
ジョグ画面
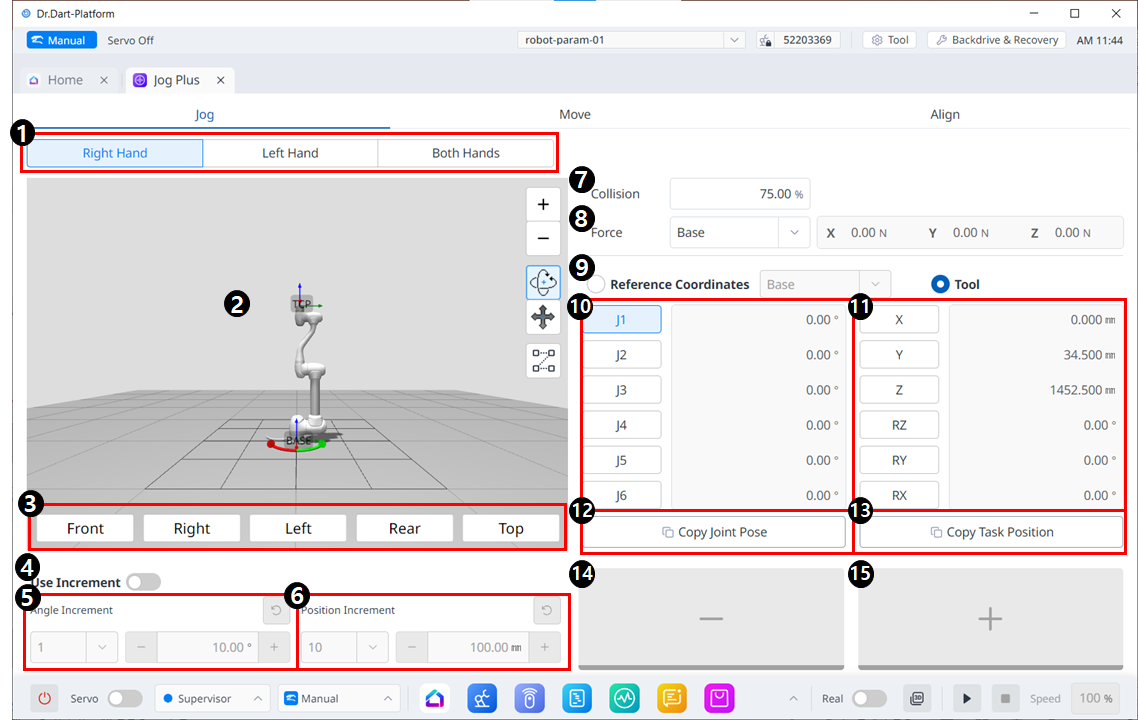
ジョグメニューのレイアウト
| アイテム | 説明 | |
|---|---|---|
| 1 | パネルの種類を選択してください | 移動ボタンの位置を選択できます。 |
| 2 | 3Dシミュレーション | ロボットの様子を確認できる3Dビューアです。 |
| 3 | シミュレータの調整 | このセクションを利用してシミュレータを操作できます。 |
4 | インクリメントを使用する | このボタンを使用すると、角度または位置の増分を有効にすることができます。 |
| 5 | 角度増分 | このセクションでは、選択した軸の角度増分を設定します。 |
| 6 | 位置の増分 | このセクションでは、選択した軸の位置増分を設定します。 |
| 7 | 衝突 | このフィールドでは、ロボットの衝突を設定します。 |
| 8 | 力の監視 | このセクションでは、ベース、ツール、ワールド、リファレンスなどに基づいて X、Y、Z 軸の力を設定します。 |
| 9 | 基準座標系を選択してください | 図 11 でタスク座標を表示またはジョギングするための参照座標系を選択します。ベース座標、ワールド座標、またはユーザー座標を使用できます。 |
| 10 | ジョイントパネル | ジョグするジョイント軸を選択できます。 |
| 11 | タスクパネル | ジョグするタスク軸を選択できます。 |
| 12 | ポーズコピー Jボタン | このボタンを使用すると、ポーズ J をコピーできます。 |
| 13 | ポーズコピー×ボタン | このボタンを使用すると、ポーズ X をコピーできます。 |
| 14 | 移動 - ボタン | 各軸を基準にロボットを-方向に移動させることができます。 このとき、左側の 3D シミュレーションで - と + の方向がわかります。 |
| 15 | 移動 + ボタン | 各軸を基準に+方向にロボットを移動させることができます。 このとき、左側の 3D シミュレーションで - と + の方向がわかります。 |