
ワールド座標系を設定する
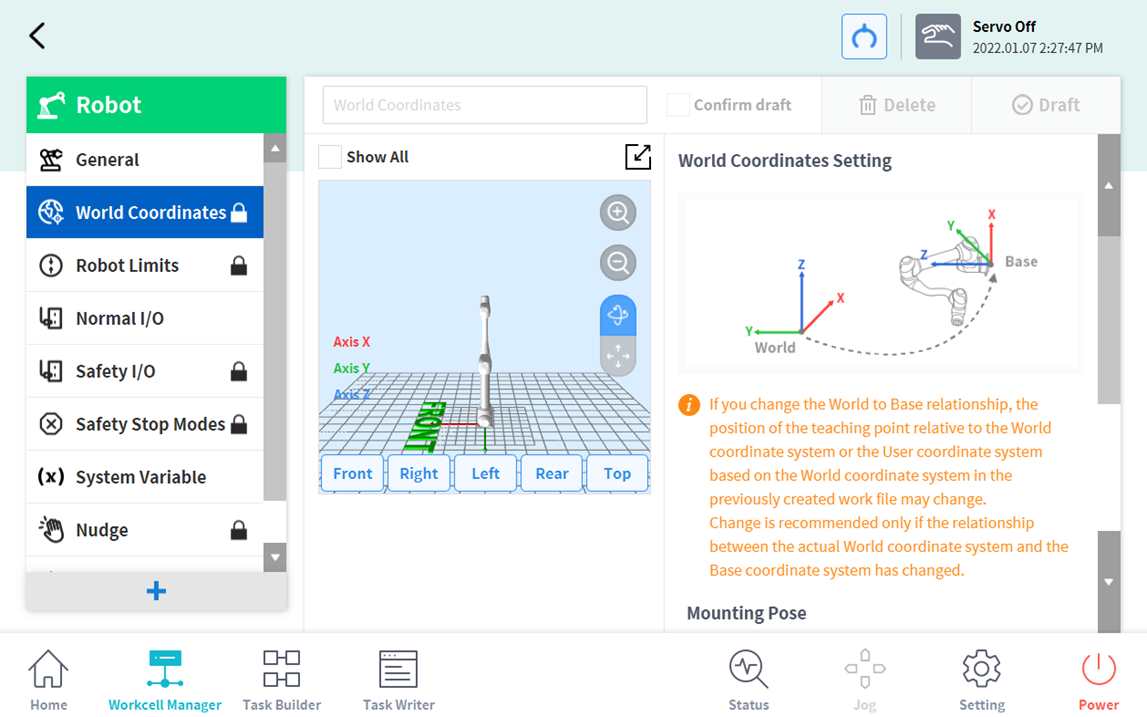
ロボットと作業対象を含む作業領域を代表する座標系の設定ができます。この座標系をワールド座標系といい、ロボットのBaseに固定されたベース座標系と区分します。ワールド座標系を基準としてベース座標系のポーズを設定でき、Task BuilderとTask Writerでロボットを利用してティーチングし動きを指定するときにも、ワールド座標系を選択できます。ユーザー座標系を設定するには、ロボットワークセルで 
- 設定のために上段の編集をタップしてください。
ワールド座標系とベース座標系の関係を表す図と注意事項を必ず参照してください。
警告
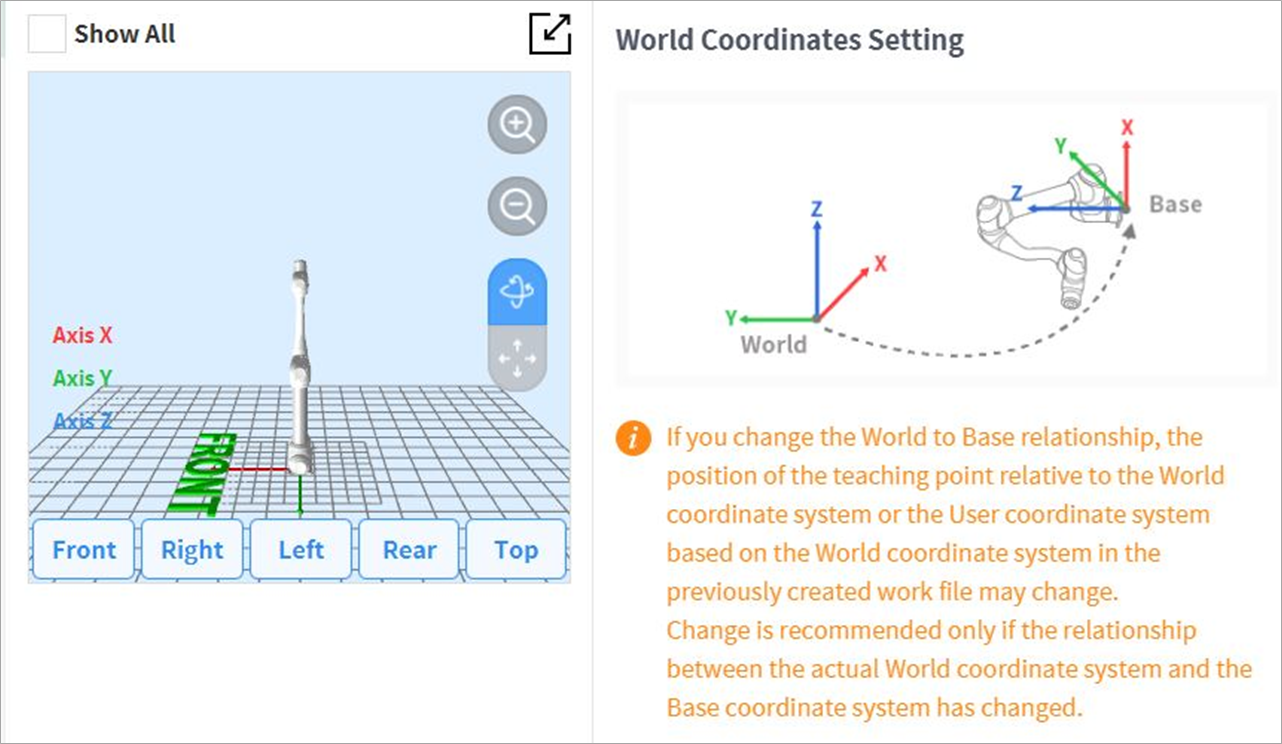
ワールドとベース間の関係を変更する場合、これまで作成された作業ファイル内のワールド座標系、又はワールド座標系をベースとするユーザー座標系のティーチング点の位置は変更になることがあります。実際のワールド座標系とベース座標系間の関係が変更になった場合にのみ、変更をお勧めします。
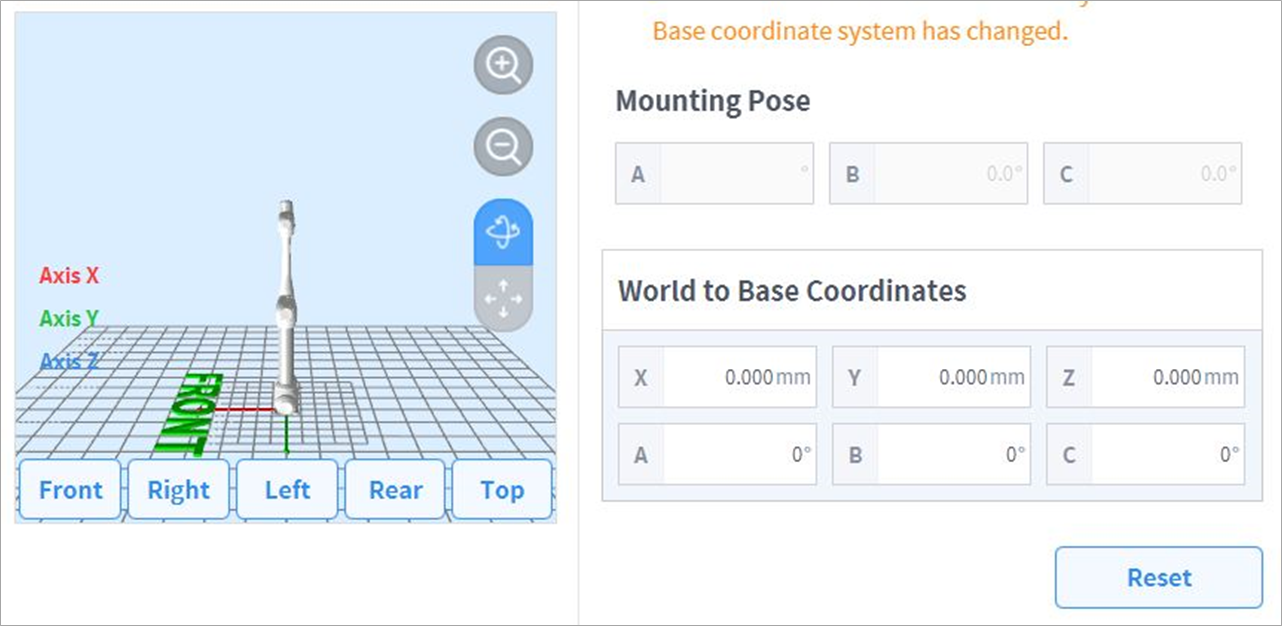
- 右中段にユーザーが設定したマウントポーズ(設置傾き)が表示されます。一般的に、ワールド座標系はユーザーの基準で作業環境を記述しているため、ワールド座標系のZ方向は天上を向いています。ベース座標系はロボットの1軸下段表面に固定されている座標系であるため、ロボットの設置位置/ポーズによってワールド座標系-ベース座標系の関係は変わります。上の図は、壁にロボットを装着した状況を仮定したものです。この場合、ベース座標系のZ軸は壁に垂直な方向で、図ではワールド座標系のY軸の方向と並んで置かれ、マウントポーズは傾き90度、回転0度で表示されます。ワールド-ベース間の関係は、ワールド座標系を基準としてベース座標系を見た関係です。事前に決められた作業環境のレイアウトがあれば、それに従って設定してください。X/Y/Z値は移動を、A/B/C値はEuler Z-Y-Z定義の回転を意味します。ロボットの設置状況によってマウントポーズを設定した場合、回転角度B/CはマウントポーズのB/Cを使用するのが適切です。但し、自動推定機能を利用してマウントポーズを設定した場合、推定値には誤差が含まれる可能性があるため、レイアウトに定義された回転角に従った方が良いです。
- 適用ボタンをタップしてください。
- 確認ボタンをタップしてください。
メモ
SWバージョンGF020400以前のバージョンで設置傾きを適用した後、Task BuilderとTask Writerで作成した作業者プログラムは、GF020400以降のバージョンにアップデートする際に設置傾きを反映してワールド座標系を設定し、作成したプログラム内に設定したベース(BASE)座標系を全てワールド座標系に変換すると、これまでのティーチング点を同様に使用できます。
複数のロボットを使って協調作業スペースで作業したり、モバイルベース又はリニアトラックのように動く装置にロボットが設置された場合、作業物とロボットのBaseとの関係及びティーチング点の位置は変わることがあり、このような状況で作業をティーチングして共有しやすいワールド座標系を設定することができます。
ロボットに初めてツールを設置したりツールが変更になった場合には、ロボットを使用する前にツール重量を設定しなければなりません。ツールの重量設定についての詳細は "ルーツ重量を設定する"を参照してください。