
ロボットを設定する
ロボットの設定画面は次のように構成されています。
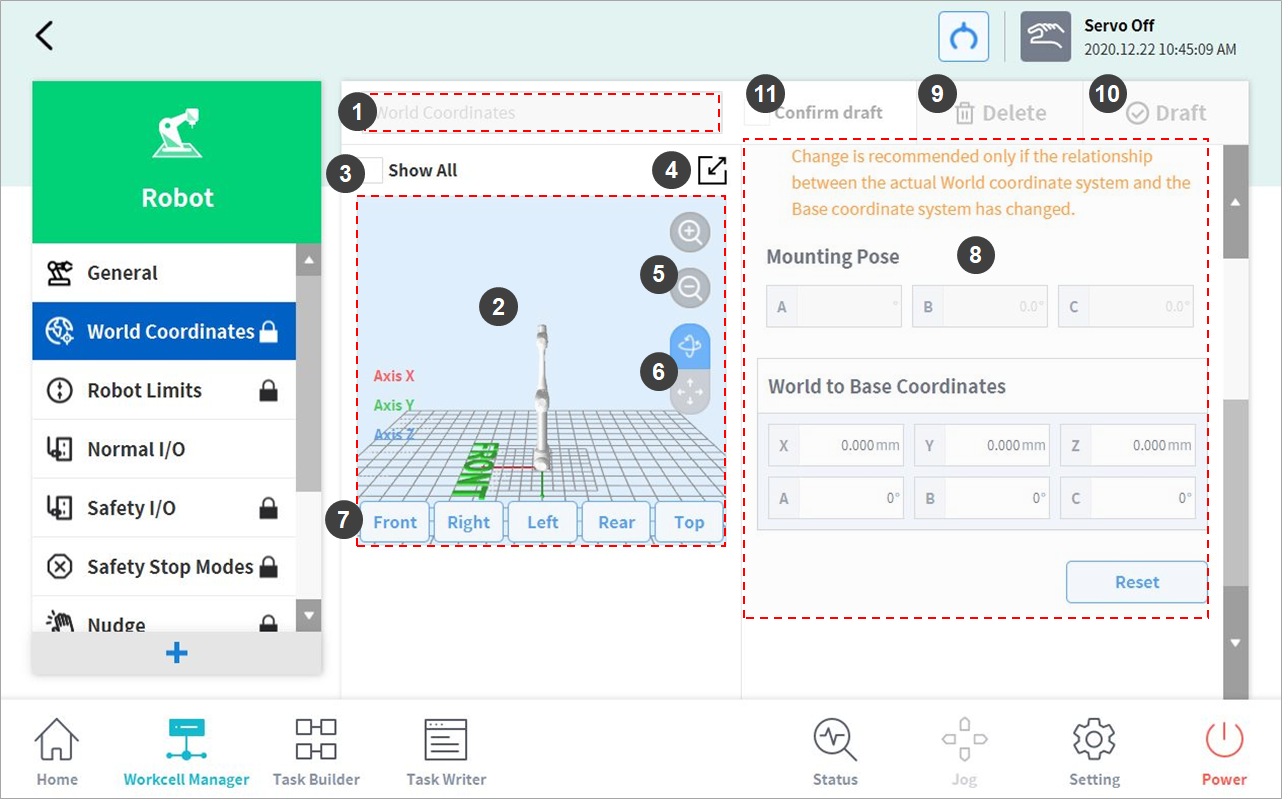
番号 | 項目 | 説明 |
1 | Enter Workcell Name | ワークセルの名前を入力します。 |
2 | Simulation Screen | ワークセルの作動スペースのシミュレーションを表示します。 |
3 | View All | 登録された別のワークセルをすべて見ることができます。チェックボックスにチェックを入れると、"すべてを見る"機能が活性化します。チェックを取ると再び機能が非活性化します。 |
4 | Change to Full Screen ( | シミュレーション画面が最大画面に切り替わって表示されます。最大画面で縮小画面( |
5 | Zoom In ( | シミュレーション画面を拡大したり縮小します。 |
6 | Rotate ( | シミュレーション画面を回転したり好きな方向に移動します。望みのボタンをタップしてから、画面をドラッグしたりタップして操縦できます。 |
7 | Simulator Direction Setting | シミュレーションの方向を設定します。選択した方向を基準としてシミュレーションを表示します。 |
8 | Work Space | ワークセルの作動スペースを表示します。 |
9 | Delete | 現在設定中のワークセルを削除します。 |
10 | Draft Confirm | 臨時保存:ワークセルの作動スペース設定を臨時保存します。 確認:作業中或いは臨時保存が確定したワークセルの作動スペース設定を保存します。 (安全に関連したワークセルにのみ臨時保存を確認してから確認ボタンが表示され、一般ワークセルでは確認ボタンのみ表示されます。) |
11 | Confirm Draft | 臨時保存されている作動スペース設定を最終的に保存するために確定します。 (安全に関連したワークセルにのみ表示され、一般ワークセルでは表示されません。) |





