
順応制御と接触感知機能
斗山ロボティクスだけの固有の力制御技術で、順応制御(Compliance Control)機能と接触感知(Contact Sensing)機能を利用すると、ロボットの動作中に作業物と周囲の物体の許容範囲内では位置誤差を許容するため、正確な位置を指定するための反復作業なしに楽にティーチングできます。
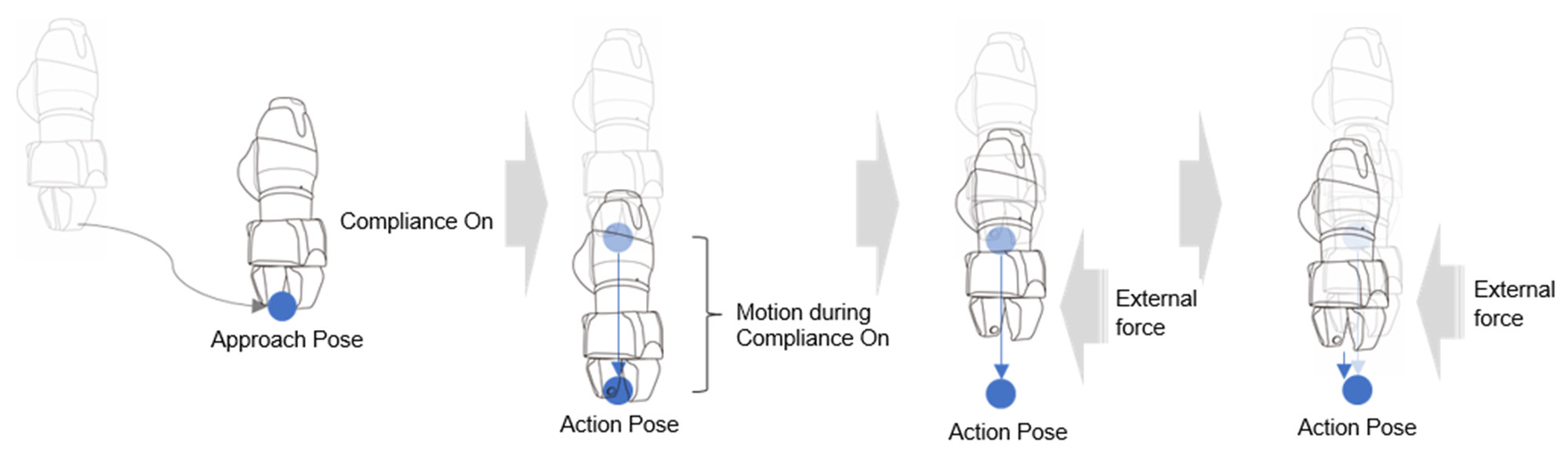
順応制御機能:進入(Approach) à 作業(Action) à 後退(Retract)移動する際、外部から力が加わるとスプリングのように若干の復元力を持ちながら、決められた位置から外れることを許容します。
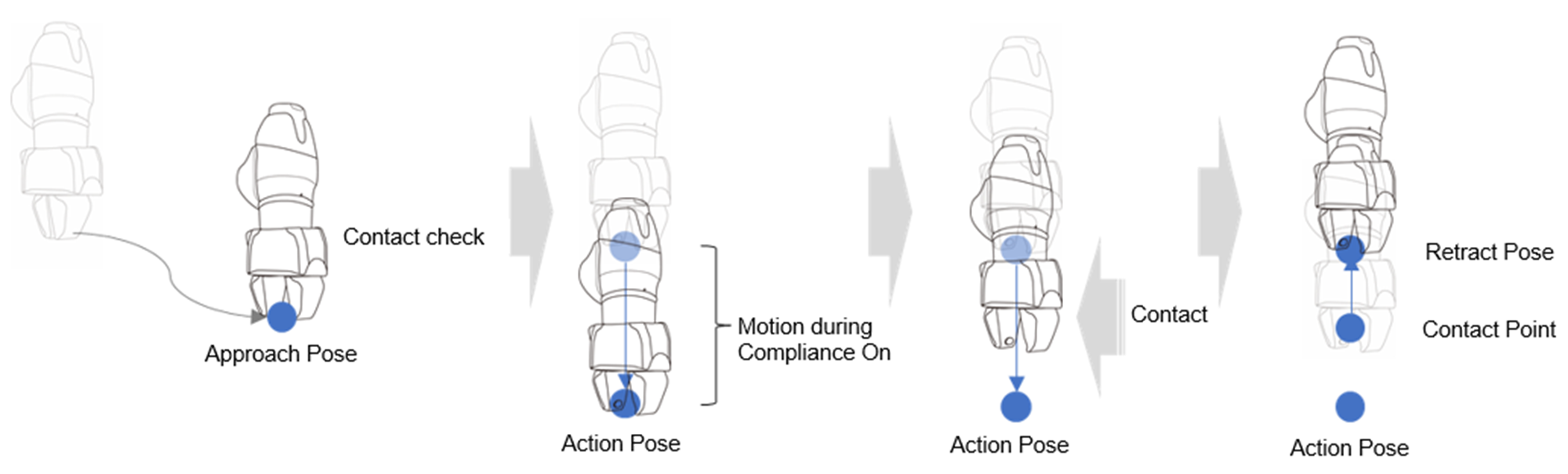
接触感知機能:ユーザーが入力したContact ForceとContact Determination Range値を基準として対象物との接触を認識し、該当位置で止まってグリッパーを作動させて対象物をつかみます。
- 順応制御機能と共に使用しなければなりません。Forceに値を入力して順応制御機能をオンにしない場合、エアーが発生します。
- 接触感知機能は、外部環境と接触が発生する際に感知する機能です。衝突感知感度を鈍感に設定したり、衝突感知機能をオフにしてから使用しなければなりません。
- 接触感知機能を使用する際、順応制御機能のオプションの中で作業方向側の剛性(例:z方向)値を大きくしたり、速度を速くした場合、外部と接触する際に過度な力が発生することがあるため、注意しなければなりません。(作業速度が速い場合には剛性値を下げ、作業速度が遅いときは剛性値を高めるなど、作業状況によって値を適切に調節しなければなりません。)
注意
- A-Seriesを使用するとき、FTSが取り付けられていない場合は、接触感知機能を使うことができません。この場合、順応制御の場合は制限的に使用が可能で、剛性値はTranslation(X、Y、Z)方向のみ変更できます。