スキル命令語の基本作動パターンを理解する
スキル命令語はいくつかの作動パターンを基盤としています。
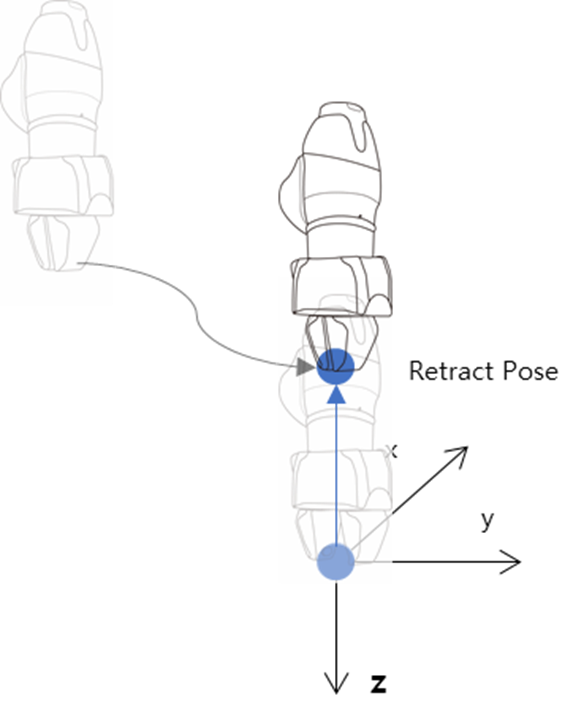
ロボットは、作業開始のために現在装着されているツールの重量とツールの中心位置(TCP)について設定しなければならず、実際にツールが作動する作業点(reference pose)から垂直方向に進入点(approach pose)及び後退点(retract pose)を持つことが、スキル命令語の基本作動パターンです。
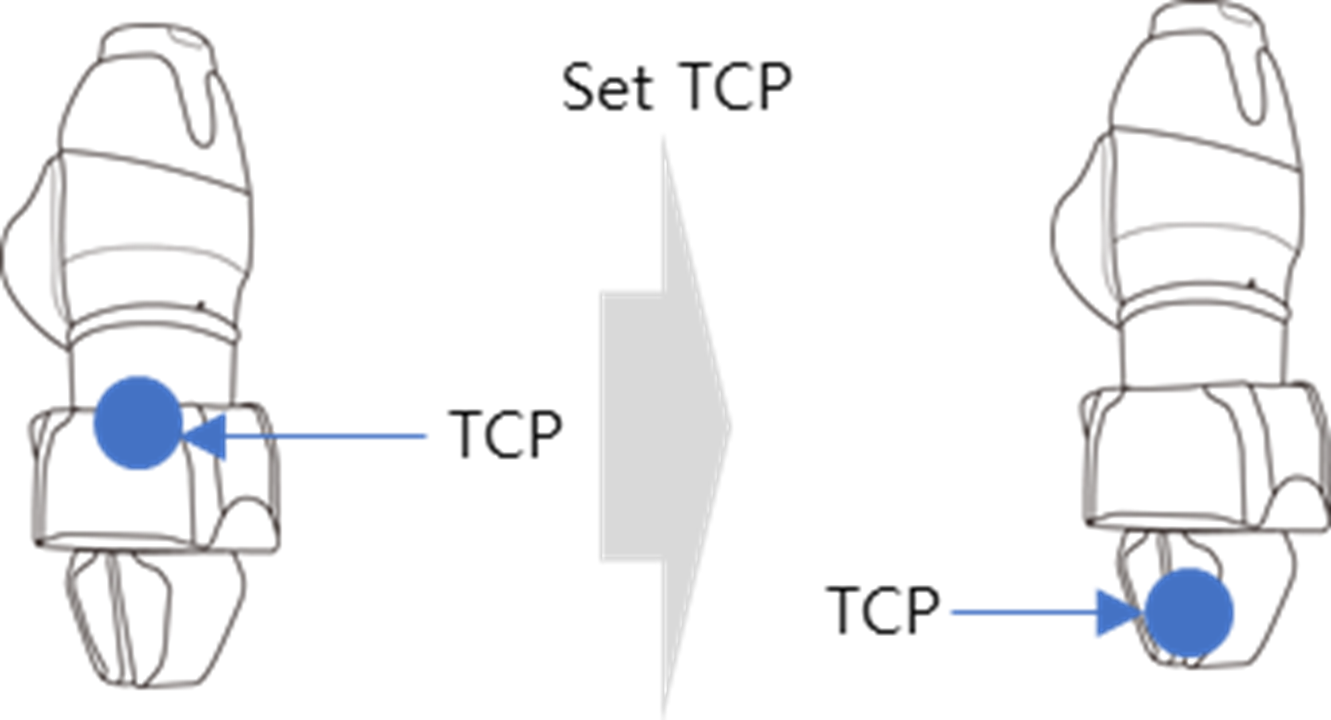
TCPの設定:エンドエフェクタ(End Effector)のスキル命令語を使用する際、自動でTCPオフセットが変更設定されます。エンドエフェクタのスキル命令語遂行開始段階には、エンドエフェクタのTCPに合ったオフセット設定が含まれています。TCPオフセットが変更された場合、前のモーション命令語と連結して動きをスムーズに転換するブレンディングモーション機能は使用できません。
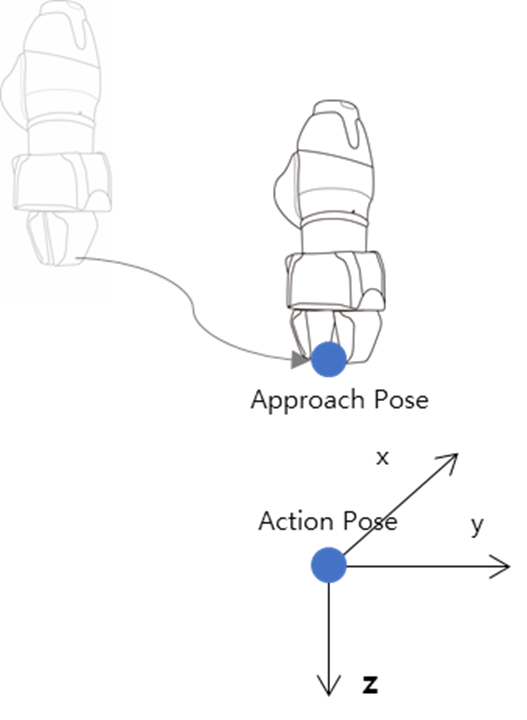
進入点(Approach Pose)に移動:作業点の位置に接近できる位置です。作業点を基準として、基本的にツール座標系のZ方向が設定されており、別の方向も選択できます。作業点について入力された接近距離(approach distance)で自動計算され、該当位置に移動します。
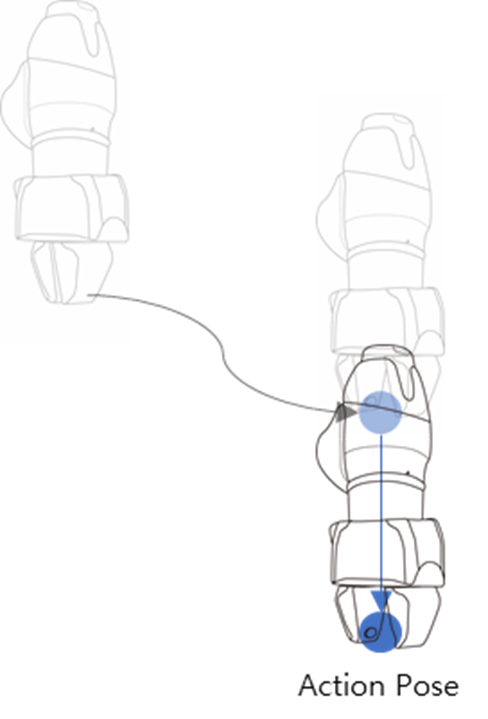
作業点(Reference Pose)に移動: エンドエフェクタ(End Effector)の作業対象物にエンドエフェクタの作業を実行する位置です。作業点(Reference Pose)に移動する際、速度、加速度設定の他に細部座標系の設定などが必要な場合、作業点の右側にある ボタンを押してください。ただし、モーションの細部オプションを設定する際、相対位置のタブを利用するとスキルを実行する際誤作動を起こす恐れがあるため、作業点のティーチングは必ず絶対座標を基準にしてください。
後退点(Retract Pose)に移動:対象物をつかんで安全に別の位置に移動するための位置です。作業点を基準としてツール座標系のZ方向で、別の方向も選択できます。作業点について入力された後退距離(retract distance)で自動計算され、該当位置に移動します。
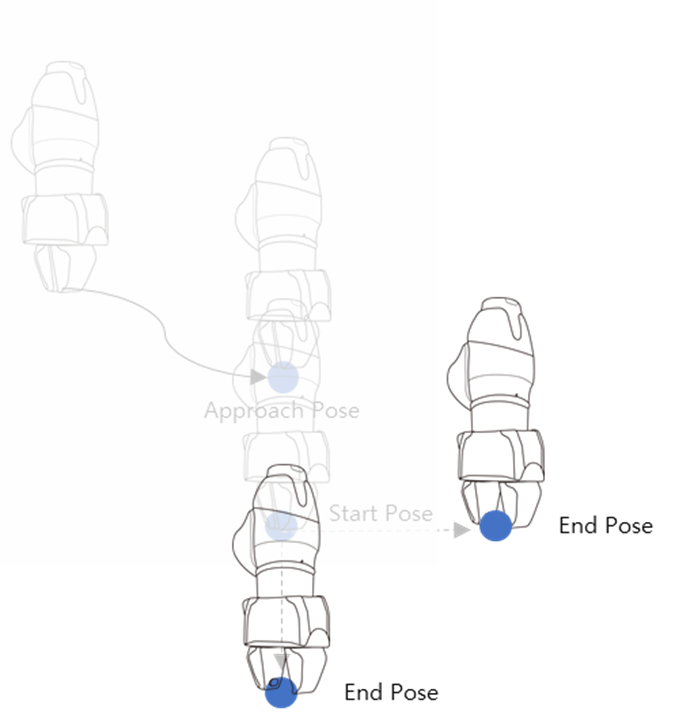
作業開始点(Start Pose)に移動: エンドエフェクタの作用対象である作業対象物が一度の作業で終わらない場合、開始点と経由点、終了点が存在することがあり、作業開始点は作業区間に進入して作業を開始する位置です。(例: Door_OpenClose Skill - Start Pose)
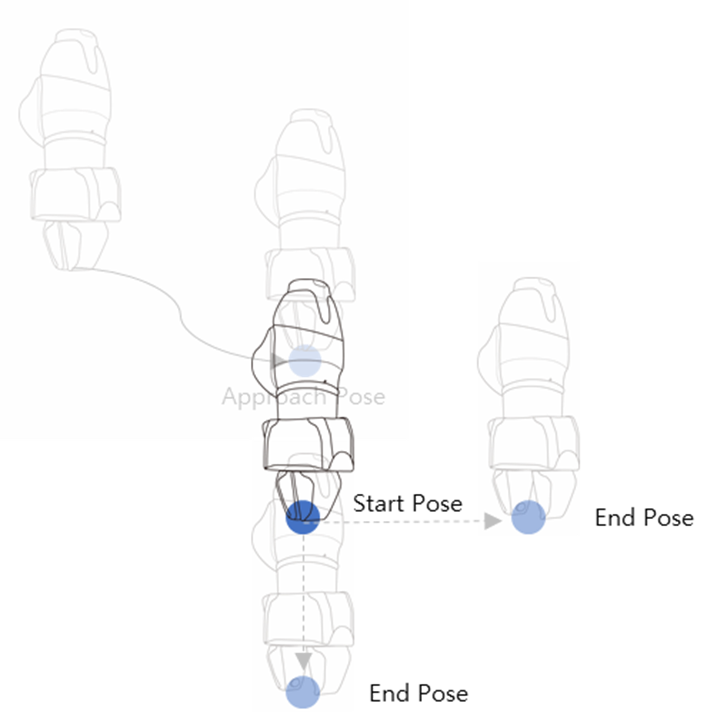
作業終了点(End Pose)に移動: エンドエフェクタの作用対象である作業対象物が一度の動作で終わらない場合、開始点と経由点、終了点が存在することがあり、作業終了点は作業区間に進入して作業を終了する位置です。(例: Door_OpenClose Skill – End Pose)