
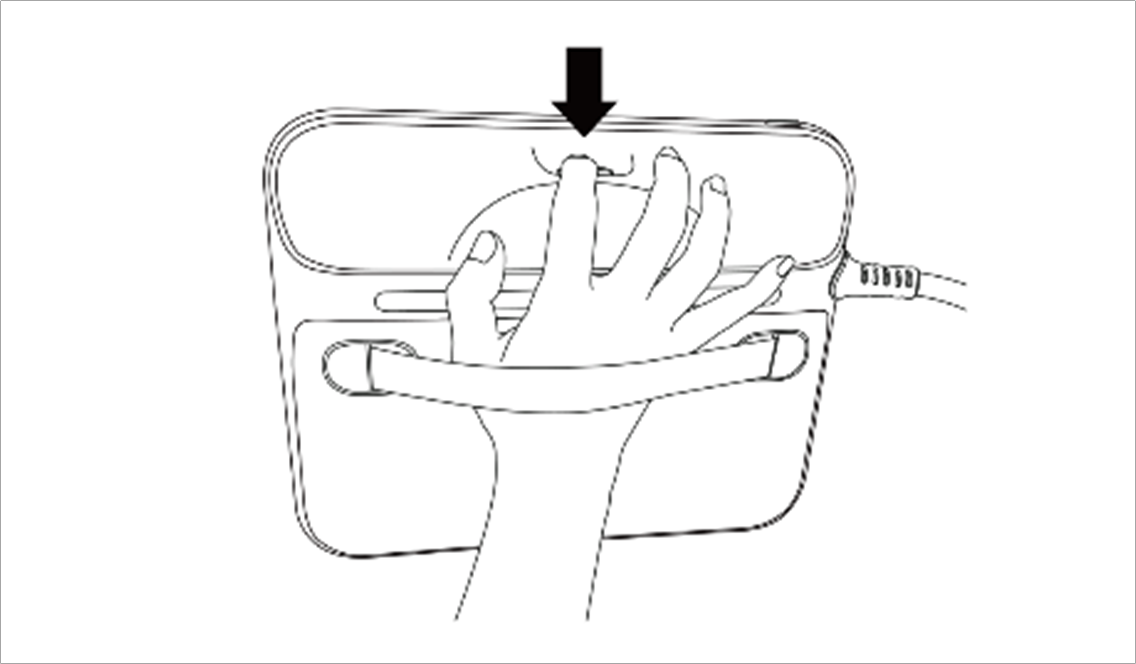
ティーチペンダントのハンドガイディングボタンを使用する
ティーチペンダントの裏面にあるハンドガイディングボタンを押した状態で、ユーザーが直接ロボットのポーズを変更できます。
メモ
ハンドガイディングボタンは基本的に手動モードでのみ使用でき、Task BuilderとTask Writerのタスクプログラムが実行中の自動モードでは使用できません。ただし、自動モードでもTask WriterのHand Guide命令でハンドガイディング準備(Handguiding Ready)状態に切り替われば、使用できます。