
目標物を基準として整列する
作業物のティーチングのために作業物の特定軸方向にTCPを整列する場合に有用な機能です。ポーズを固定してからティーチングを行うには、コクピットボタンを利用した面又は線の固定ダイレクトティーチング機能を利用してください。
ロボットのTCPを目標物を基準として整列するには:
- Settingsタブを選択した後、Parallel To Targetタブを選択してください。
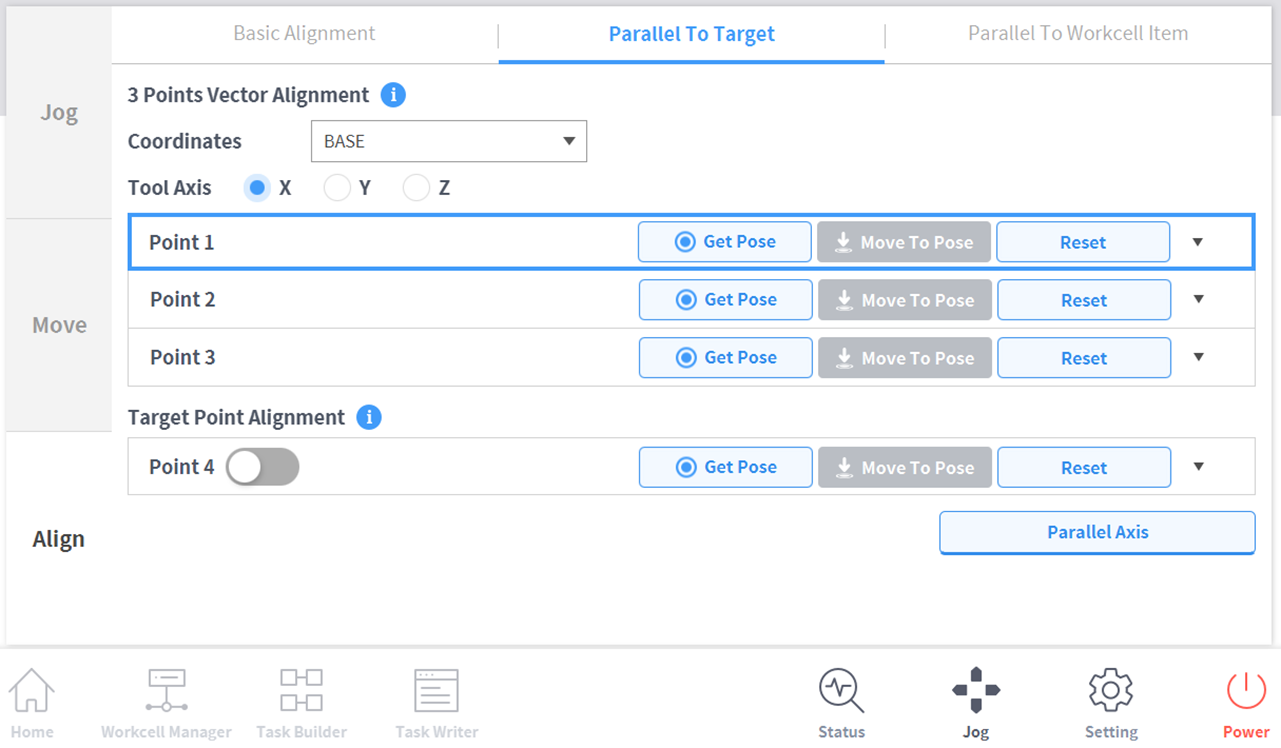
- 整列しようとする基準座標系を選択してください。

- 整列しようとするツールの軸を選択してください。

- ロボットを目標の位置に移動した後、Point 1をタップしてください。
- Point 1のSave Poseボタンをタップしてください。
- Point 2、Point 3も同じ方法で設定します。設定が完了したら、3点を基準としてバーチャルベクトル領域が設定されます。

- Point 2、Point 3も同じ方法で設定します。設定が完了したら、3点を基準としてバーチャルベクトル領域が設定されます。
- (選択事項) TCPの方向と一緒に位置も指定するには、Point 4のtoggleボタンをタップした後、ロボットを目的の位置に移動してからポーズ保存ボタンをタップしてください。
- Parallel Axisボタンを長押しして、軸を整列してください。
- 目標物を基準として、z軸方向の150 mm上に6軸ヘッドを位置させます。