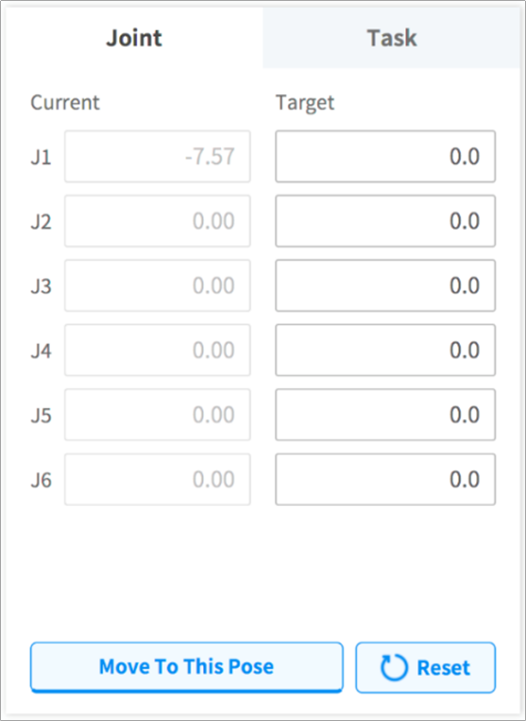
特定角度でロボットを移動させるには:
Please note, these errors can depend on your browser setup.
If this problem persists, please contact our support.