システムブーティング
電源が入るとシステムブーティングが始まります。ブーティングが完了すると、システム運用プログラムがティーチペンダントの画面に現れます。システム運用プログラムについての詳細は、“ プログラム画面の構成”を参照してください。
メモ
- サーボオン(Servo On): ロボットのポーズを移動するためには、ロボットのジョイントに電源が入り、ロボットの状態が待機状態に切り替わるサーボオン状態にならなければなりません。サーボオンについての詳細は、" Servo On"を参照してください。
- 日付と時間の設定:ティーチペンダントに表示される日付及び時間とロボットに保存されるログメッセージは、システム運用プログラムに設定された日付と時間を基準として表示されるため、最初のブーティング後に日付と時間を設定しなければなりません。日付と時間を設定する方法は、“ 日付と時間を設定する”を参照してください。
- DART Platformを使えば、ティーチペンダントなしでもロボットの制御ができます。
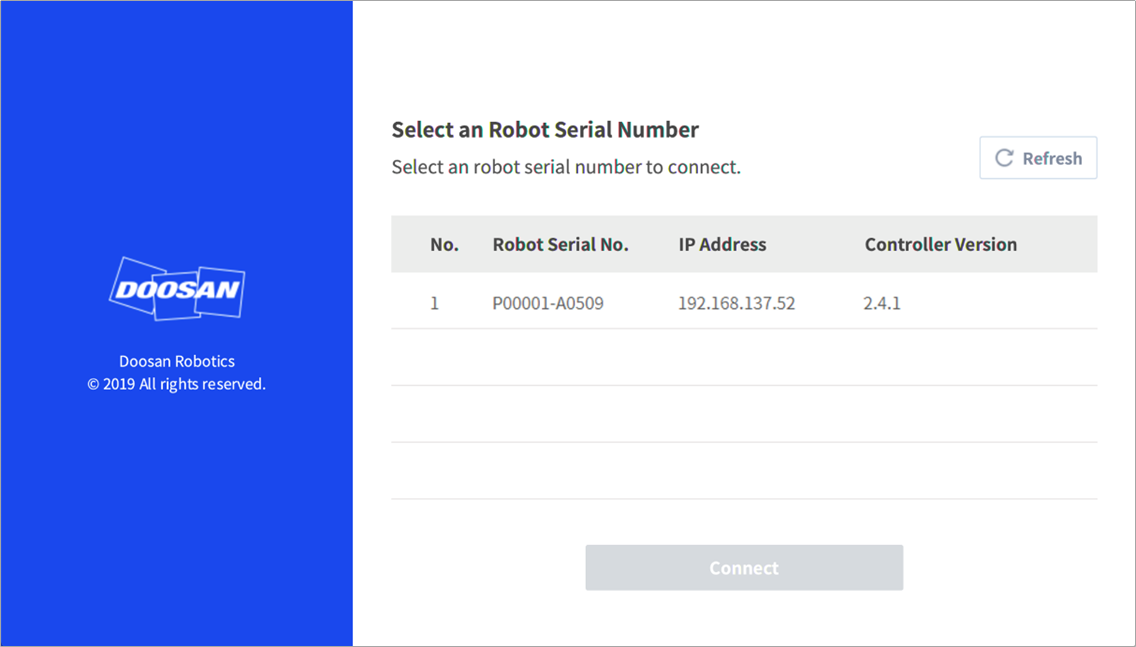
- DART Platformの場合、ブーティングが完了すればネットワークに接続されているロボットを表示する画面が現れ、この画面で接続したいロボットのシリアル番号を確認して接続することになります。