
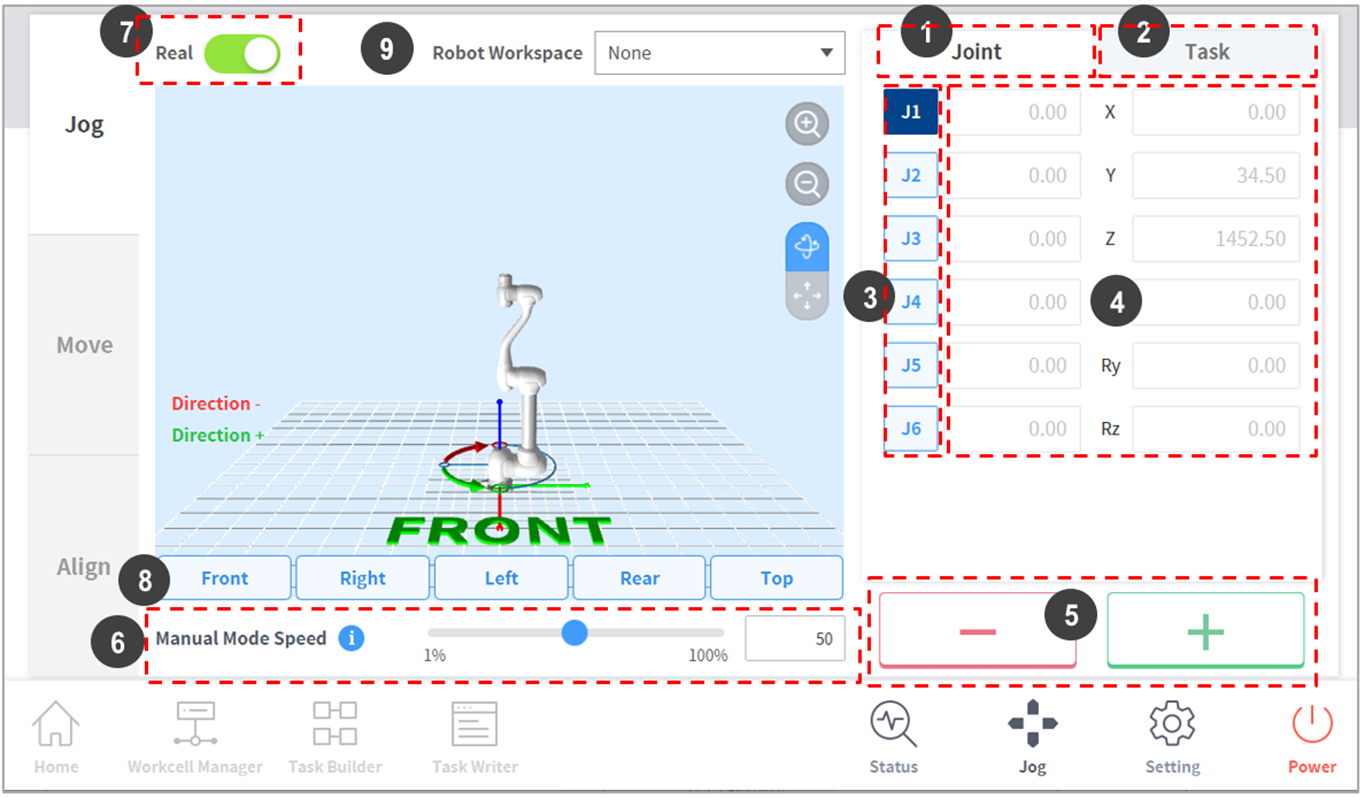
ジョグ画面
ジョグ画面では、現在のロボットの位置を基準に探索できます。
番号 | 項目 | 説明 |
|---|---|---|
1 | Joint | ジョイントをジョグモードの基準座標に設定します。 |
2 | Task | タスクをジョグモードの基準座標に設定します。 |
3 | Select Axis | ジョグモードで移動する軸を選択します。
|
4 | Coordinate Display | 現在jogモードで使用中のロボットの位置座標が表示されます。方向ボタンを押してロボットの位置が変更されたら、座標値も一緒に変更されます。 |
5 | Direction | 選択した軸の+又は–方向にロボットを移動させます。 |
6 | Manual Mode Speed | 手動モードでのロボット移動速度を設定します。スライダーポイントをドラッグして速度を調節できます。 スライダーポイントが100%であれば、ジョグタブでは対応するジョイントの最高速度は30 deg/sで、タスクの最高速度は250 mm/sです。この速度はジョグ及び移動ボタンでロボットを操作する速度にのみ影響を与えます。 |
7 | Real Mode | ジョグモード使用時に実際のロボットの動作の有無を設定します。
|
8 | Simulator Alignment | シミュレーターに表示されたロボットの整列方向を選択します。各方向ボタンを押すと、ロボットが該当する方向に整列します。 |
9 | Robot Workspace | Workcell Managerに登録されたロボット作業スペース情報を、Jogシミュレーターに表示します。ドロップダウンメニューを押して表示する作業スペースを選択します。 |


メモ
- TCPの速度制限:安全ポリシーによってジョグ及び移動ボタンを使用中には、最高速度が250 mm/sに制限されます。
- ジョグモードでロボットが移動中に、ジョイントリミットの超過或いは衝突が感知されてロボットが止まった場合、安全リカバリーモードに進入してジョイント角度の制限内にロボットが位置するようにロボットを移動させてください。安全リカバリーモードについての説明は、“ 安全リカバリーモードを使用する”を参照してください。