注意
サンプルを試す前に、必ず 注意事項を読んで従うようにしてください。詳細については、『パート 1.』を参照してください。安全マニュアル
注記
-
コンプライアンス制御を有効または無効にするときにしきい値を超える外部トルクがある場合、ロボットはJTS(ジョイントトルクセンサ)エラーのためにプログラムを停止します。
-
外部トルクサイズに関係なく剛性変更が可能です。
-
コンプライアンス制御中は、MoveJコマンドなどのジョイント動作は実行できません。
|
JTSエラーのしきい値(Nm) |
||||||
|
モデル |
J1 |
J2 |
J3 |
J4 |
J5 |
J6 |
|---|---|---|---|---|---|---|
|
M1013 |
25 |
25 |
25 |
15 |
15 |
15 |
|
M0617 |
30 |
30 |
30 |
15 |
15 |
15 |
|
M0609 |
18 |
18 |
15 |
15 |
15 |
15 |
|
M1509 |
18 |
18 |
15 |
15 |
15 |
15 |
|
H2515 |
40 |
50 |
40 |
15 |
15 |
15 |
|
H2017 |
40 |
50 |
40 |
15 |
15 |
15 |
-
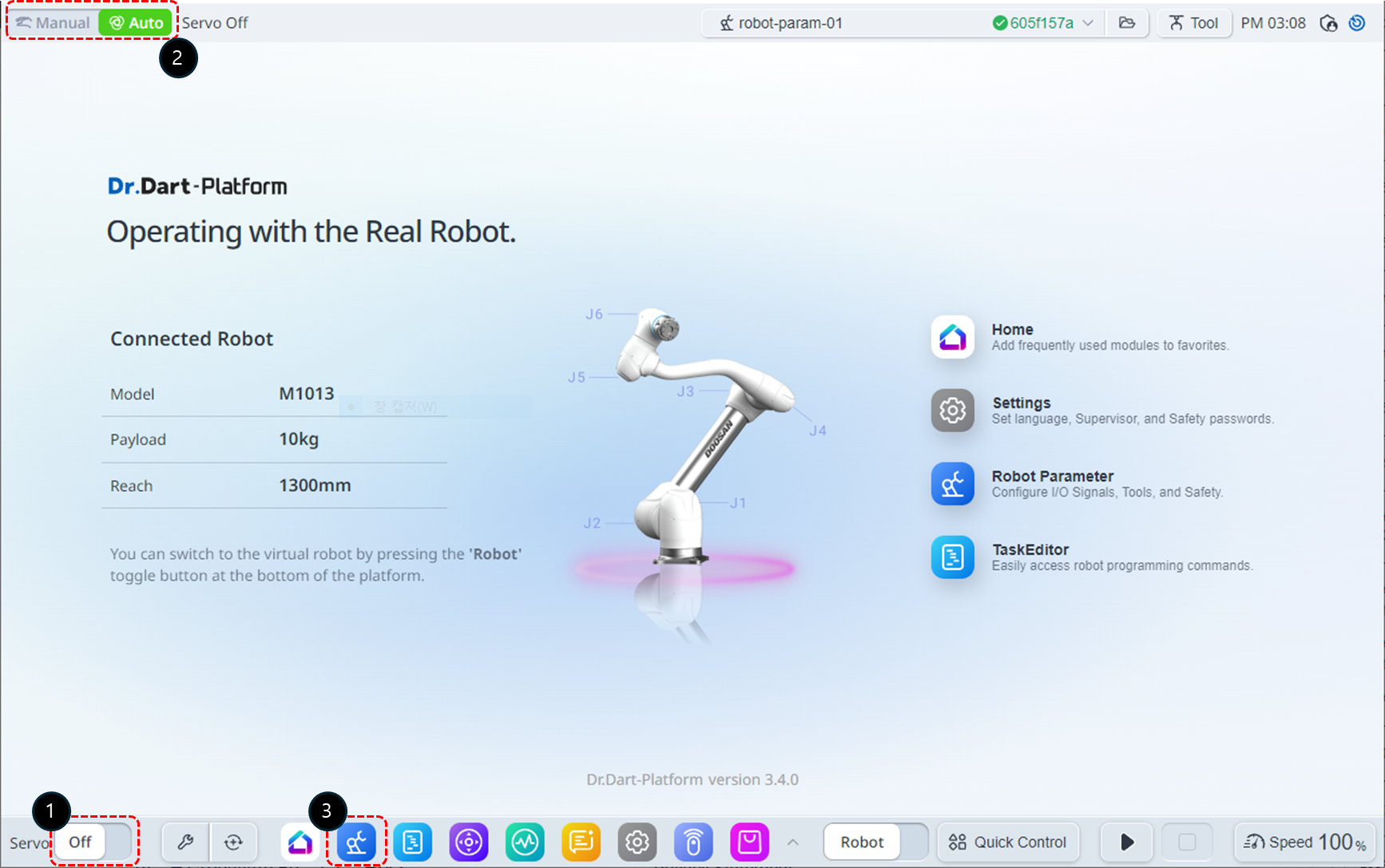
サーボ状態をオンに変更します
-
操作モードを手動に変更します。
-
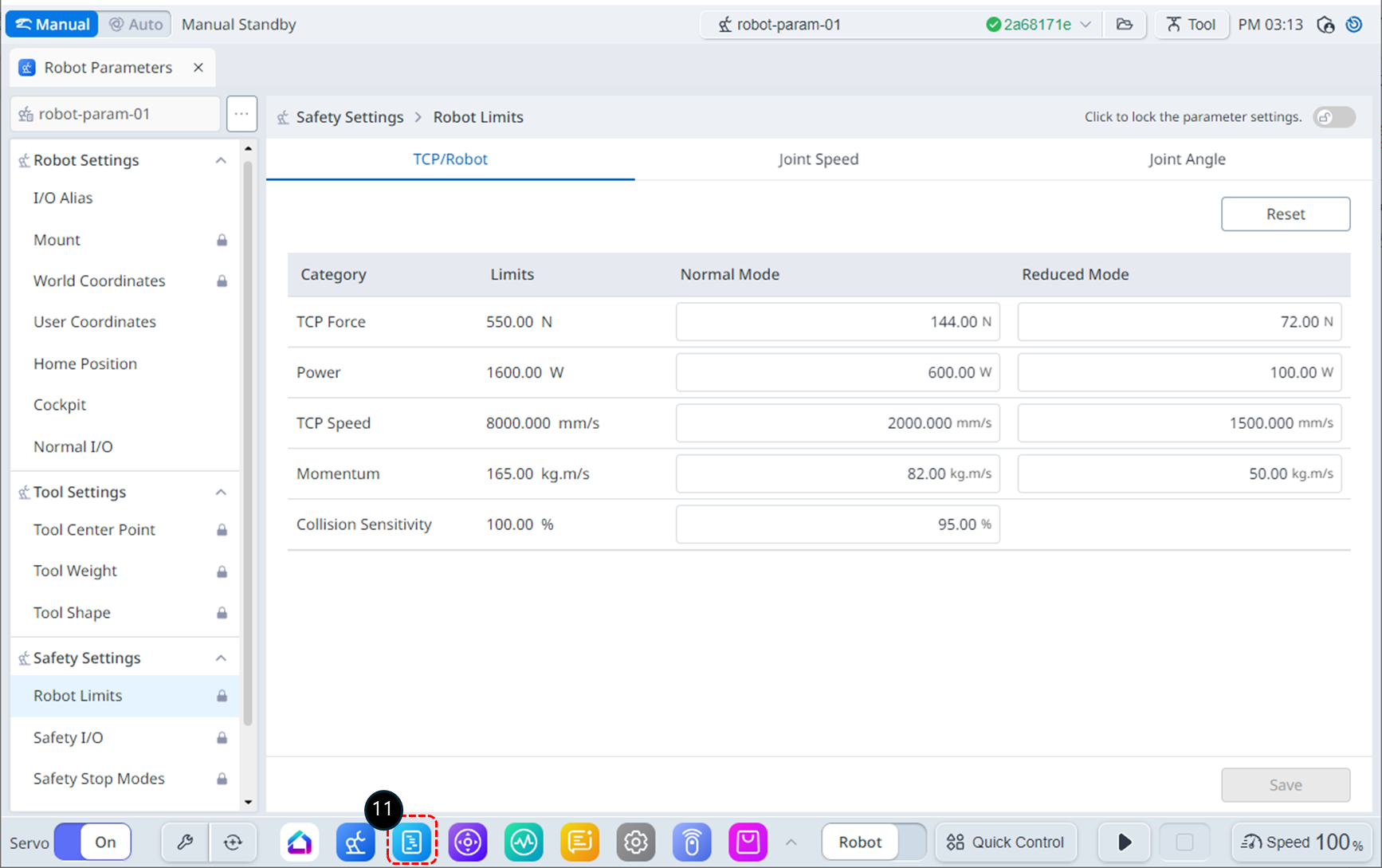
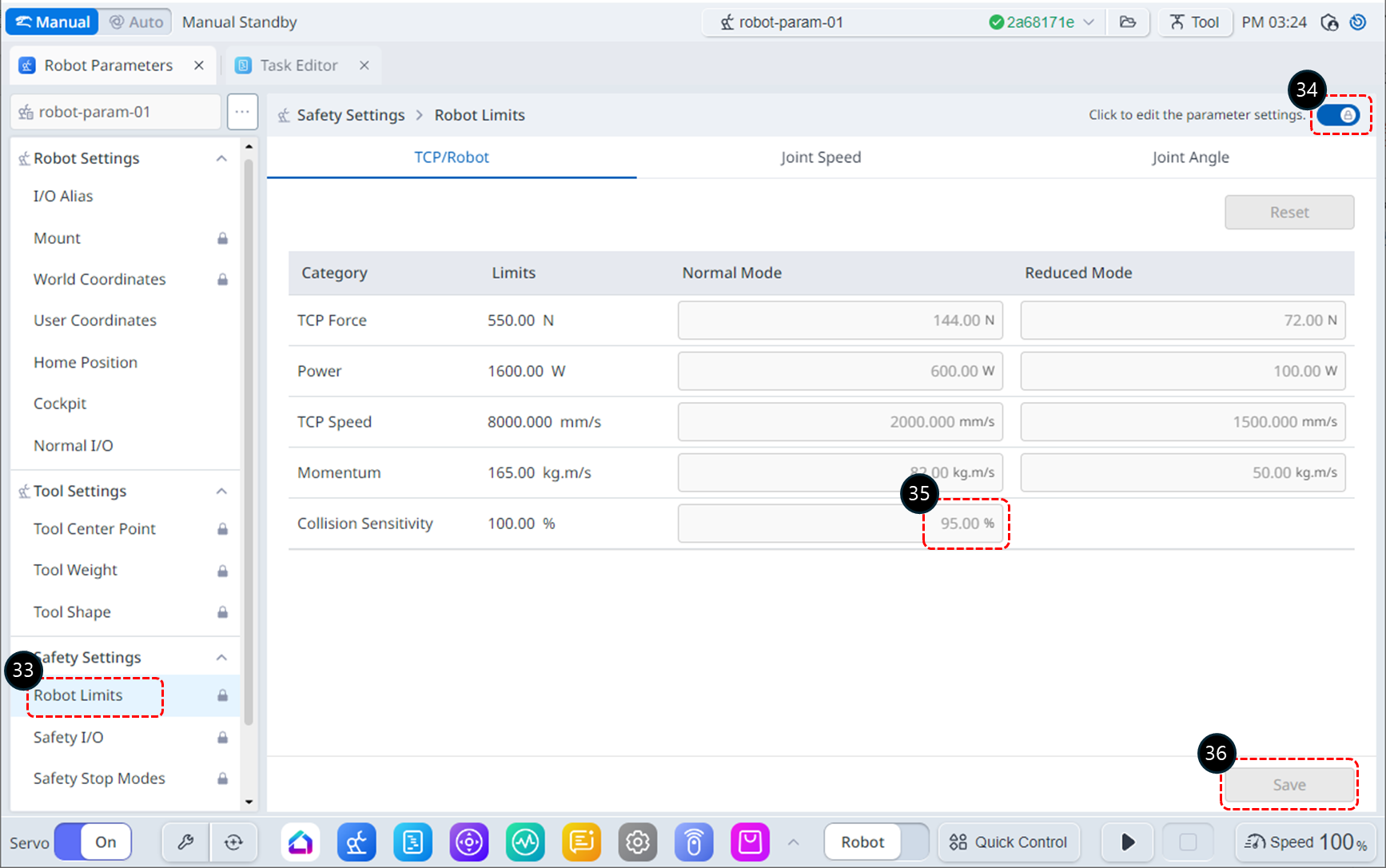
下部メニューからロボットパラメータモジュールを選択します。この例では、コンプライアンス制御を使用するときに衝突感度を下げる理由を説明するために、衝突感度を95%に設定しています。
-
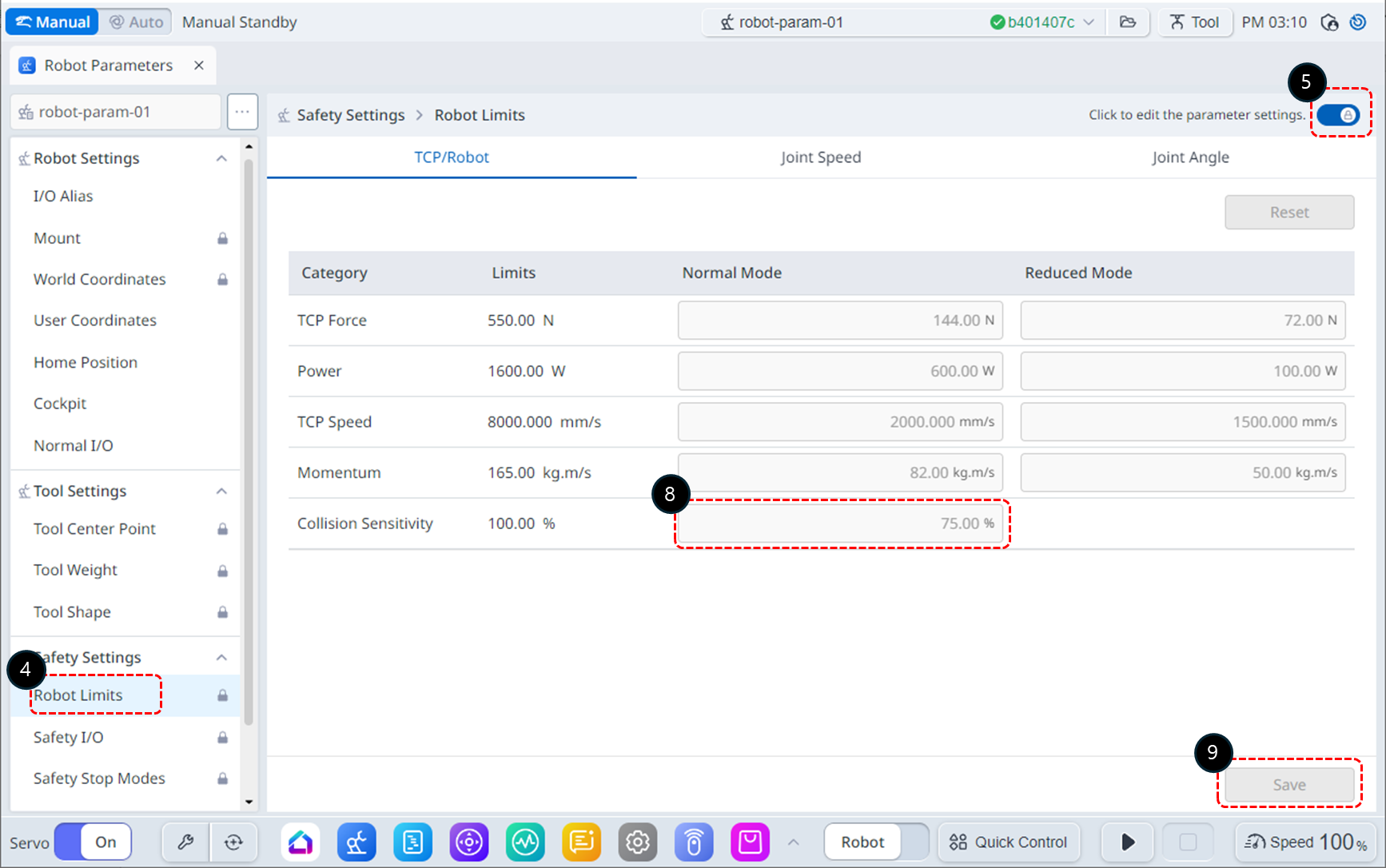
安全設定からロボット限界を選択します。
-
パラメータの編集状態を有効にします。
-
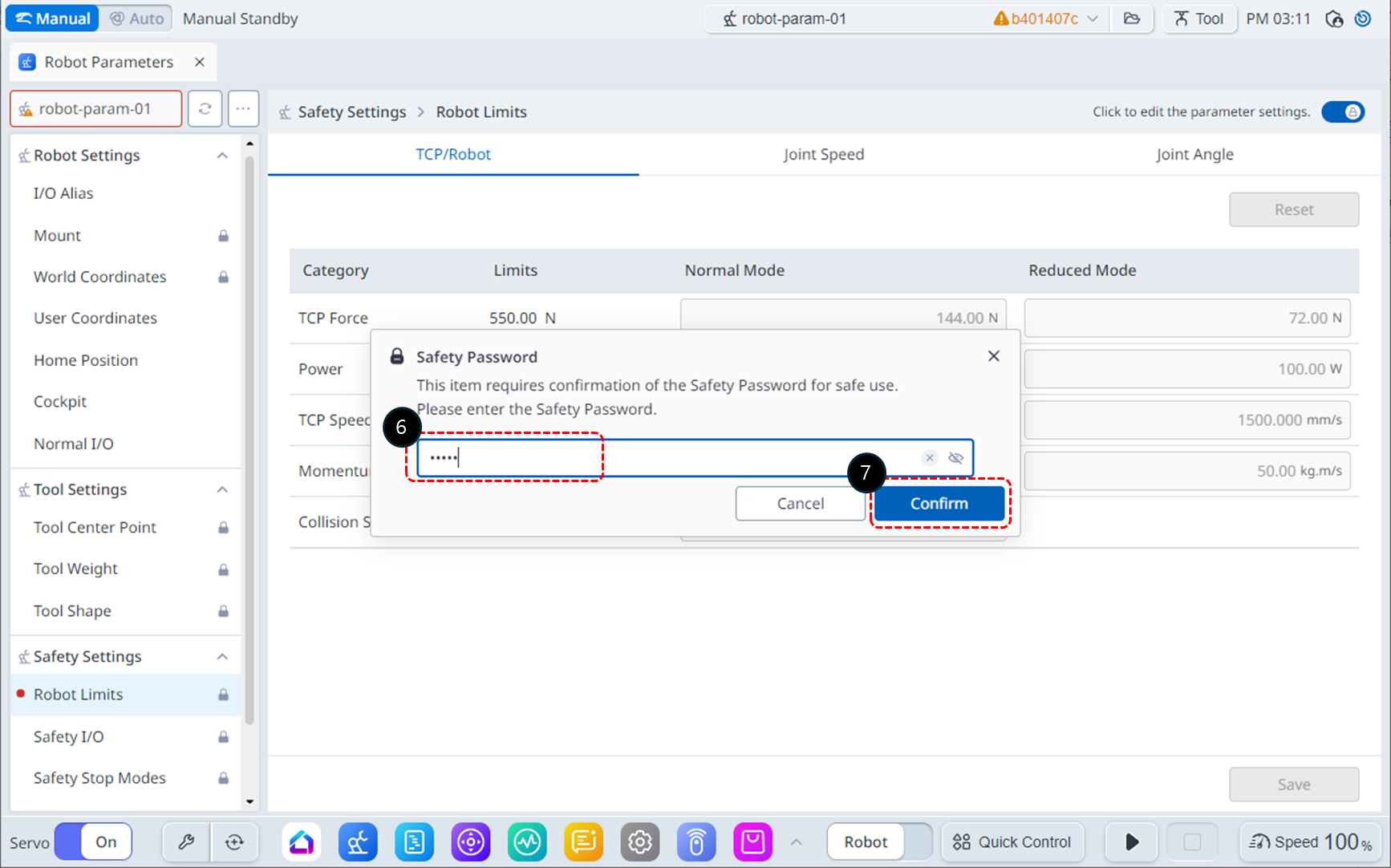
パスワード入力ウィンドウが表示されたら、Safety Password(安全パスワード)(デフォルトの安全パスワード:admin)を入力します。
-
[確認]ボタンをクリックします。
-
Collision Sensitivityを95%に変更します。
-
Saveボタンをクリックして設定を保存します。
-
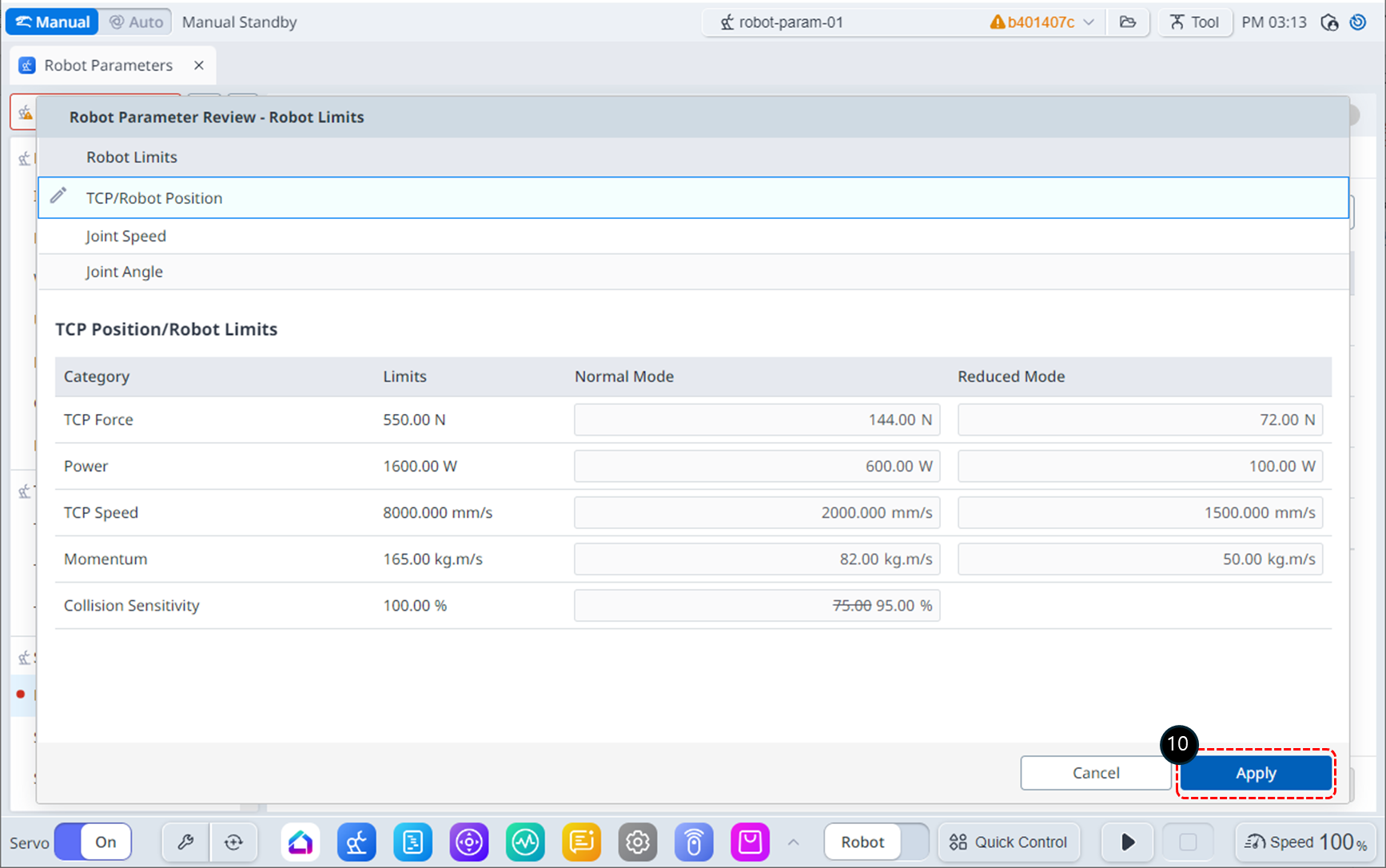
変更を確認したら、[適用]ボタンをクリックします。
-
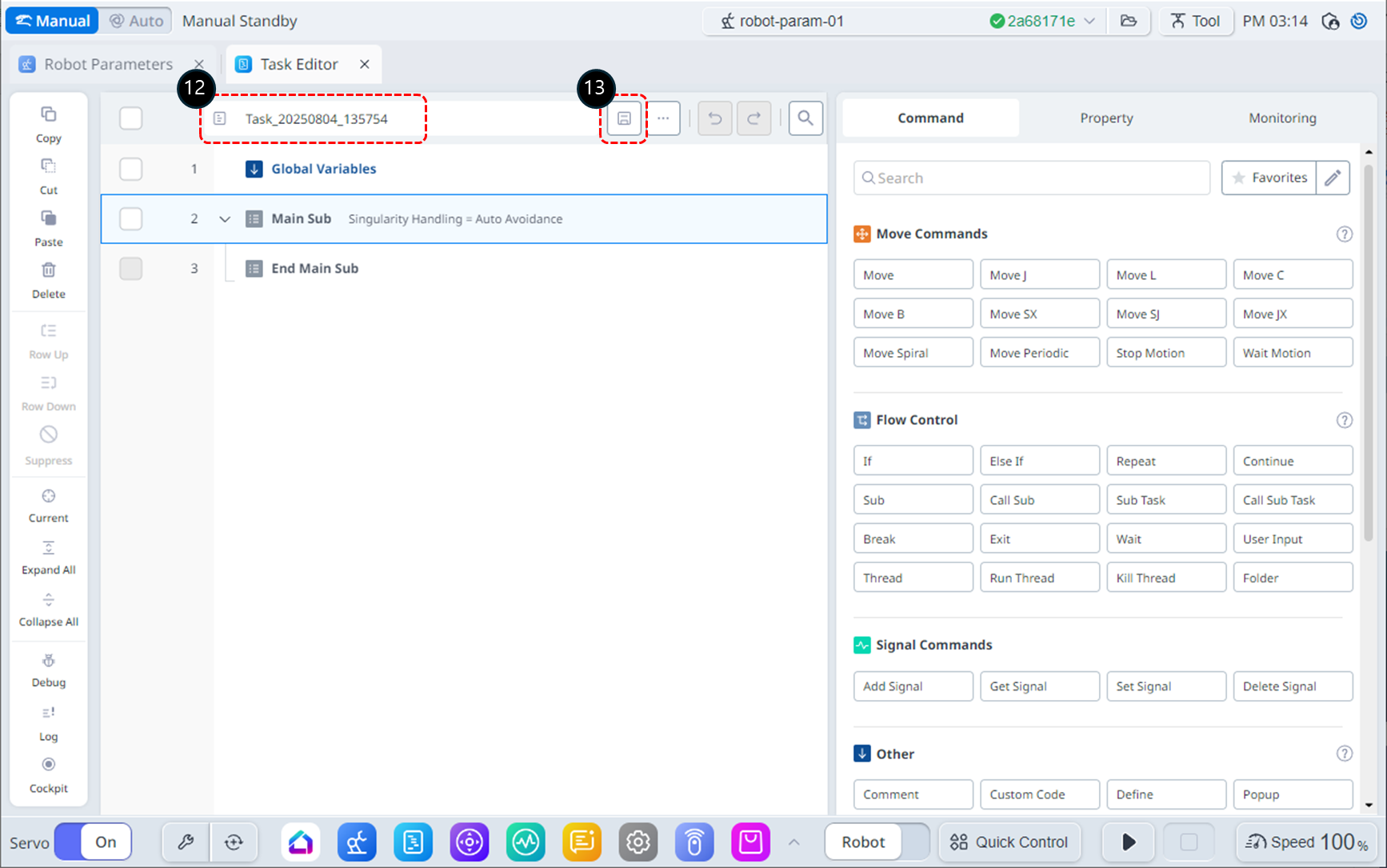
下部メニューからタスクエディタモジュールを選択します。
-
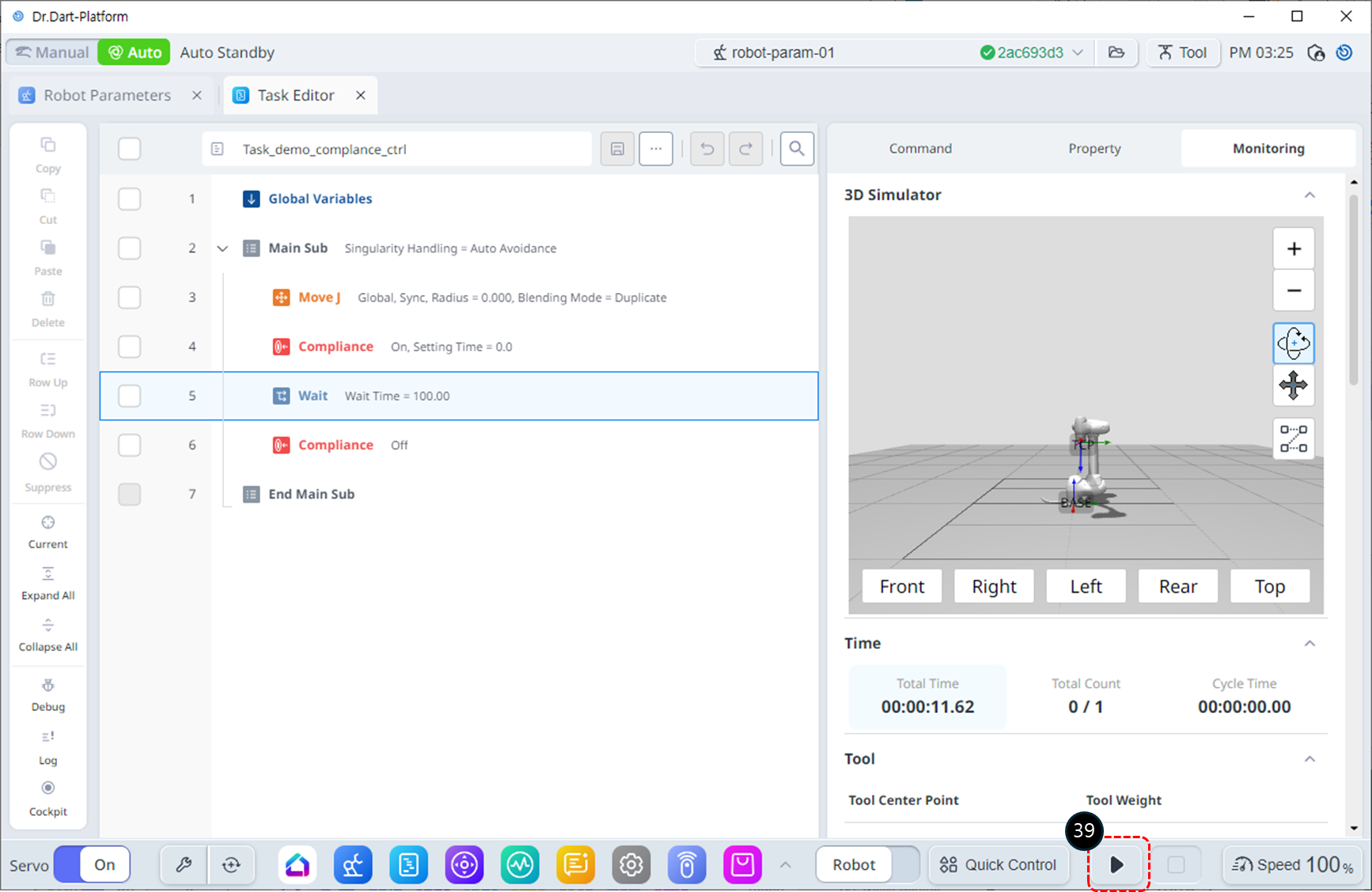
タスクの名前を Task_demo_compliance_ctrlに変更します。
-
更新したタスク名を保存します。
-
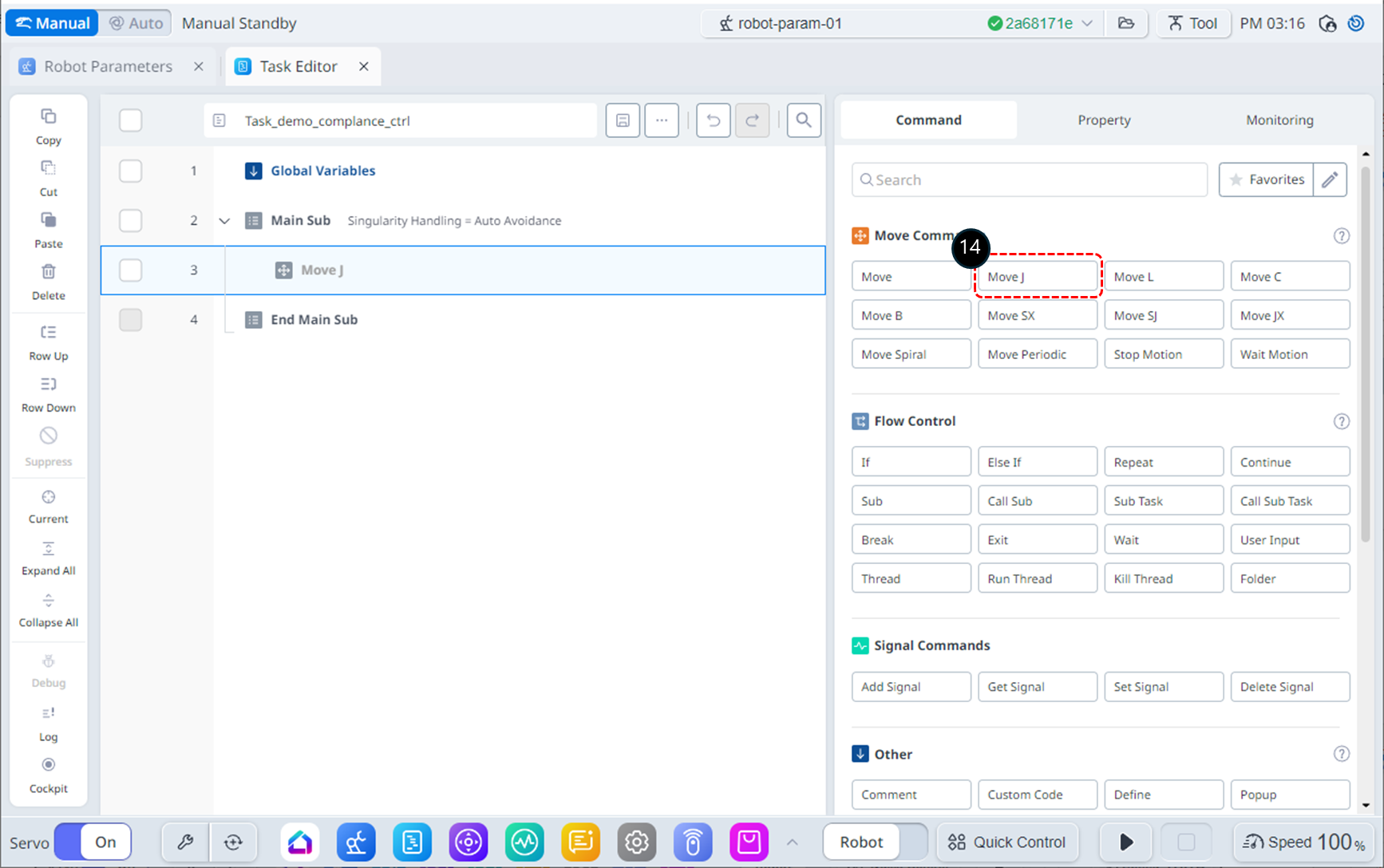
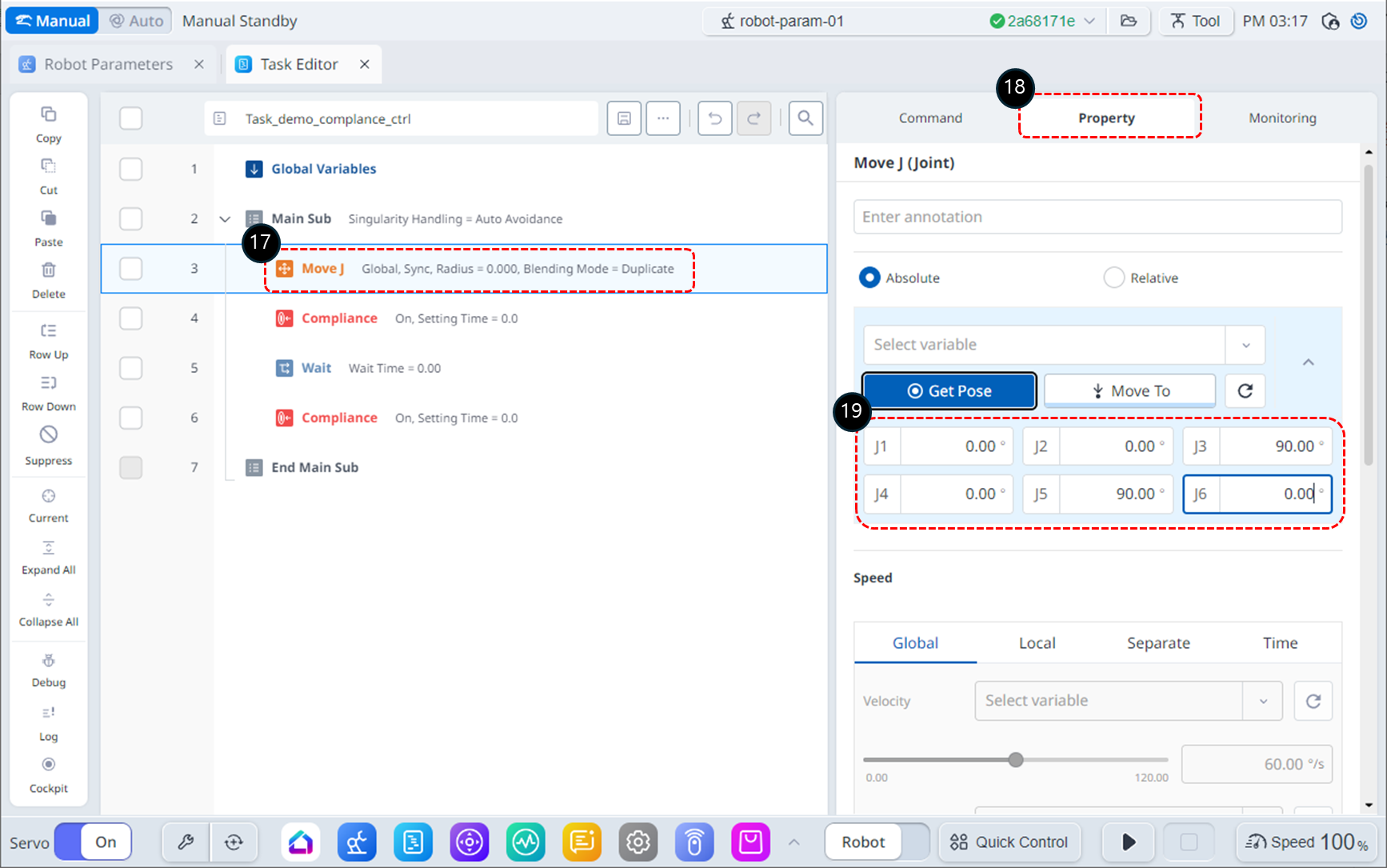
MoveJコマンドを追加します。このコマンドは、コンプライアンス制御のためにロボットを開始位置に移動するために使用されます。
-
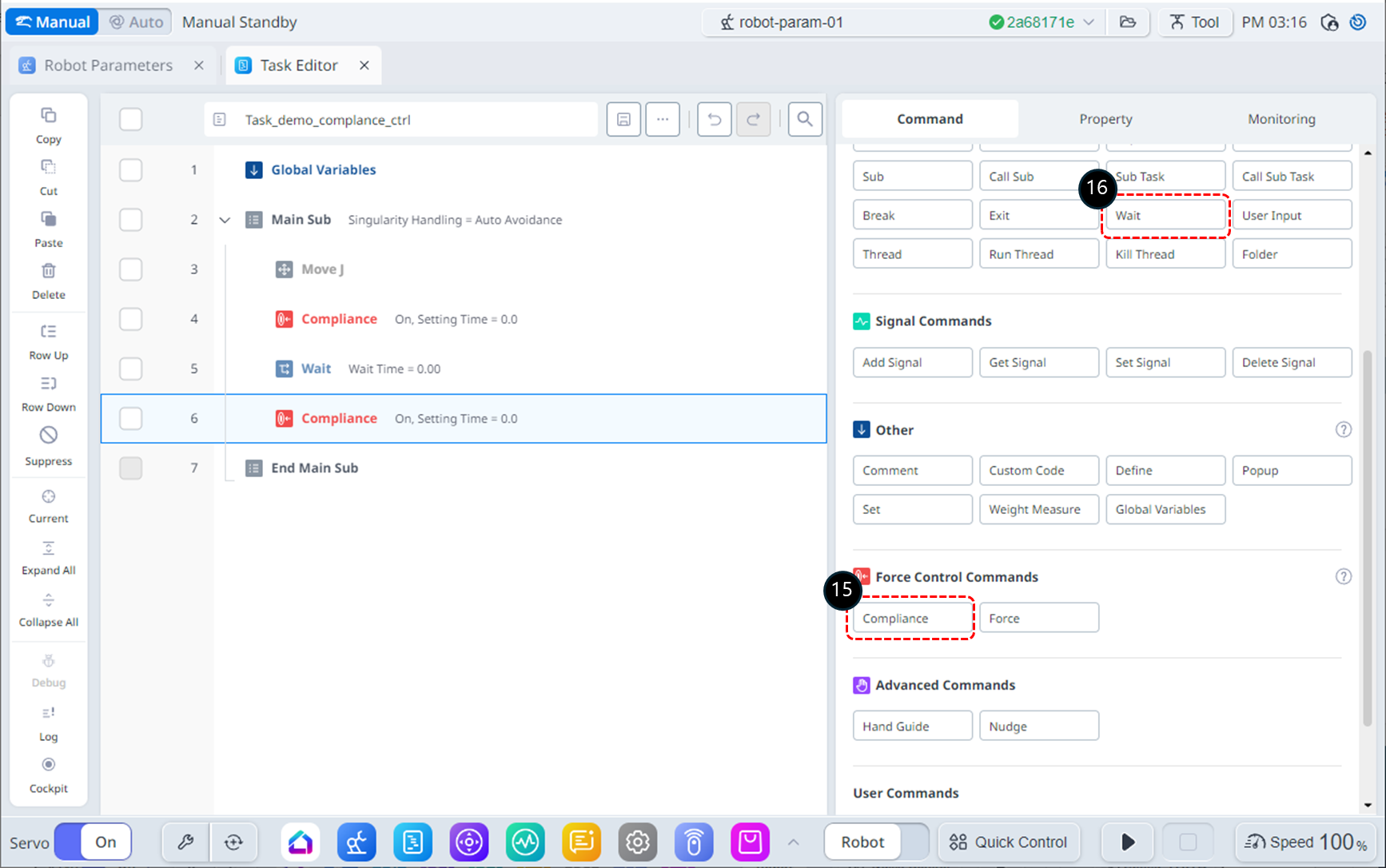
2つのコンプライアンスコマンドを追加します。これらのコマンドは、コンプライアンス制御を活動化および非活動化するために使用されます。
-
コンプライアンスコマンドの間に待機コマンドを挿入します。このwaitコマンドは、コンプライアンス制御を維持するために使用されます。
-
3行目でMoveJコマンドを選択します。
-
[プロパティ]タブを選択します。
-
MoveJのターゲット位置を(0,0,90,0,90, 0)度 ロボットの設置スペースに応じて、必要に応じてJ1の角度を調整できます。
-
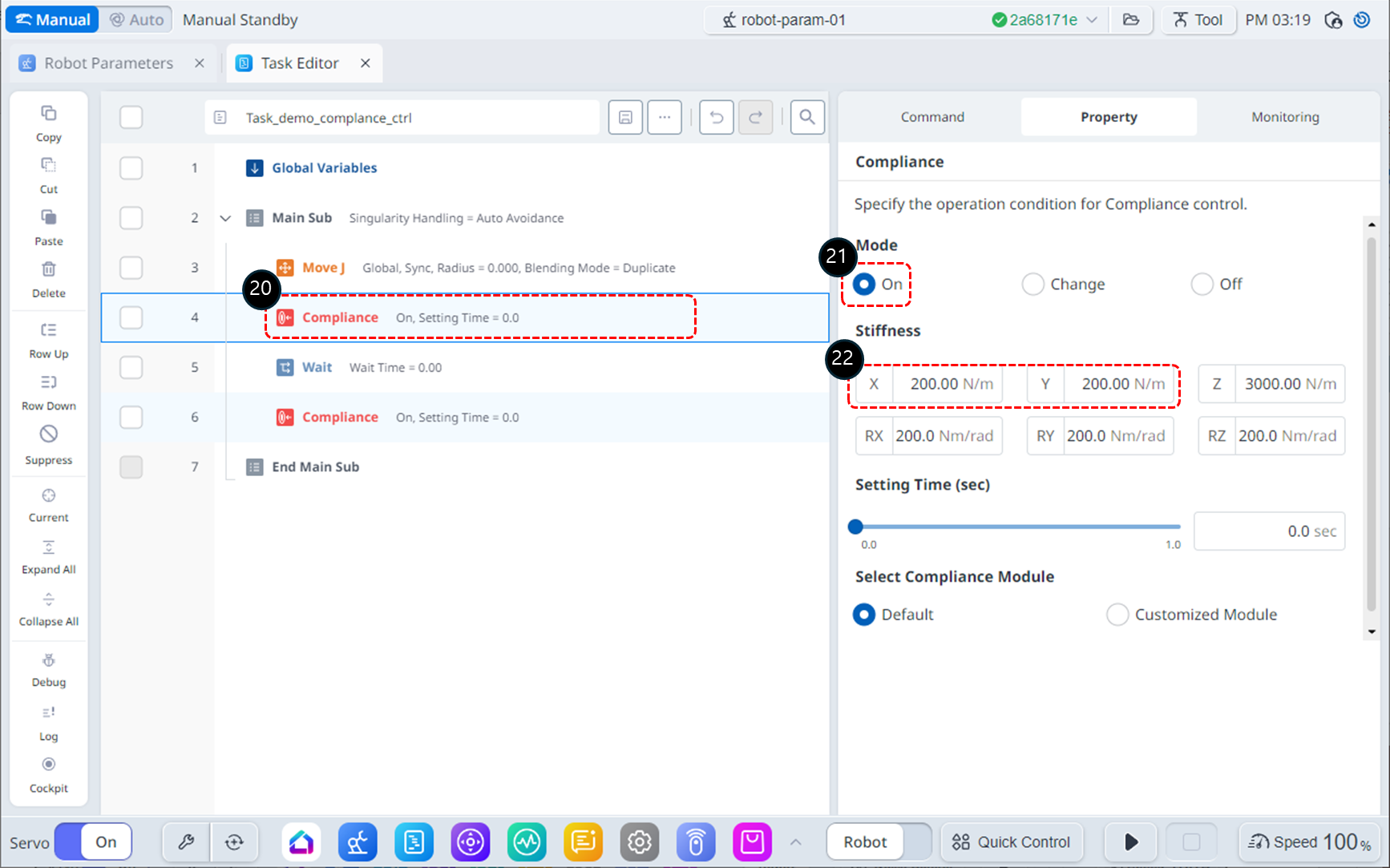
4行目でコンプライアンスコマンドを選択します。
-
[プロパティ]タブで、[モード]を次のように設定します。モードをオンにすると、コンプライアンス制御が有効になります。
-
モード:オン
-
-
剛性を次のように設定します。X方向とY方向の剛性を低くして、ロボットがこれらの方向によりソフトに反応するようにします。
-
X:200 N/m
-
Y : 200 N/m
-
Z : 3000 N/m(デフォルト)
-
Rx、Ry、Rz:200 Nm/rad(デフォルト)
-
-
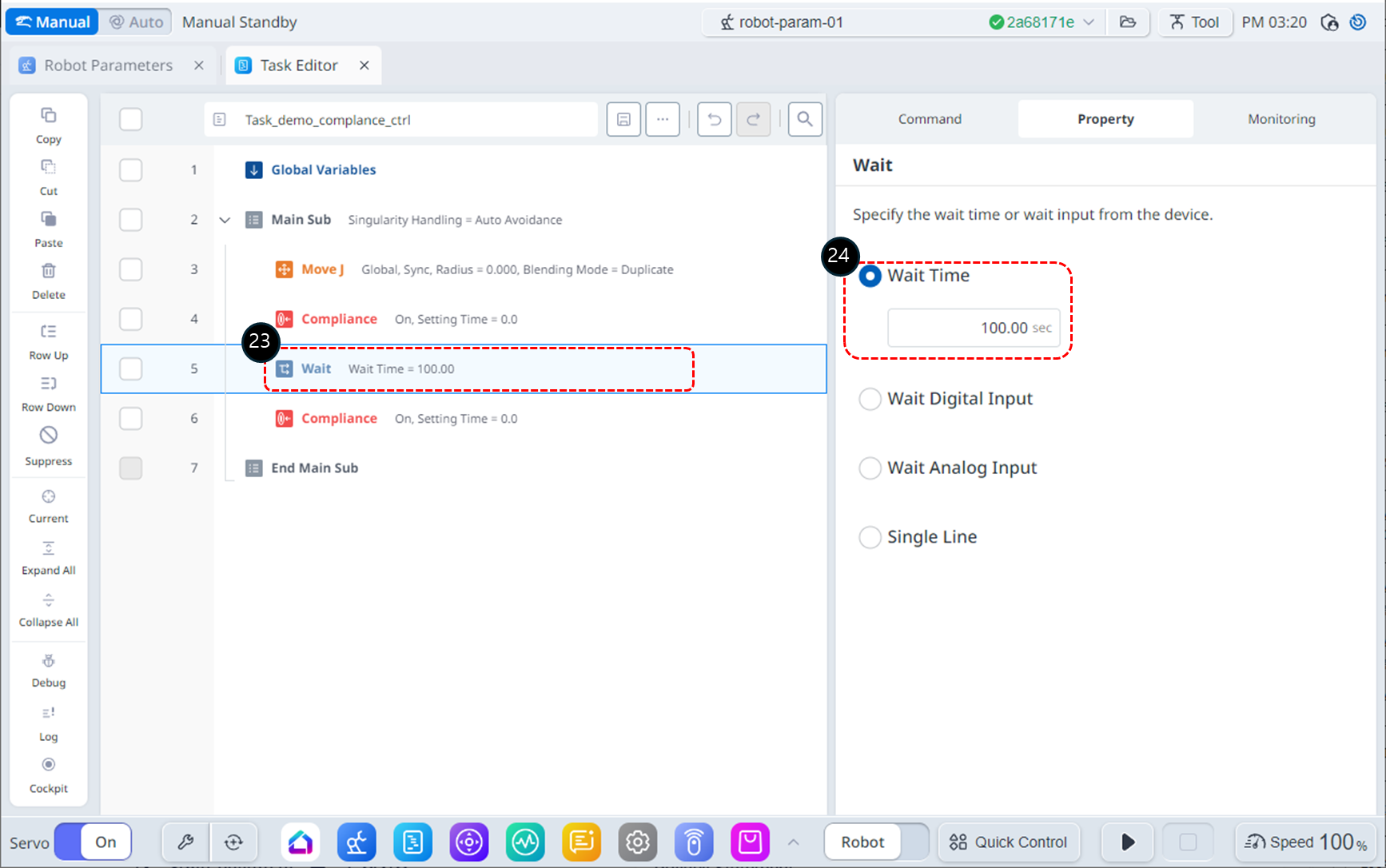
5行目のwaitコマンドを選択します。
-
待機時間を次のように設定します。
-
待機時間:100秒
-
-
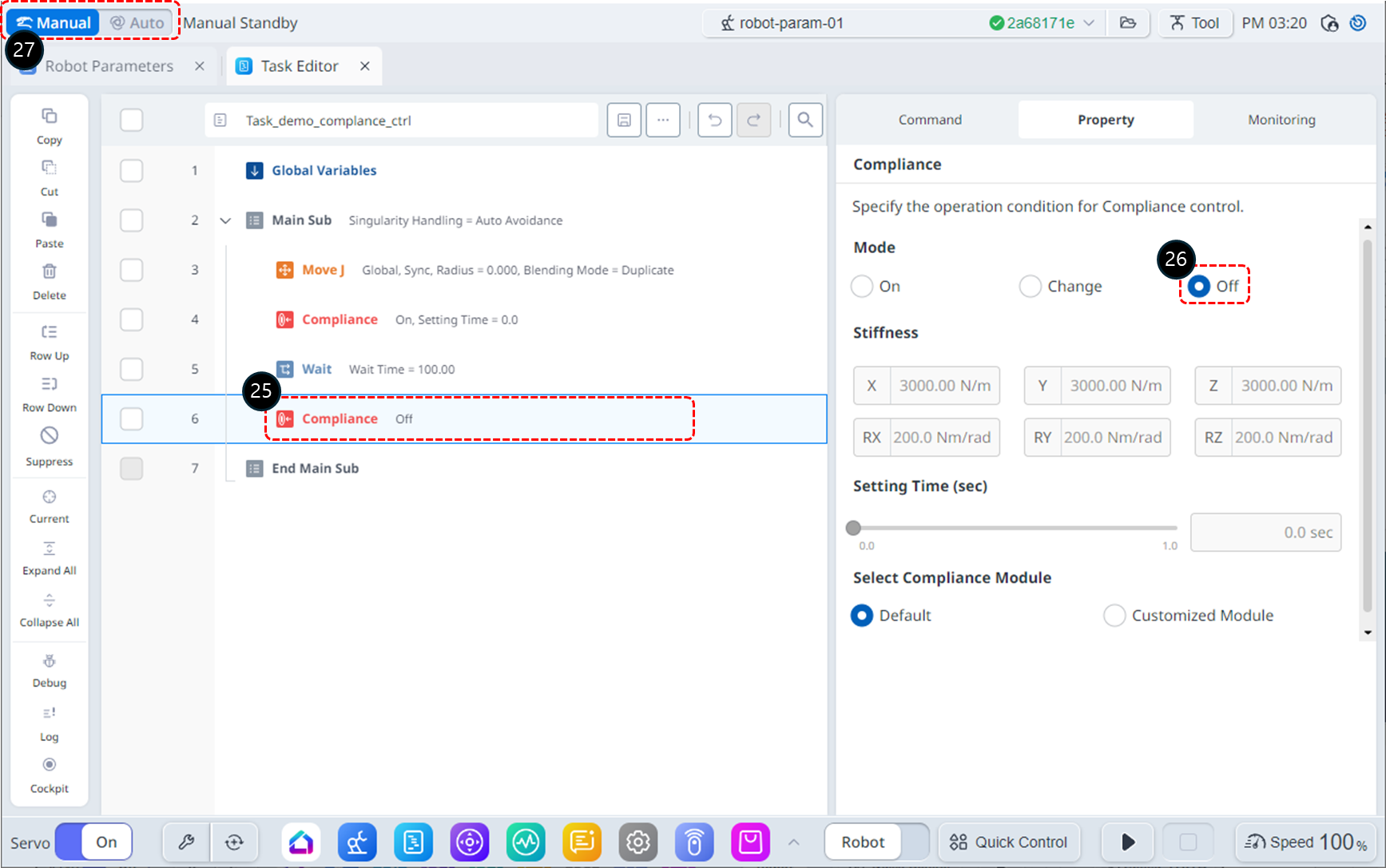
6行目でコンプライアンスコマンドを選択します。
-
[プロパティ]タブで、[モード]を次のように設定します。モードをオフにすると、コンプライアンス制御が無効になります。
-
モード:オフ
-
-
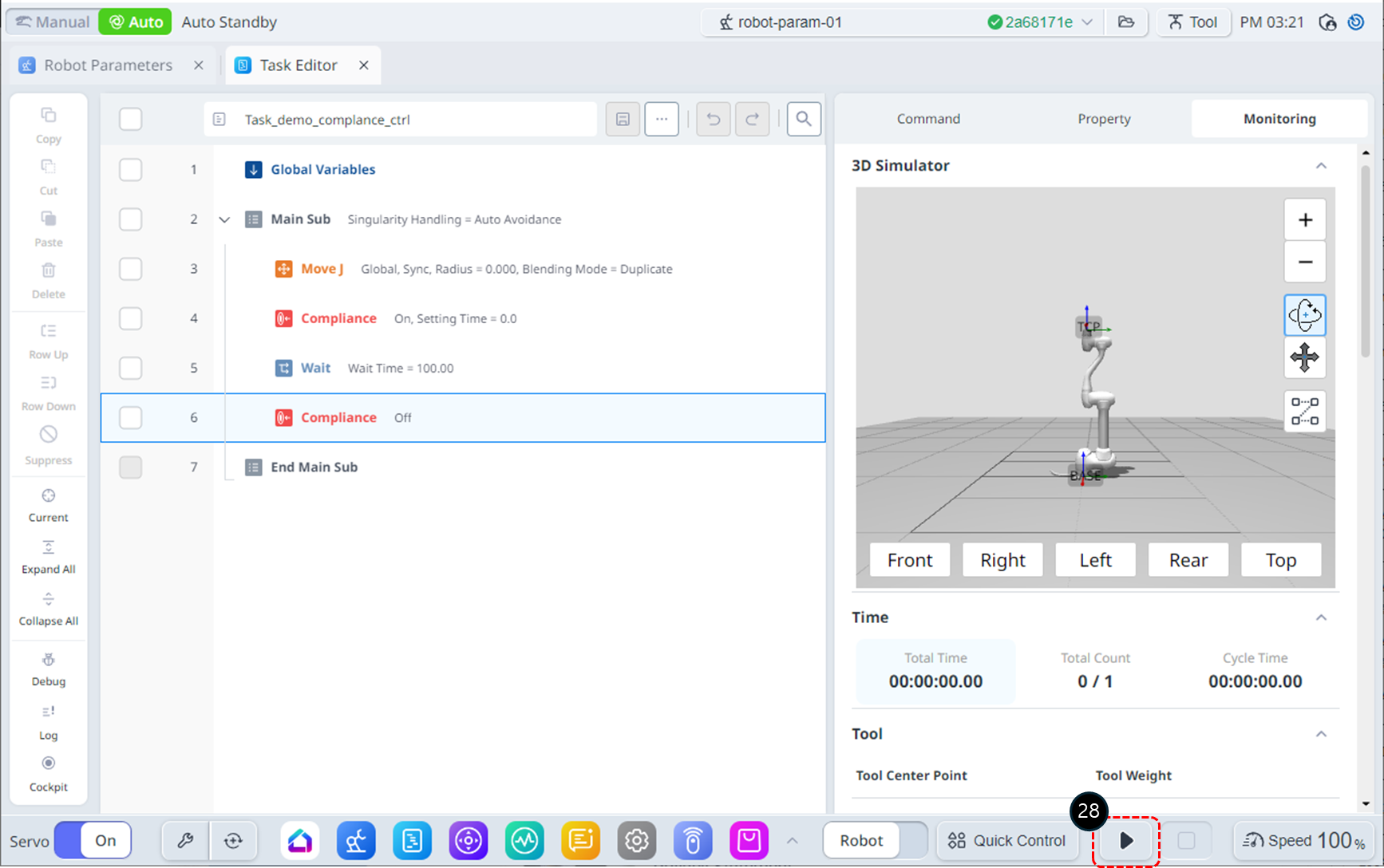
動作モードをAutoに変更します。[プロパティ]タブは自動的に[モニタリング]タブに切り替わります。
-
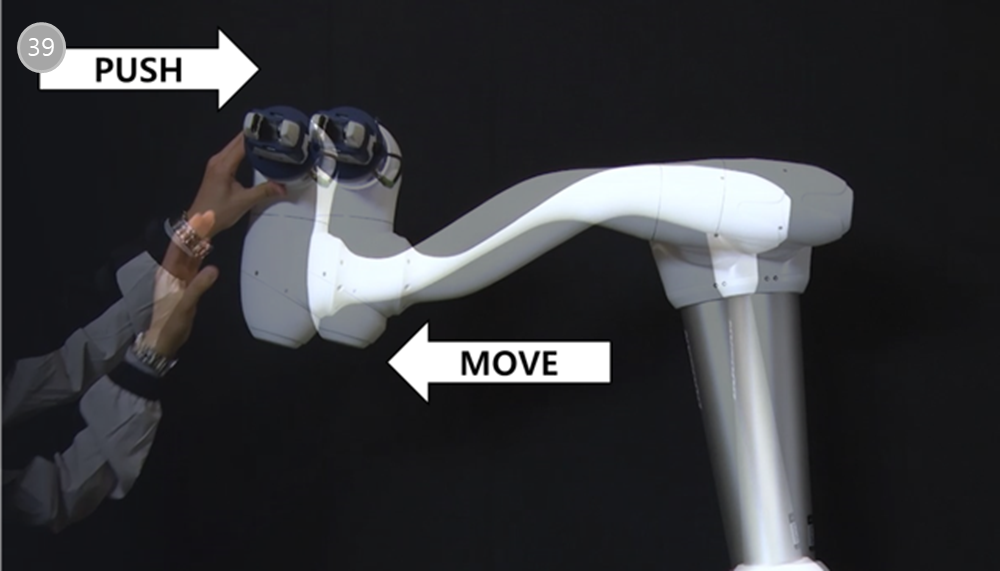
[実行]ボタンをクリックします。ロボットは開始位置に移動し、コンプライアンス制御を開始し、100秒間静止したままになります。この間、ロボットのエンドエフェクターをロボットの体に向かってゆっくり押します。ロボットは衝突エラー(またはTCP強制制限エラー)で停止します。衝突による安全停止状態では、ロボットのLEDは黄色で表示されます。
-
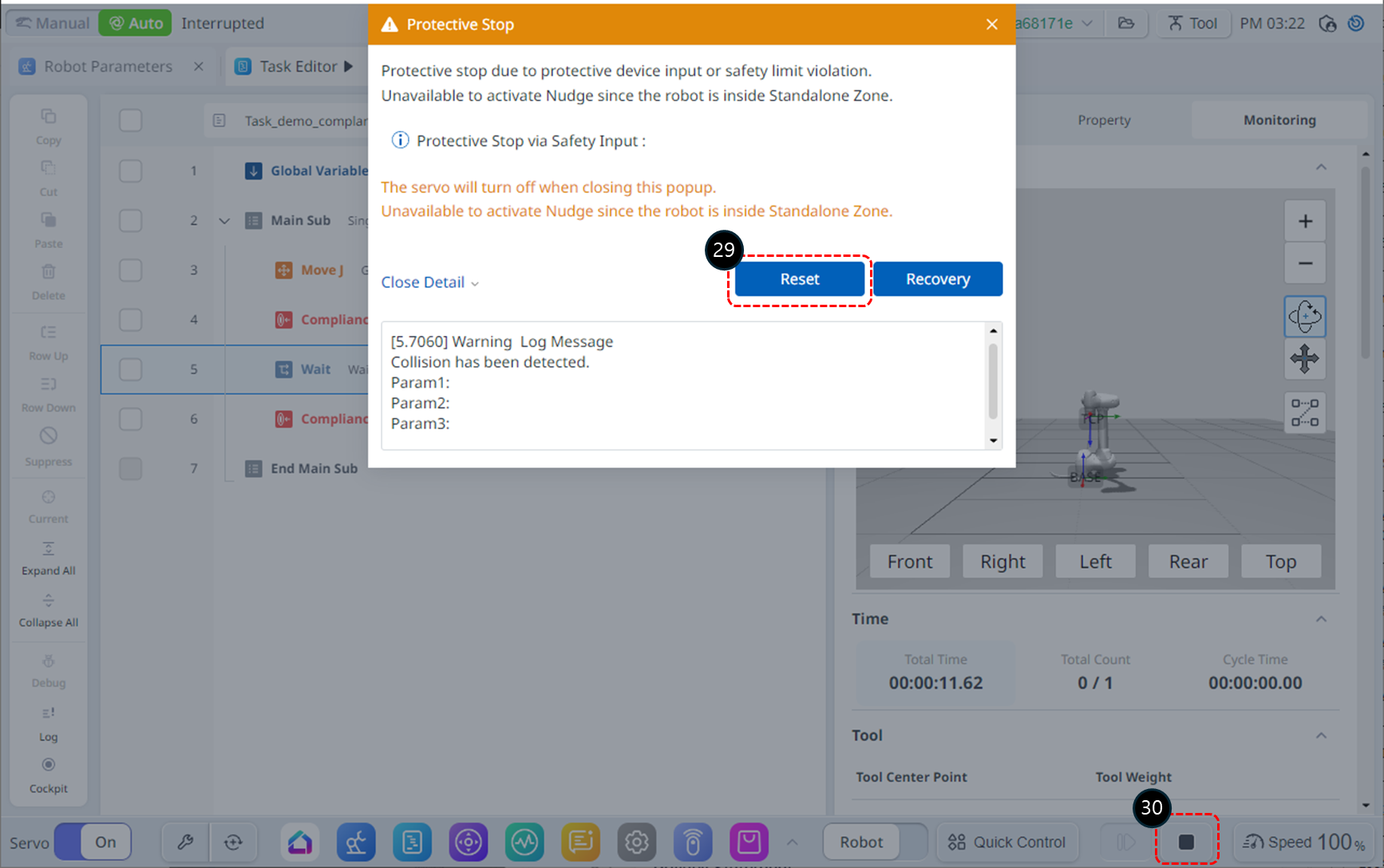
安全停止警告ウィンドウのリセットボタンをクリックします。タスクプログラムが操作を再開します。
-
[停止]ボタンをクリックしてプログラムを終了します。
-
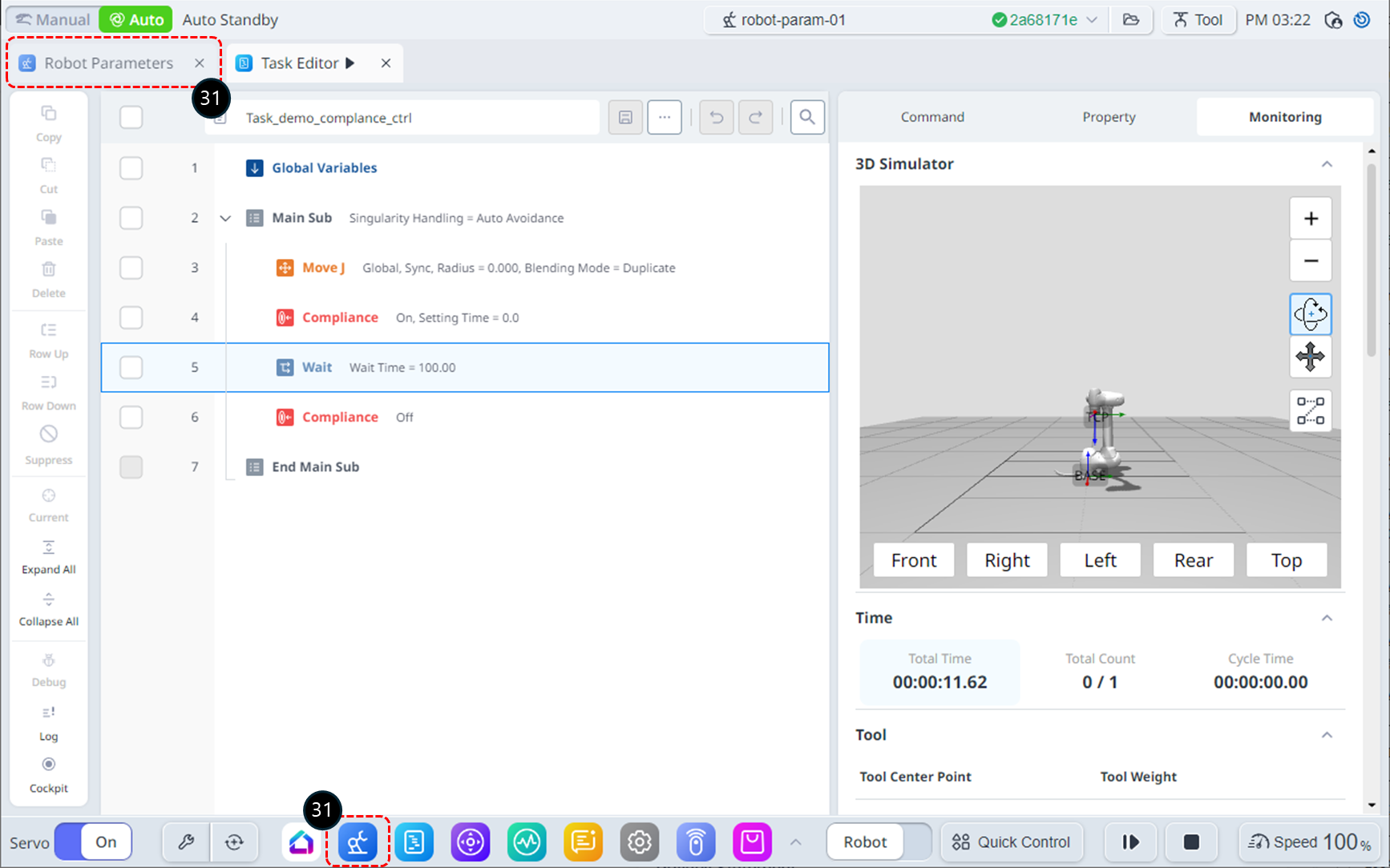
衝突の問題を解決するには、安全設定の衝突感度を下げる必要があります。(TCP Force Limitの問題がある場合は、TCP Forceパラメータを増やす必要があります)。下部メニューからロボットパラメータモジュールを選択します。または、左上隅にある[ロボットパラメータ(Robot Parameters)]モジュールタブを選択することもできます。これは同じ動作です。
-
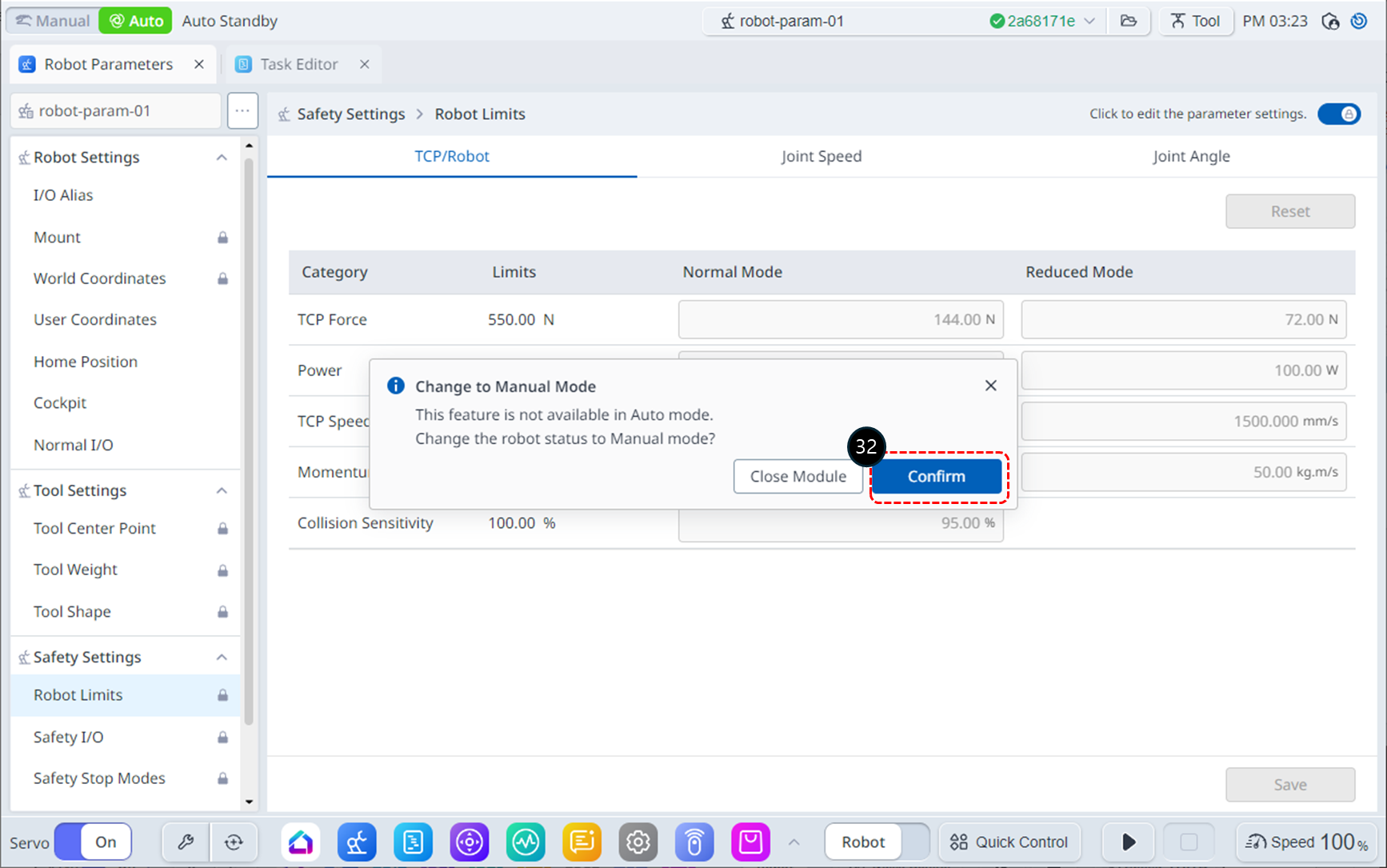
自動モードでは、Robot Parametersモジュールにアクセスすると通知ウィンドウが表示されます。確認ボタンをクリックして手動モードに切り替えます。
-
安全設定からロボット限界を選択します。
-
パラメータの編集状態を有効にします。パスワード入力ウィンドウが表示された場合は、手順6~7を参照してください。
-
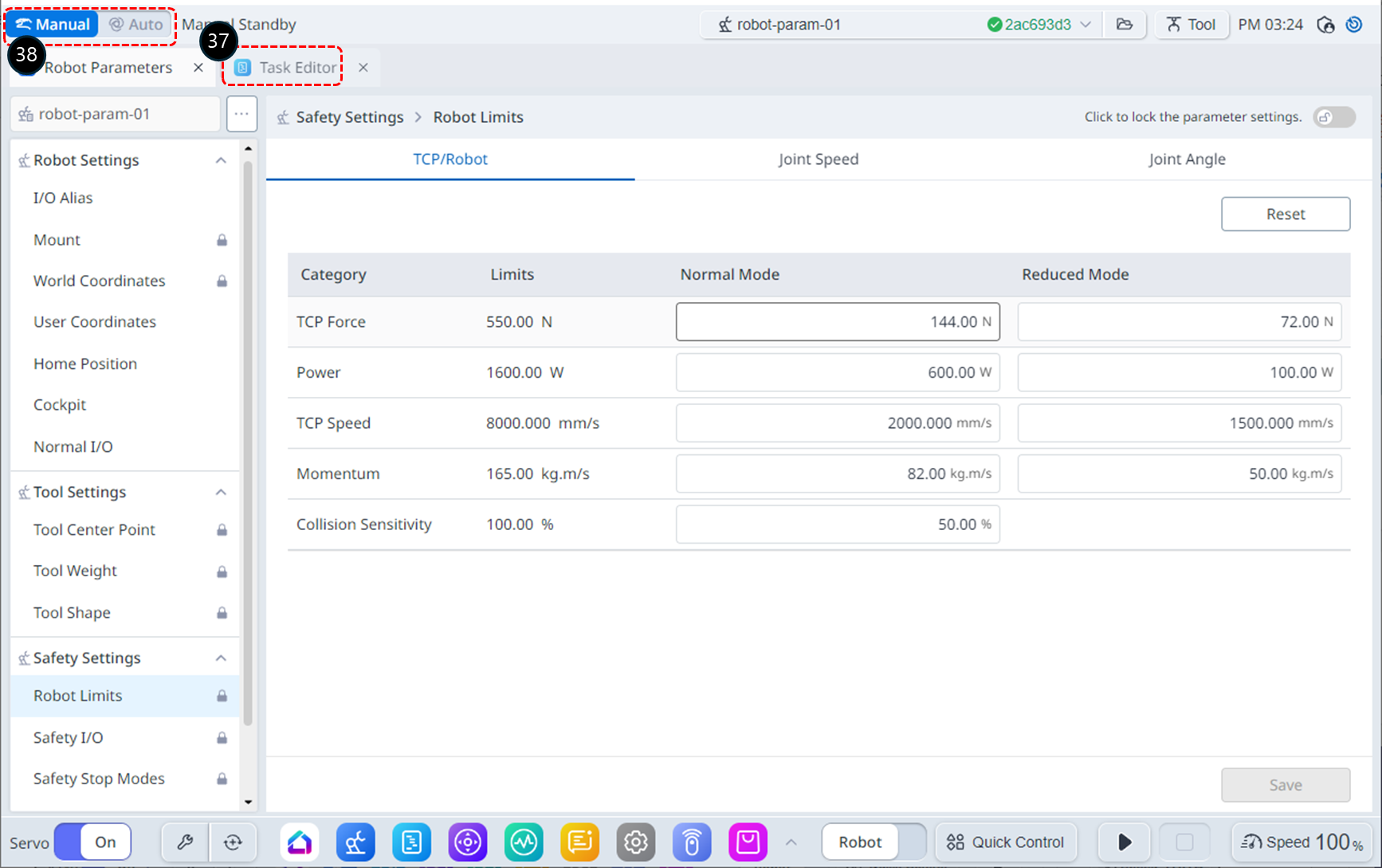
Collision Sensitivityを50%に変更します。
-
Saveボタンをクリックして設定を保存します。[ロボットパラメータレビュー(Robot Parameters Review)]ウィンドウが表示された場合は、修正内容を確認して[適用(Apply)]ボタンをクリック
-
[タスクエディタ]モジュールタブを選択します。
-
自動モードに切り替えてタスクプログラムを実行します。
-
[実行]ボタンをクリックします。待機時間中に、ロボットのエンドエフェクターをロボットの体に向かって静かに押します。押す力でロボットが動き、手を離すと元の位置に戻ります。