
安全接点入力用端子ブロックの設定 (TBSFT)
コントローラの安全I/Oは、安全装置を接続するための冗長専用接点入力端子で構成されています。これらの端子は、用途に応じて2つのグループに分類されます。
下部に2組の外部緊急接続があります。外部緊急スイッチなどの緊急停止に必要なデバイスを接続するために使用します。
上部の2組の保護装置接点ライトカーテンや安全マットなどの保護停止装置を接続するために使用されます。
外部安全装置を接続せずにこれを使用する場合は、各接点入力を次のように接続します。
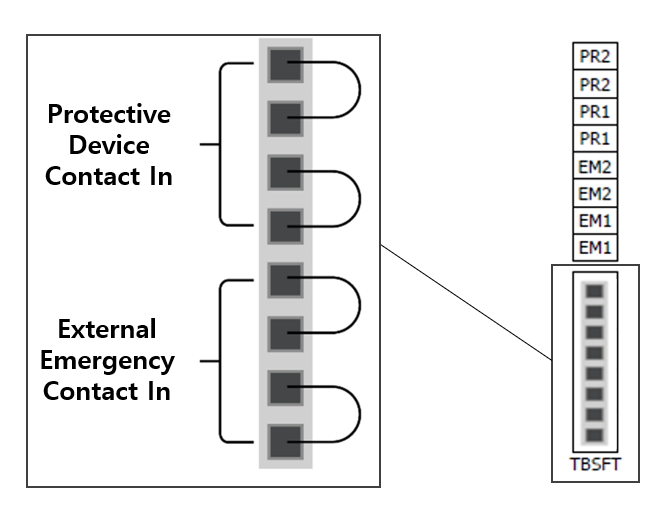
4つの接点入力すべてが通常閉であるノーマルクローズ接点ステータスに応じて、#safety controller#によって認識される外部安全装置信号は次のとおりです。
連絡先のステータス | EM1 contact | EM2 contact | PR1 contact | PR2 contact |
|---|---|---|---|---|
閉じる (Close) | 標準 | 標準 | 標準 | 標準 |
開く (Open) | 緊急停止 | 緊急停止 | 保護停止 | 保護停止 |
警告
安全信号は、安全PLCではない通常のPLCに接続しないこと。これを怠ると、安全停止機能が不適切に動作し、重傷や死亡事故につながるおそれがあります。
いずれかの接点が開いている場合、ロボットは安全停止モードの設定に従って動作を停止し、TBSFTの右側のLEDが点灯します。EMGA(赤)、EMGB(赤)、PRDA(黄)、PRDB(黄)
注記
EMGA:緊急停止チャネルA(EM1)LED
EMGB:緊急停止チャネルB(EM2)LED
PRDA:保護停止チャネルA(PR1)LED
PRDB:保護停止チャネルB(PR2)LED
注意
接続損失や接続不足を確認するには、安全信号を接点として出力する装置にこの端子を接続する必要があります。安全信号を電圧として出力する周辺機器を安全コントローラに接続するには、 コンフィグレーション可能デジタルI/Oブロック (TBCI1-4、TBCO1-4)を参照。