
Schermata modalità reale: Scheda dati terminale
La schermata della modalità reale (scheda dati terminale) del Task Builder è configurata come segue:
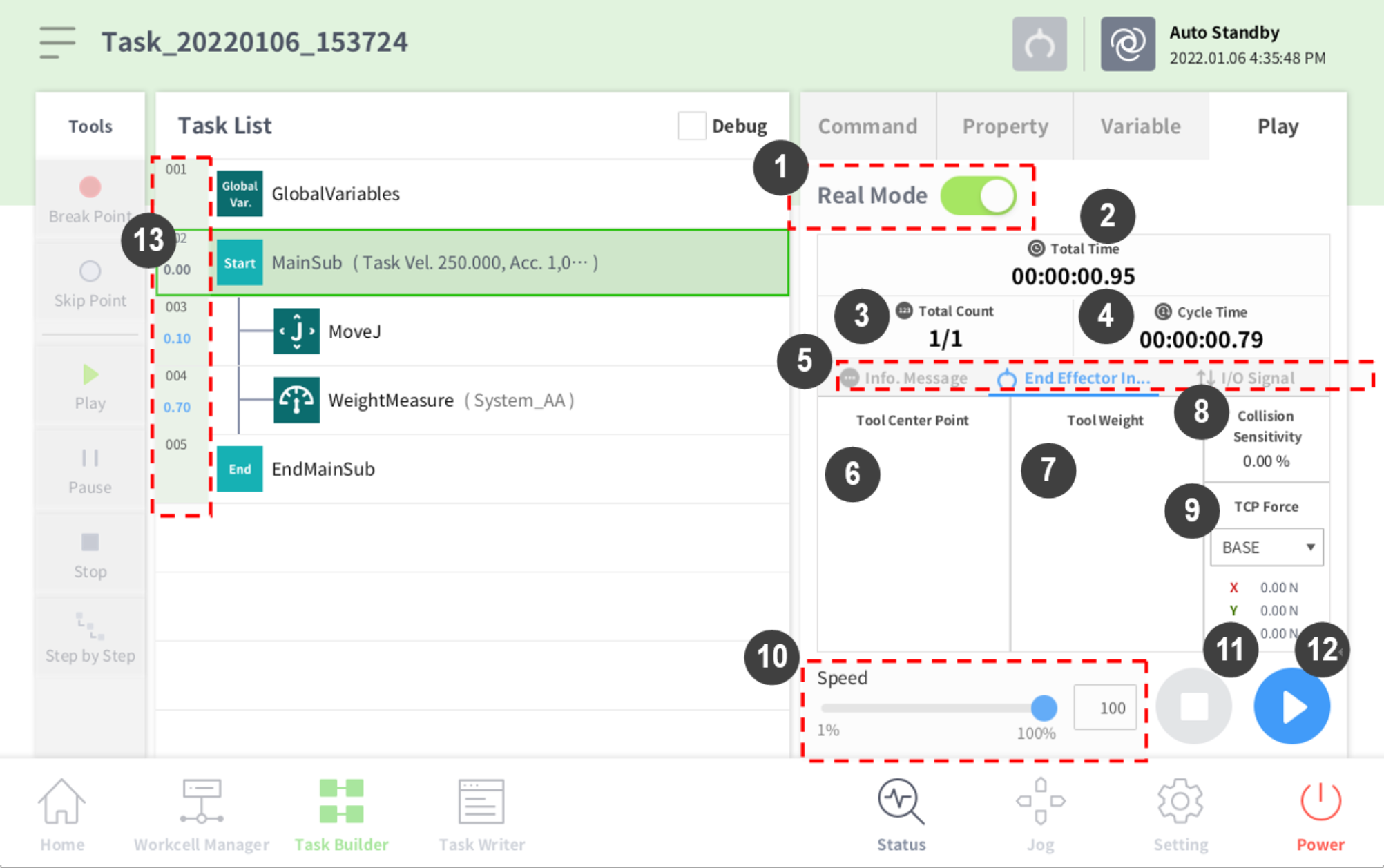
N. | Voce | Descrizione |
1 | Real Mode ( | Imposta la modalità di esecuzione del test del robot.
|
2 | Total time | Visualizza il tempo totale trascorso dall'esecuzione dell'attività. |
3 | Total count | Visualizza il numero totale di volte che l'attività è stata eseguita. |
4 | Average execution time | Visualizza il tempo medio trascorso nell'esecuzione di un ciclo dell'attività presa dalla lista. |
5 | Information Screen Shift Tab | È possibile alternare tra la schermata dei Informazione Messaggio del robot, la schermata delle informazioni sull'effettore finale e la schermata delle informazioni di input/output.
|
6 | Tool center point information area | Visualizza i dati relativi al tool center point configurati attraverso il tool center point e le funzioni di configurazione del peso del comando TCP impostato o del jog. |
7 | Tool weight information | Visualizza i dati relativi al peso dell'utensile configurati attraverso il tool center point e le funzioni di configurazione del peso del comando TCP impostato o del jog. |
8 | Collision information area | Visualizza il valore di sensibilità alle collisioni impostato per l'area nella quale il robot è attualmente posizionato. |
9 | Force information area | Visualizza i dati sulla forza nei sistemi di coordinate Base, Mondo, Utente e Riferimento. Il sistema di coordinate di riferimento visualizza la forza in base ai dati nel sistema di coordinate applicato al robot. |
10 | Speed slider | Imposta la velocità del robot in modalità reale o virtuale. |
11 | Stop button | Interrompe l'attività in corso. |
12 | Execute/pause toggle button | Esegue o mette in pausa l'attività presa dall'elenco. |
13 | Time | Visualizza il tempo trascorso nell'esecuzione del comando/abilità corrispondente. |

Attenzione
- Prima di eseguire un'attività, eseguirla in modalità virtuale per verificare se funziona come previsto.
- Si raccomanda di testare il programma del robot designando waypoint temporanei al di fuori dello spazio operativo di un'altra macchina. Doosan Robotics non sarà ritenuta responsabile per danni causati da errori di programmazione o malfunzionamenti del robot, nonché da danni all'apparecchiatura.
- Il pulsante di arresto di emergenza si trova sulla Teach pendant (console portatile). In una situazione di emergenza, premere il pulsante di arresto di emergenza per arrestare il robot.
Nel caso dei modelli privi di Force Toque Sensor, i valori (X, Y, Z) della forza non vengono monitorati.