Questo pulsante può essere utilizzato per regolare o modificare la posizione del robot.
2,3
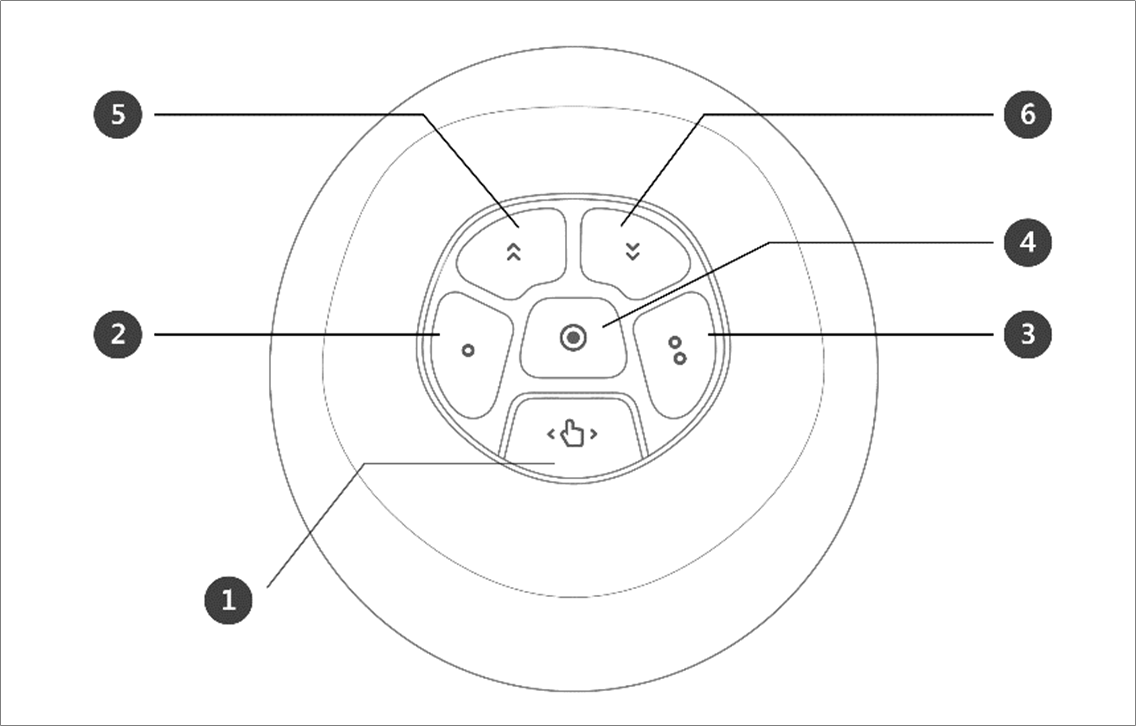
User Setting Button
Questo pulsante consente di modificare la posizione del robot inserendo una posizione in base ad una condizione di blocco corrispondente ad una modalità.
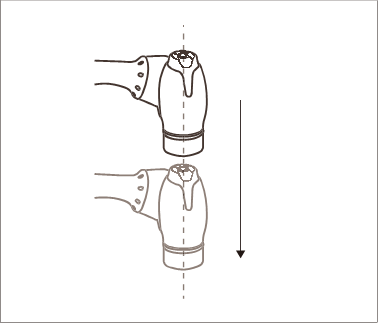
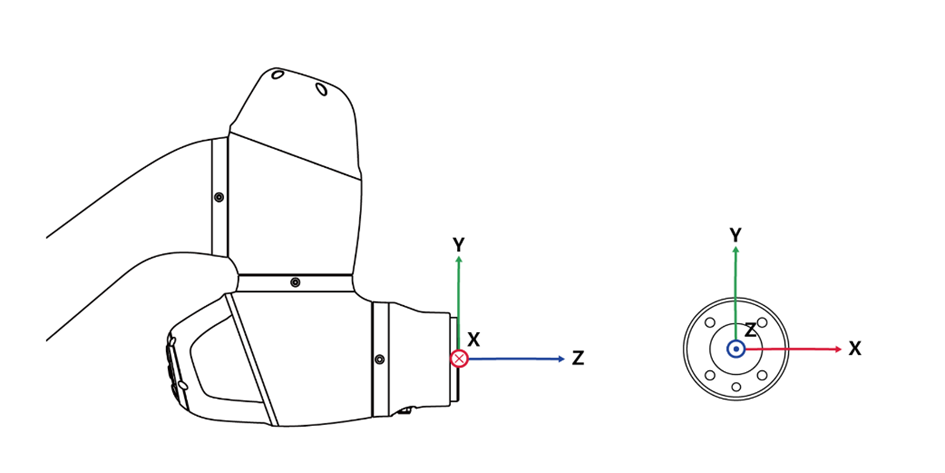
Blocco asse: Modifica la posizione in base all'asse Z nel sistema di coordinate dell'utensile
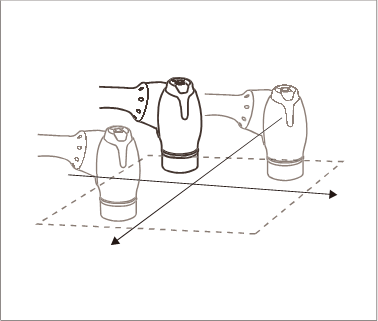
Blocco superficie: Modifica la posizione in base alla superficie X-Y nel sistema di coordinate coordinate dell'utensile
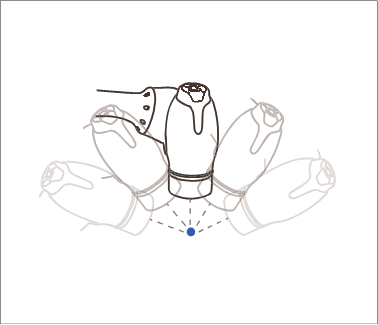
Blocco punto: Modifica l'angolo unicamente in base al punto di riferimento nel sistema di coordinate dell'utensile
Blocco angolo: Modifica la posizione unicamente con angolazione del TCP corrente bloccata
Sposta il Focus visualizzato sullo schermo di una riga verso l'alto
6
One Line Down
Sposta il Focus visualizzato sullo schermo di una riga verso il basso
Nota – Modifica impostazione Cockpit
La modifica delle impostazioni del pulsante di pre-azionamento edei pulsanti dei limiti di movimento richiede 0,2 secondi.
Premendo il pulsante Save Pose (Salva posizione) nella schermata Skill Setting (Impostazione abilità) si sposta automaticamente l'attenzione sulla posizione successiva.
Il pulsante Cancel (Annulla) può essere utilizzato solo nella schermata Skill Setting che gestisce più posizioni.
Attenzione
I modelli serie A senza FTS (A0509, A0912) non possono utilizzare il movimento prefissato.
I modelli serie A con FTS (A0509S, A0912S) possono utilizzare il movimento prefissato.
Il movimento prefissato si basa sull'FTS fissato all'estremità del robot; pertanto, è essenziale fissare l'utensile e per il robot afferrarlo quando si muove. Il movimento con trattenuta del corpo potrebbe non attivare alcuna reazione del robot.