Provare a forzare esempi di comandi
OPZIONALE NORMALE 20 MIN

Questo esempio viene creato in Task Writer. Questo esempio può essere provato quasi nello stesso modo in Task Builder.
Attenzione
- Prima di provare il campione, leggere e seguire Precauzioni per l'uso. Per ulteriori informazioni, fare riferimento PARTE 1. Manuale di sicurezzaa .
- Questo esempio richiede il file Task Writer creato in Prova esempi di comandi di conformità.
- Prova esempi di comandi di conformità Aprire il file Task Writer creato e selezionare il comando di conformità sulla quarta riga dell'elenco delle attività.
- Selezionare la scheda Proprietà.
- Impostare la modalità come segue: La modalità ON consente il controllo della conformità. Il comando forza è disponibile solo quando è abilitato il controllo di conformità.
- Modalità: Acceso
- Impostare il valore di rigidità di default nel modo seguente:
- X, Y, Z: 3000 N/m (impostazione predefinita)
- Rx, Ry, Rz: 200 Nm/rad (impostazione predefinita)
- Premere il pulsante Conferma.
- Selezionare la scheda comando.
- Aggiungere un comando di forza. Questo comando è progettato per essere utilizzato per abilitare il controllo della forza.
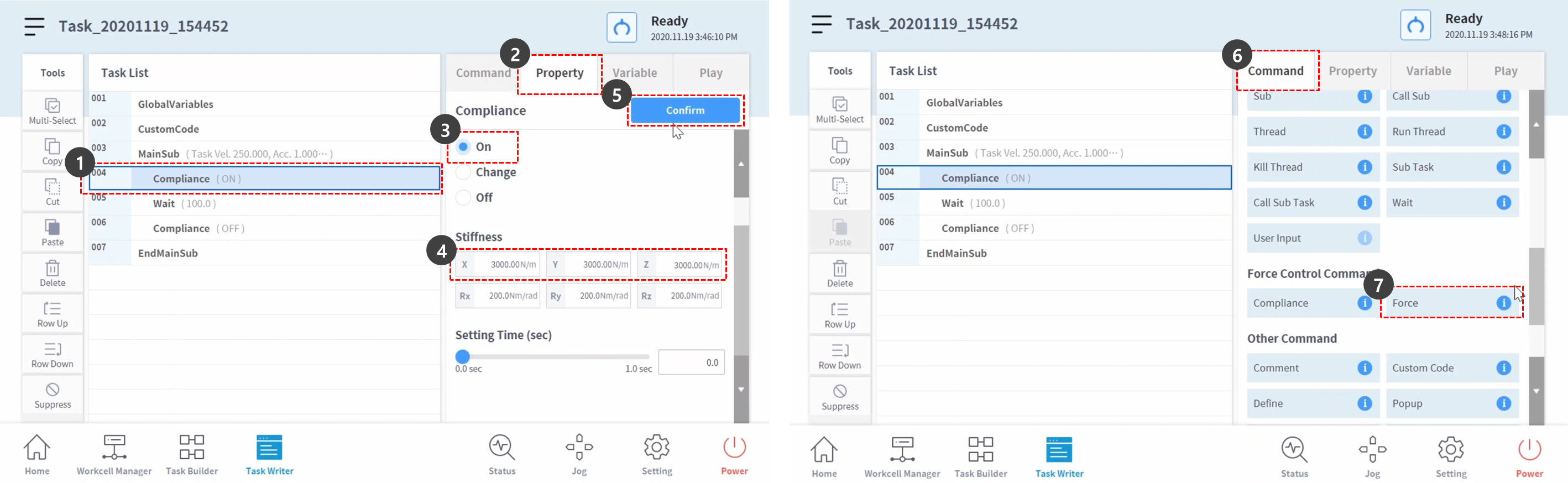
- Selezionare la sesta riga dell'elenco delle attività.
- Aggiungere un comando di forza. Questo comando è progettato per essere utilizzato per disattivare il controllo della forza.
- Selezionare il comando forza dalla quinta riga dell'elenco delle attività.
- Selezionare la scheda Proprietà.
- Impostare la modalità come segue: La modalità ON attiva il controllo della forza.
- Modalità: Acceso
- Impostare la forza desiderata come segue:
- X: 0 N (impostazione predefinita)
- Y: 0 N (impostazione predefinita)
- Z: -10 N.
- Rx, Ry, Rz: 200 Nm/rad (impostazione predefinita)
- Selezionare solo asse Z nella direzione di destinazione.
- Premere il pulsante Conferma.
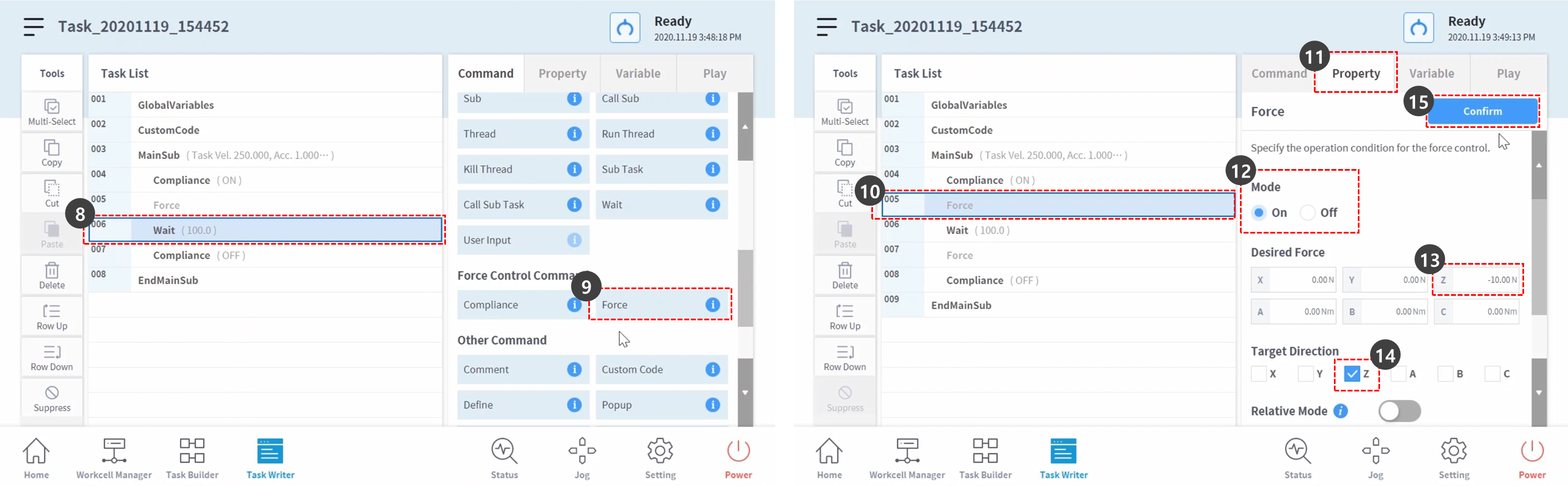
- Selezionare il comando forza dalla settima riga dell'elenco delle attività.
- Impostare la modalità come segue: La modalità disattivata disattiva il controllo della forza.
- Modalità: Spento
- Premere il pulsante Conferma.
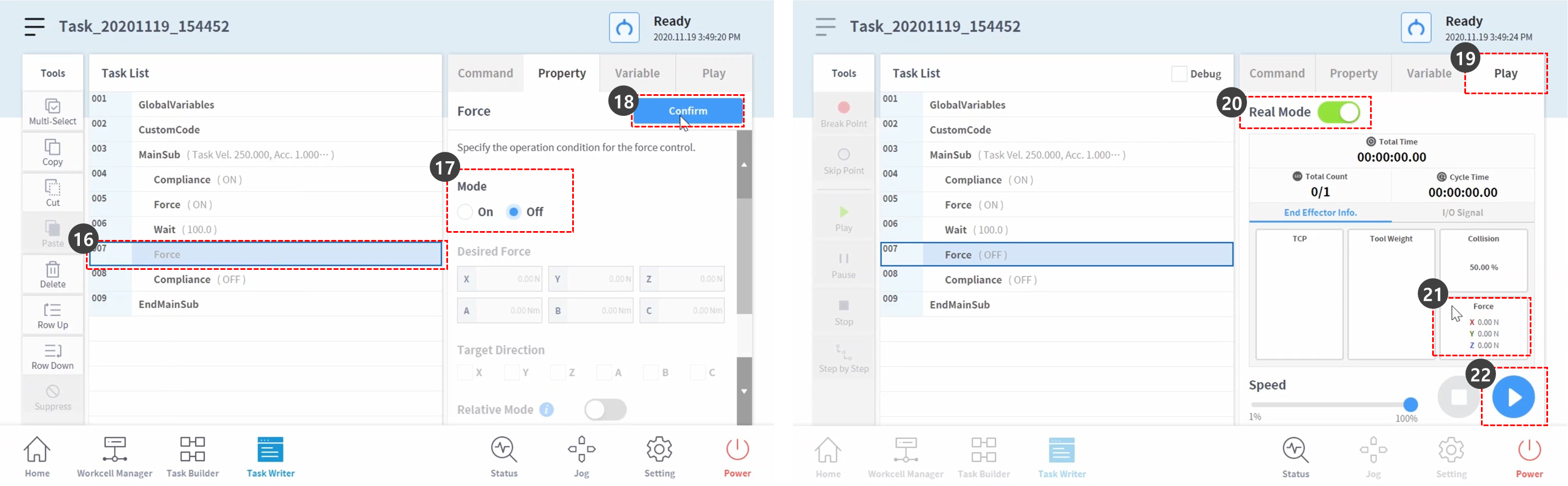
- Selezionare la scheda Riproduci.
- Attivare il pulsante di commutazione modalità reale.
- Una volta attivato il pulsante di attivazione/disattivazione, il pulsante si illumina in verde.
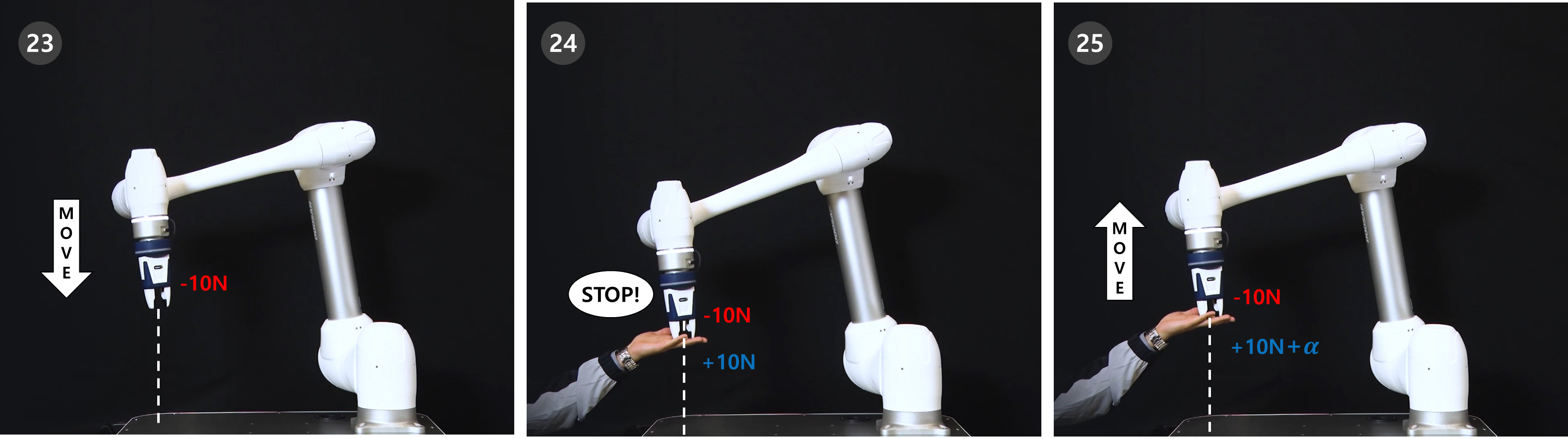
- Verificare che la forza TCP di ciascun asse sia 0. Questo valore di forza è la dimensione della forza esterna attualmente applicata sul TCP di estremità del robot.
- Premere il pulsante Riproduci.
- -10N di forza viene applicata sul TCP di estremità del robot causando il movimento lento del robot nella direzione dell'asse Z.
- L'estremità del robot respinge il movimento del robot nella direzione dell'asse +Z, opposta alla direzione del movimento del robot. Quando la forza che sposta il robot e il movimento del robot che respinge la forza raggiunge un equilibrio, il robot manterrà la sua posizione come se si arrestasse.
- Se sul robot viene applicata una forza superiore a +10N, il robot si adeguerà alla forza applicata sul robot e si sposterà nella direzione della forza.