Prova esempi di comandi di conformità
OPZIONALE NORMALE 20 MIN

Questo esempio viene creato in Task Writer. Questo esempio può essere provato quasi nello stesso modo in Task Builder.
Attenzione
- Prima di provare il campione, leggere e seguire Precauzioni per l'uso. Per ulteriori informazioni, fare riferimento PARTE 1. Manuale di sicurezzaa .
Nota
- Se è presente una coppia esterna di 15Nm o superiore quando si attiva o disattiva il controllo di conformità, il robot arresta il programma a causa dell'errore JTS (Joint Torque Sensor, sensore di coppia del giunto).
- La modifica della rigidità può essere eseguita indipendentemente dalla dimensione della coppia esterna.
- Durante il controllo di conformità, non è possibile eseguire movimenti congiunti, come il comando MoveJ.
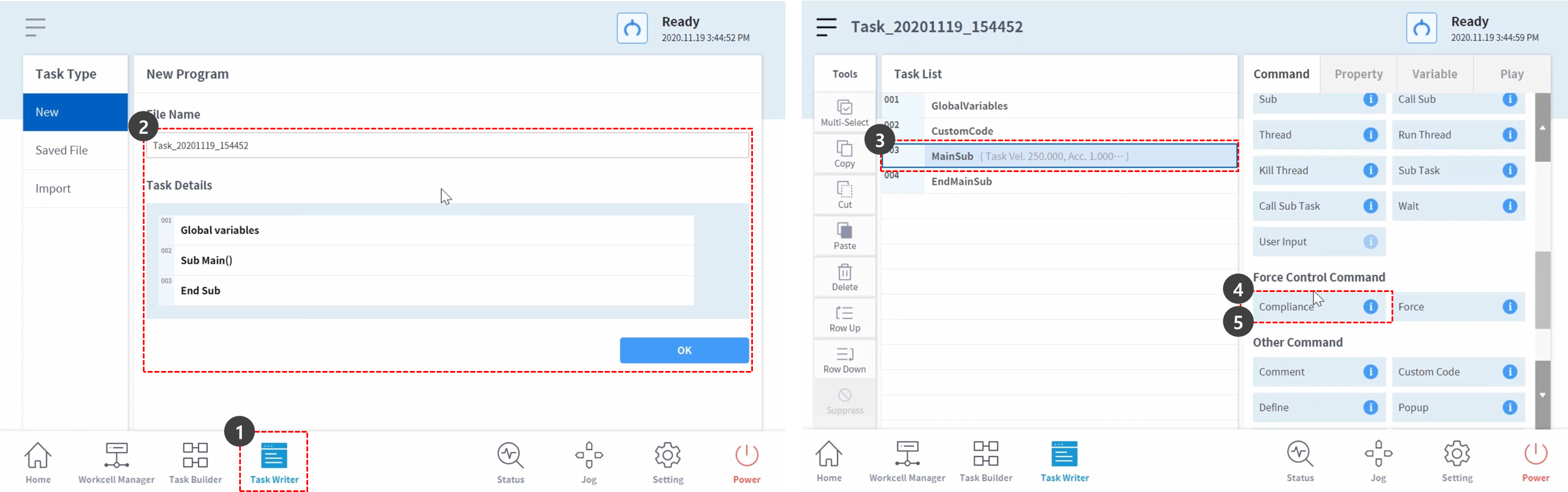
- Selezionare Task Writer dal menu in basso.
- Immettere il nome dell'attività e premere il pulsante OK.
- Selezionare il comando MainSub dalla terza riga dell'elenco di attività. Un nuovo comando viene aggiunto alla riga successiva della riga selezionata.
- Aggiungi comando conformità. Questo comando è previsto per l'attivazione del controllo di conformità.
- Aggiungere un altro controllo di conformità. Questo comando è previsto per la disattivazione del controllo conformità.
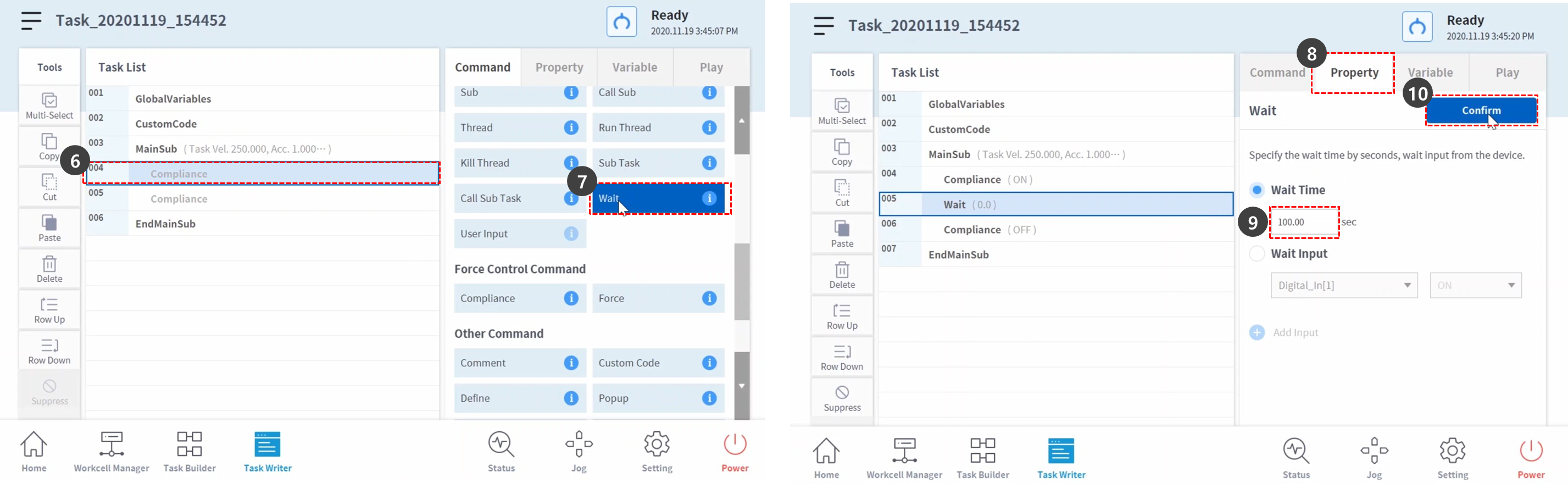
- Selezionare il comando di conformità sulla quarta riga. Un nuovo comando viene aggiunto alla riga successiva della riga selezionata.
- Aggiungi comando di attesa.
- Selezionare la scheda Proprietà.
- Impostare il tempo di attesa come segue:
- Tempo di attesa: 100 sec.
- Premere il pulsante Conferma.
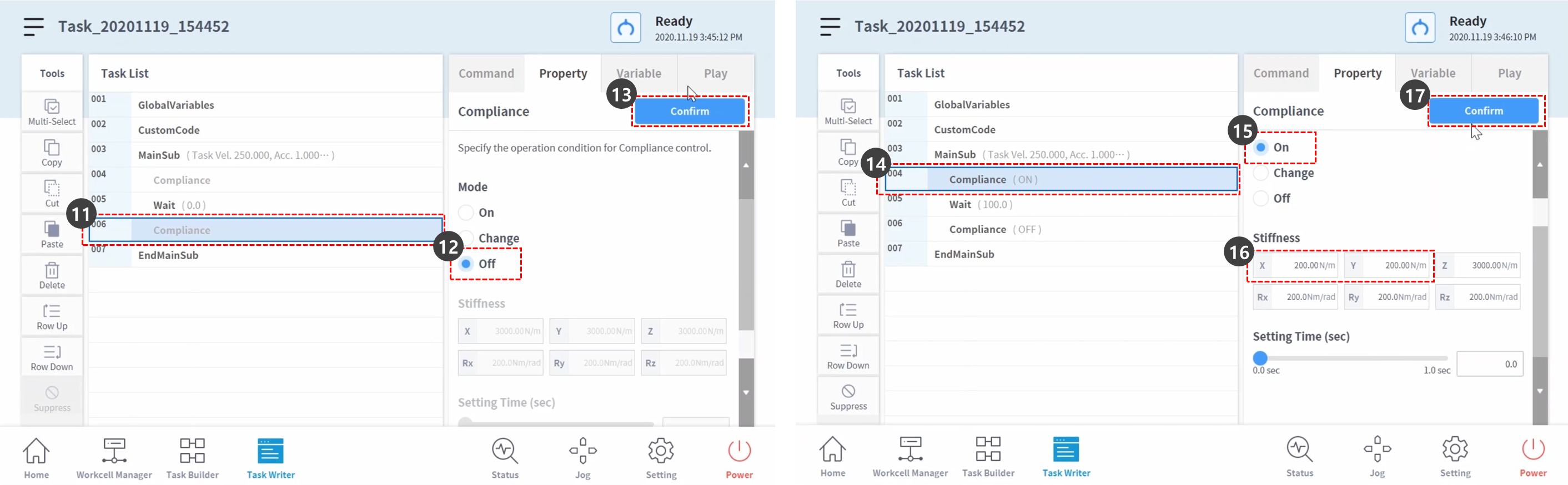
- Selezionare il comando di conformità sulla sesta riga.
- Impostare la modalità nella proprietà come segue: La modalità disattivata disattiva il controllo di conformità.
- Modalità: Spento
- Premere il pulsante Conferma.
- Selezionare il comando di conformità sulla quarta riga.
- Impostare la modalità nella proprietà come segue: La modalità ON attiva il controllo di conformità.
- Modalità: Acceso
- Impostare la rigidità come segue: Ridurre la rigidità delle direzioni X e Y per reazioni più morbide nelle direzioni X e Y.
- X: 200 N/m.
- Y: 200 N/m.
- Z: 3000 N/m (impostazione predefinita)
- Rx, Ry, Rz: 200 Nm/rad (impostazione predefinita)
- Premere il pulsante Conferma.
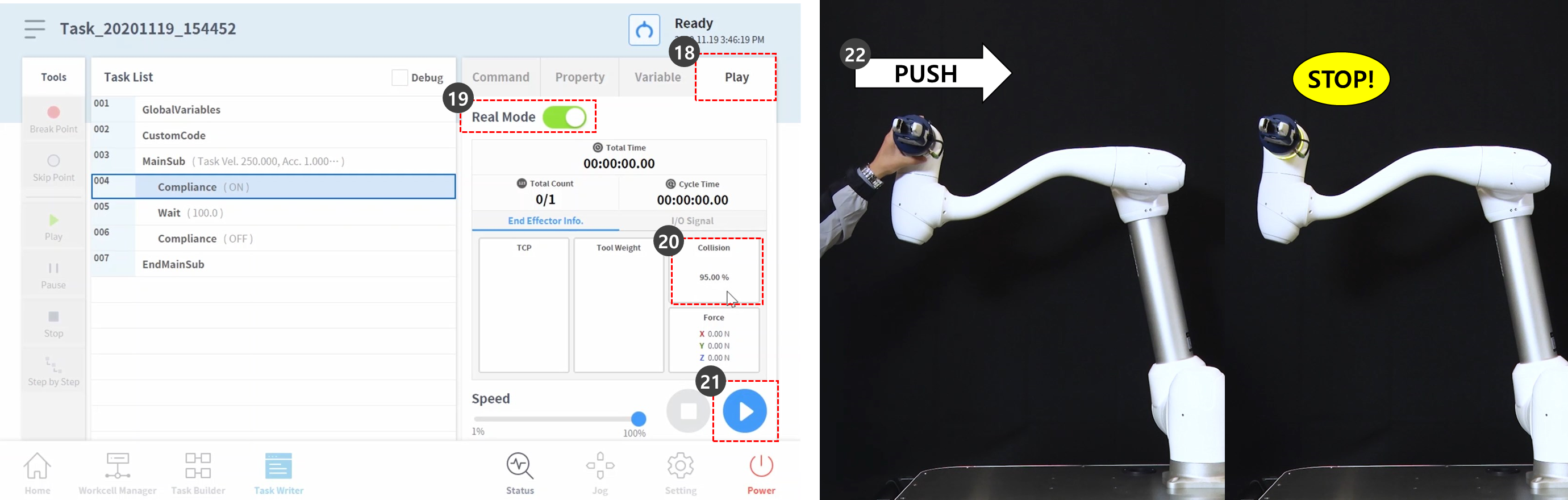
- Selezionare la scheda Riproduci.
- Attivare il pulsante di commutazione modalità reale.
- Una volta attivato il pulsante di attivazione/disattivazione, il pulsante si illumina in verde.
- Questo esempio attiverà deliberatamente il sistema di arresto di sicurezza per spiegare il motivo della riduzione della sensibilità di collisione durante il controllo di conformità. La sensibilità alla collisione di questo campione è del 95%. Nei casi in cui la sensibilità di collisione è così elevata, il robot reagisce alle collisioni in modo molto sensibile.
- In caso di collisione, il robot viene arrestato dall'arresto di sicurezza.
- Premere il pulsante Riproduci.
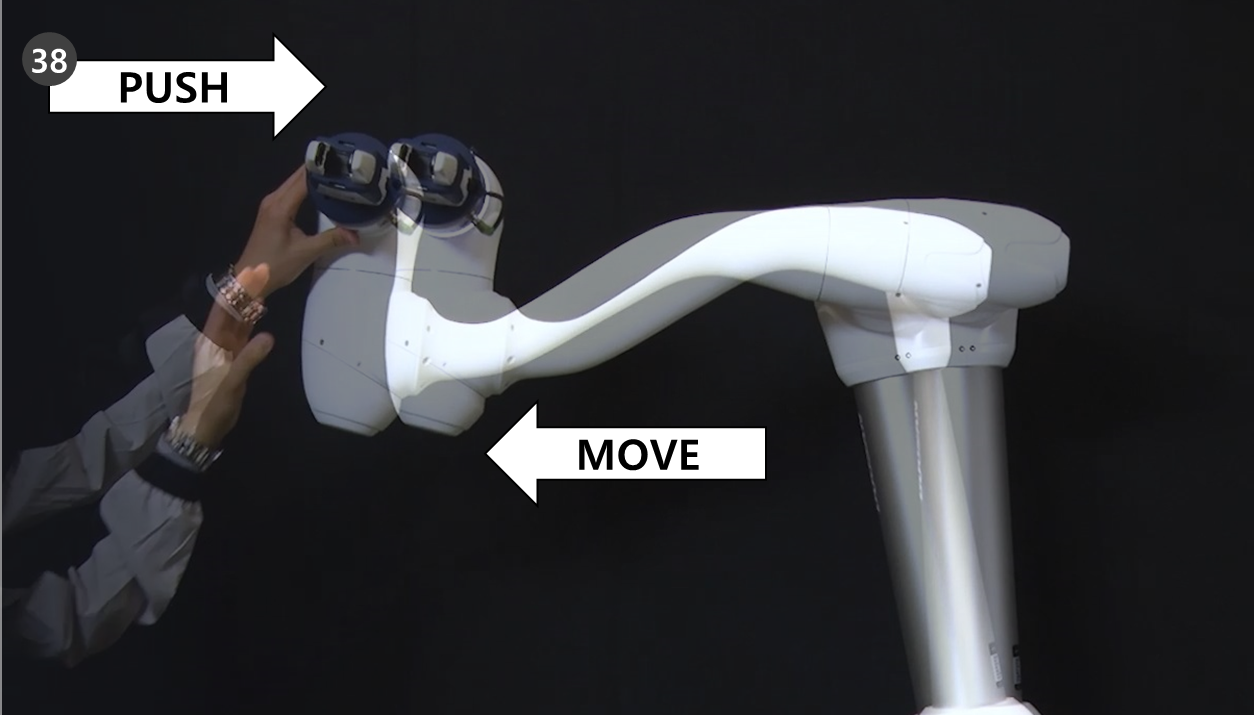
- Tenere l'estremità del robot e spingerla lentamente nella direzione del corpo del robot. Il robot si arresta a causa di un errore di collisione. Durante l'arresto di sicurezza a causa di una collisione, il LED del robot si accende in giallo.
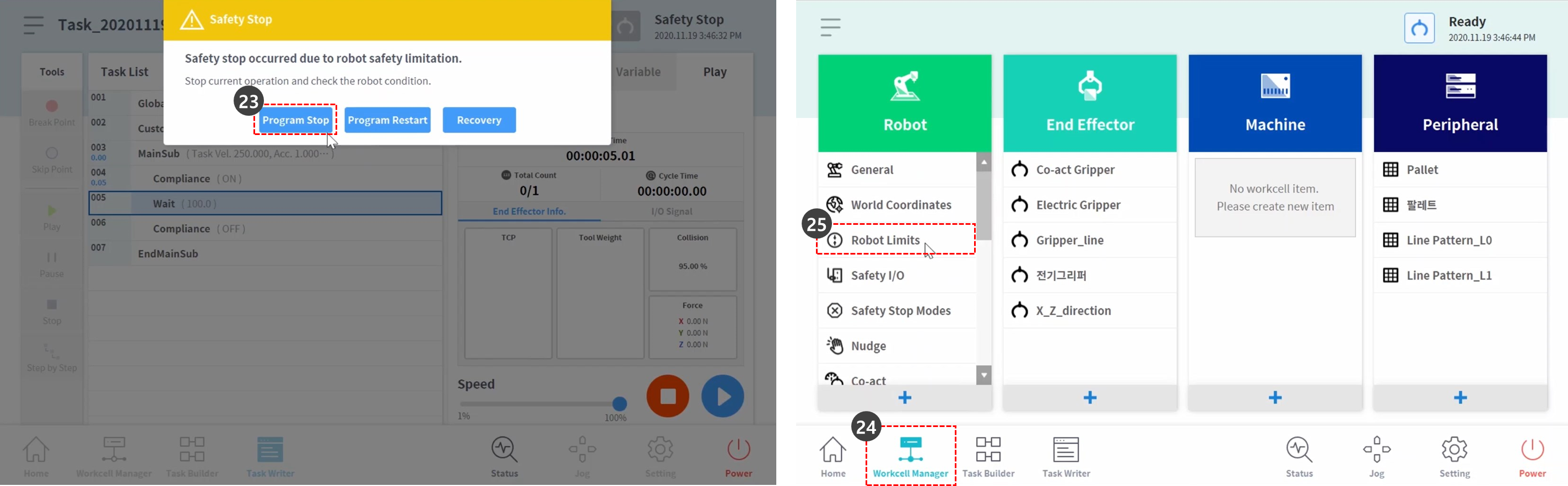
- Premere il pulsante Program Stop (arresto programma) nella finestra gialla di avvertenza relativa all'arresto di sicurezza sullo schermo. Il programma di attività in corso viene arrestato.
- Selezionare Workcell Manager (Gestione celle di lavoro) dal menu in basso.
- Selezionare Robot > Robot Limits (Robot > limiti robot).
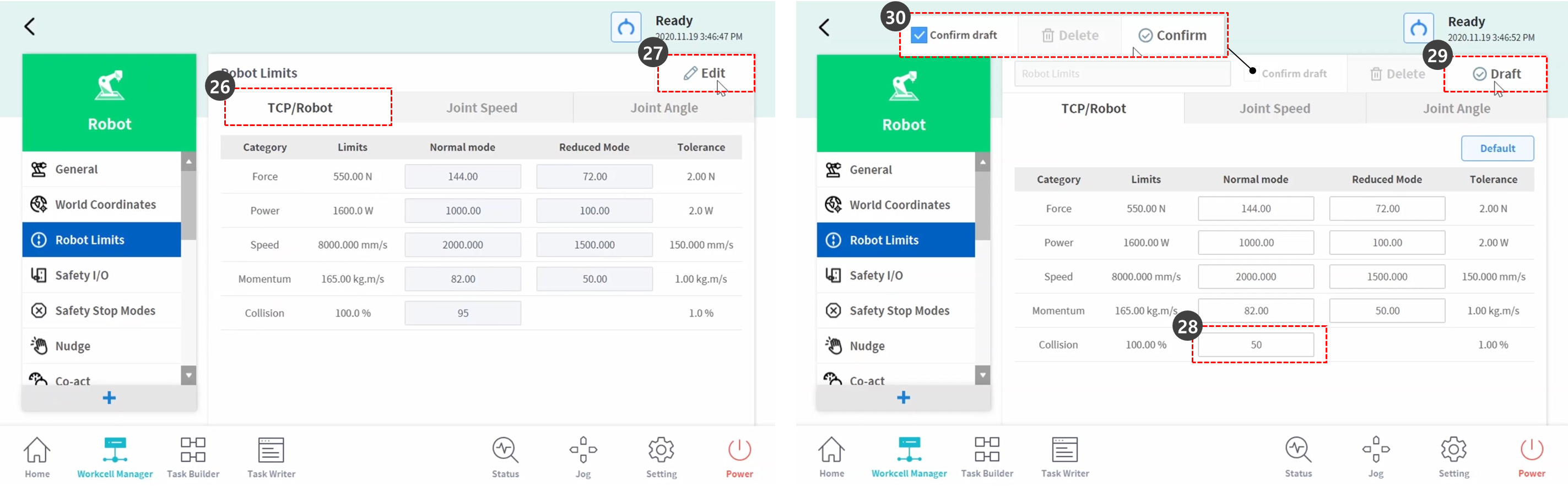
- Selezionare la scheda TCP/Robot (TCP/robot).
- Premere il pulsante Modifica.
- Impostare la sensibilità di collisione come segue:
- Modalità normale: 50 %
- Premere il pulsante Bozza.
- Selezionare la casella di controllo Conferma bozza e premere il pulsante Conferma.
- Selezionare Task Writer dal menu in basso.
- Selezionare il file salvato nella schermata a sinistra.
- Prima di selezionare, verificare che il nome del primo file di attività sia il nome dell'attività nel passaggio 2. L'ultima attività salvata si trova all'inizio dell'elenco dei file di Task Writer.
- Premere il pulsante Apri.
- Selezionare la scheda Riproduci.
- Attivare il pulsante di commutazione modalità reale.
- Premere il pulsante Riproduci.
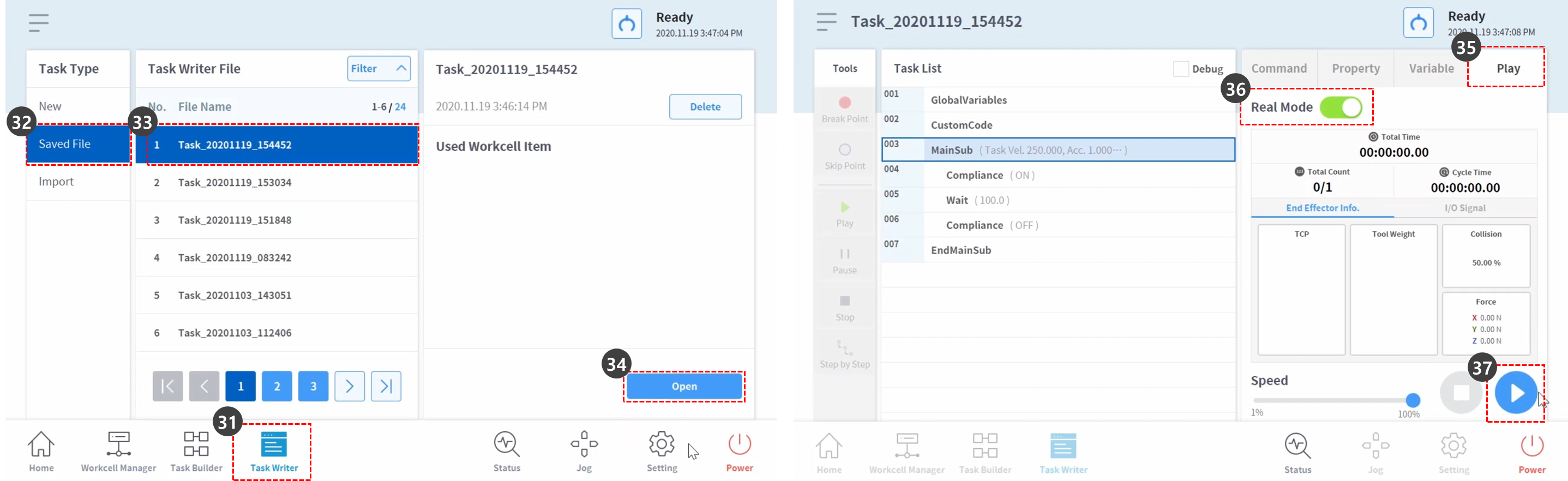
- Tenere l'estremità del robot e spingerla lentamente nella direzione del corpo del robot. Il robot si sposta a causa della forza di spinta e ritorna nella posizione originale.