
Configurazione e descrizione del sistema del robot
Elenco componenti
 |  |
Manipolatore | Centralina (opzionale: Vedere Appendice) |
 |  |
Teach pendant | Cavo di alimentazione del controller |
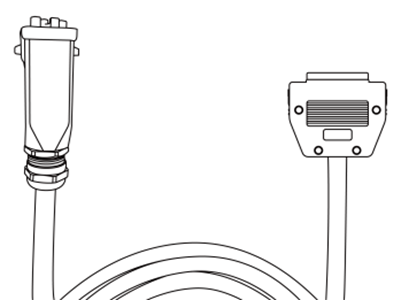 |  |
Cavo di collegamento manipolatore | Manuale dell'utente/guida rapida |
Nome di ciascuna parte e funzioni
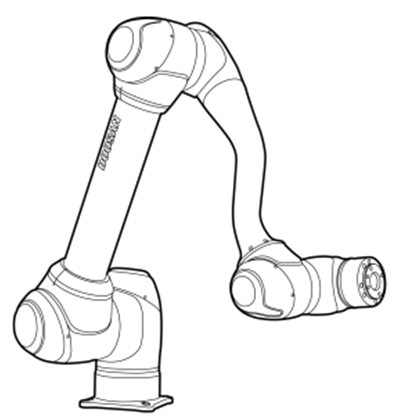
Manipolatore
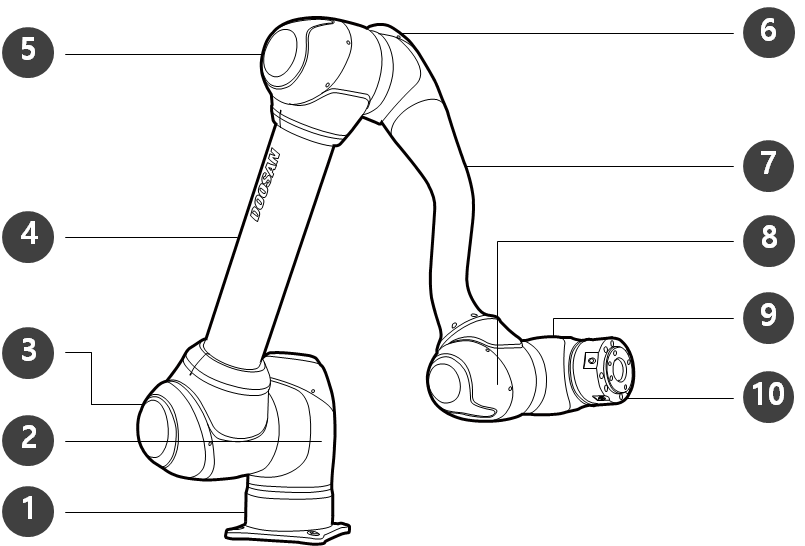
Nome di ogni parte
No. | Nome | No. | Nome |
|---|---|---|---|
1 | Base | 6 | J4 |
2 | J1 | 7 | Collegamento 2 |
3 | J2 | 8 | J5 |
4 | Collegamento 1 | 9 | J6 |
5 | J3 | 10 | Flangia dello strumento |
ㅤ
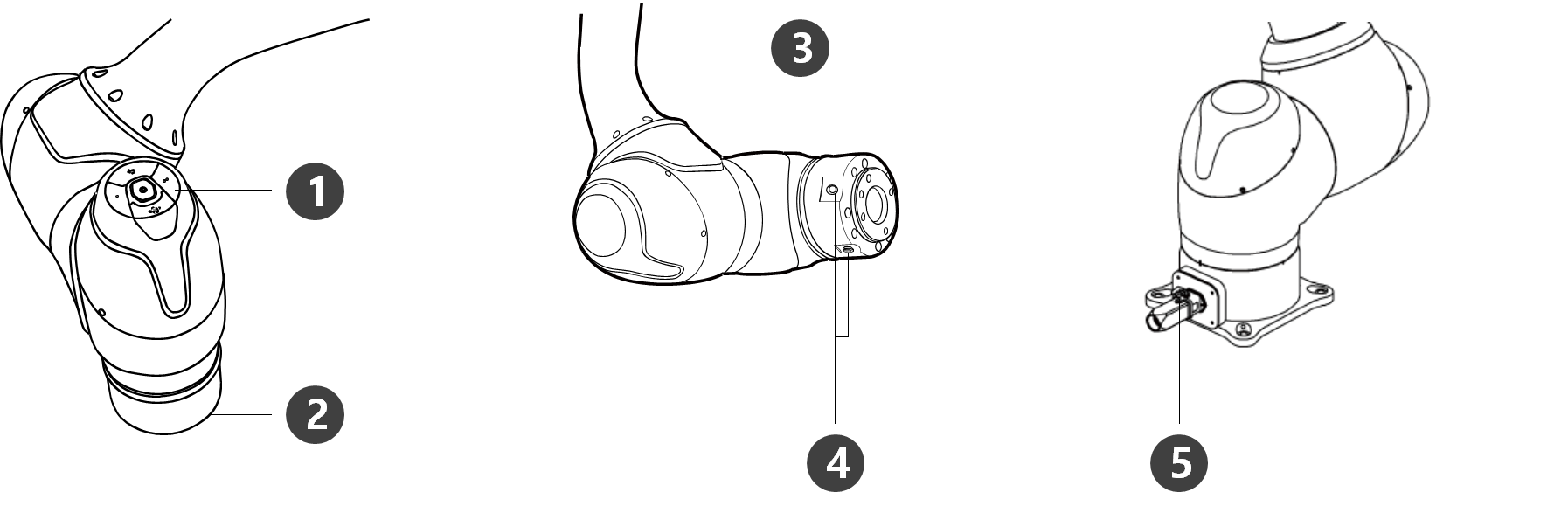
Caratteristiche principali
No. | Elementi | Descrizione |
|---|---|---|
1 | Cabina di pilotaggio | Pulsanti operativi [opzionali] per l'apprendimento diretto e il funzionamento |
2 | Flangia dello strumento | Area in cui installare gli attrezzi. |
3 | 3 | Visualizza lo stato del robot con colori diversi. Per ulteriori informazioni sullo stato del robot, fare riferimento al colore del LED di stato e flangia per ogni modalità. Versione: Serie H. La serie H è dotata di un LED aggiuntivo sull'asse 1 che indica lo stesso stato e colore. |
4 | I/o flangia | Porta i/o per il controllo dell'utensile. |
5 | Connettore | Utilizzato per fornire alimentazione e comunicazione al robot. |
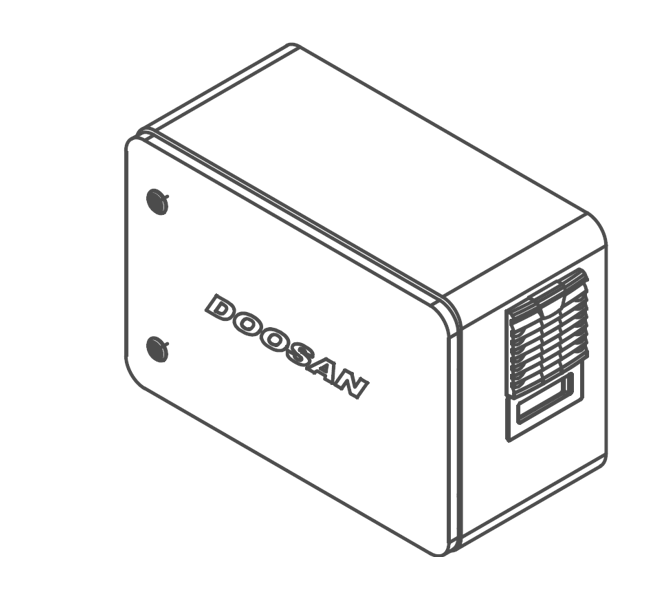
Centralina
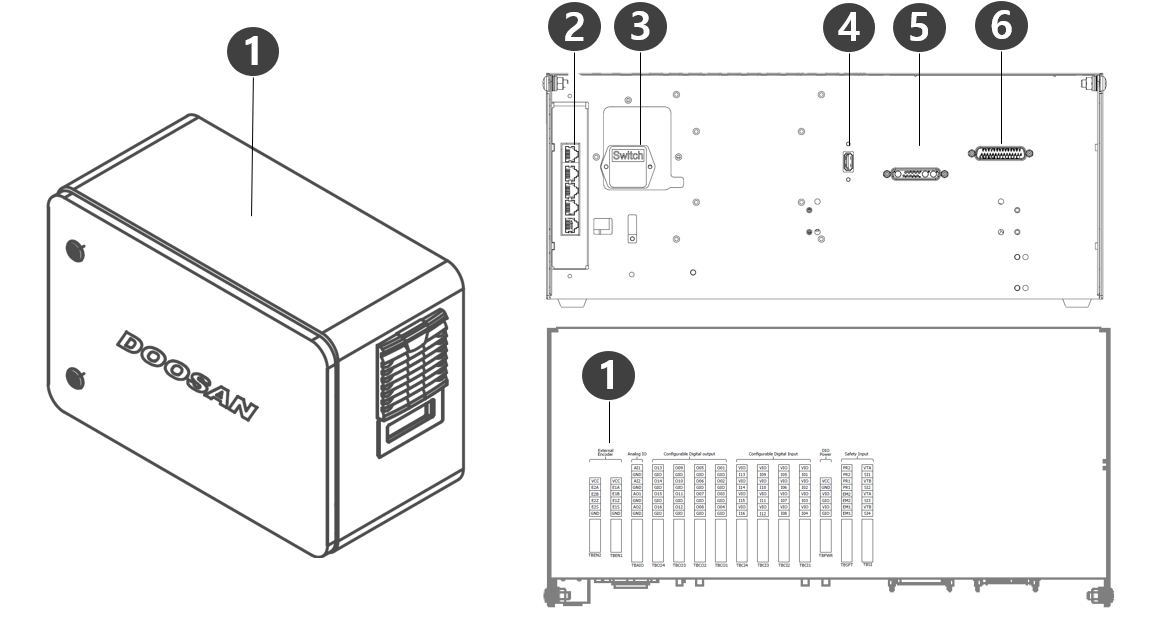
No. | Elementi | Descrizione |
|---|---|---|
1 | Terminale di collegamento i/o (interno) | Può essere collegato a controller o periferiche di altri robot. |
2 | Terminale di connessione di rete | Utilizzato per il collegamento al terminale di connessione di rete all'interno del controller per l'utilizzo di computer portatili, dispositivi TCP/IP e apparecchiature Modbus. |
3 | Interruttore/terminale di collegamento dell'alimentazione | Utilizzato per collegare l'alimentazione di rete del controller per accenderlo o spegnerlo. Per ulteriori informazioni, fare riferimento a accensione/spegnimento del sistema. |
4 | Terminale di collegamento USB | Consente di memorizzare i registri creati mentre il robot è in funzione nella memoria USB o di esportare e importare attività. |
5 | Terminale di collegamento del cavo manipolatore | Utilizzato per collegare il cavo del manipolatore al controller. |
6 | Teach pendant Cable Connection Terminal | Utilizzato per collegare il cavo del teach pendant al controller. |
Nota
Se si sceglie un controller opzionale, consultare il manuale dell'utente nell'appendice per effettuare il collegamento prima dell'uso.
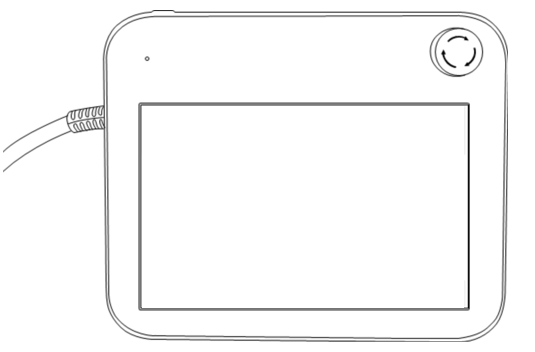
Teach pendant
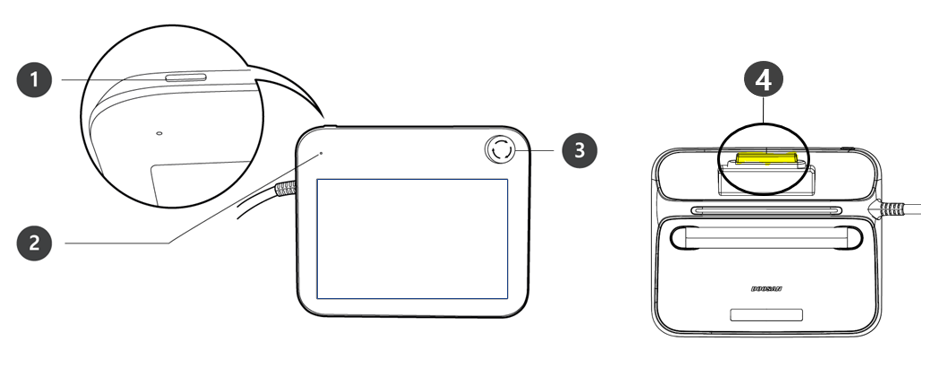
No. | Elementi | Descrizione |
|---|---|---|
1 | Pulsante di accensione |
|
2 | LED di alimentazione |
|
3 | Pulsante di arresto di emergenza |
|
4 | Pulsante guida manuale (interruttore di abilitazione a 3 posizioni 3PE) |
|
Nota
Se il teach pendant deve essere protetto e montato durante il funzionamento, il coperchio morbido fornito da noi lo rende più sicuro e facile da usare.
Nuova funzione TP (TP-02) aggiunta: Doppia funzione guida manuale
Il TP esistente (TP-01) non può essere utilizzato nel controller integrato. (Mappa pin modificata a causa dello switch 3PE)
Il nuovo TP (TP-02) può essere utilizzato nel controller esistente, ma il LED viene modificato in un unico colore (rosso) e visualizzato e non è possibile utilizzare funzioni aggiuntive.
Configurazione del sistema
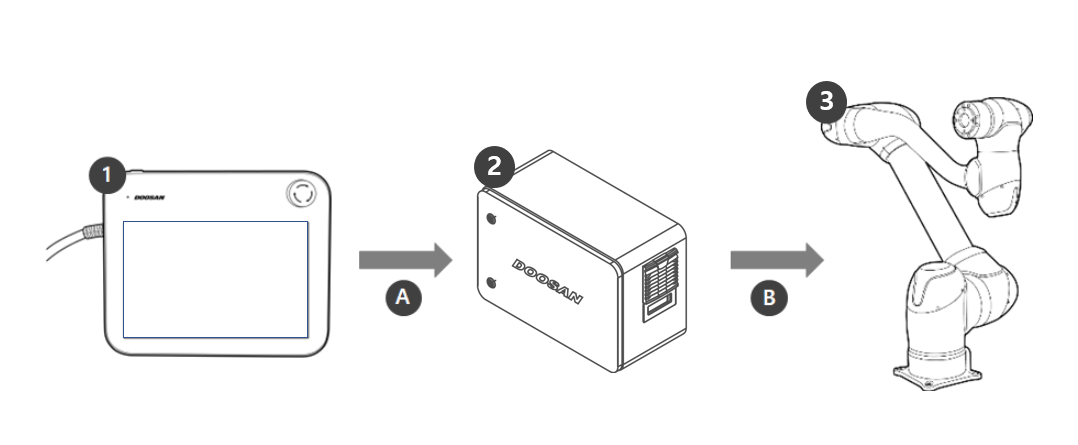
No. | Nome | Descrizione |
|---|---|---|
1 | Teach pendant | Questo dispositivo gestisce l'intero sistema ed è in grado di insegnare le posizioni specifiche del robot o di configurare le impostazioni relative ai manipolatori e ai controller. |
2 | Centralina | Controlla il movimento del robot in base alla posa o al movimento impostato dal teach pendant. È dotato di varie porte i/o che consentono il collegamento e l'uso di varie apparecchiature e dispositivi. |
3 | Manipolatore | Si tratta di un robot collaborativo industriale in grado di eseguire attività di trasporto o assemblaggio con vari strumenti. |
A. | Comando/monitoraggio | |
B | Alimentazione/rete |