Il coperchio della flangia terminale del robot è provvisto di un connettore a 8 pin M8 spec, fare riferimento alla figura seguente per l'ubicazione e la forma.
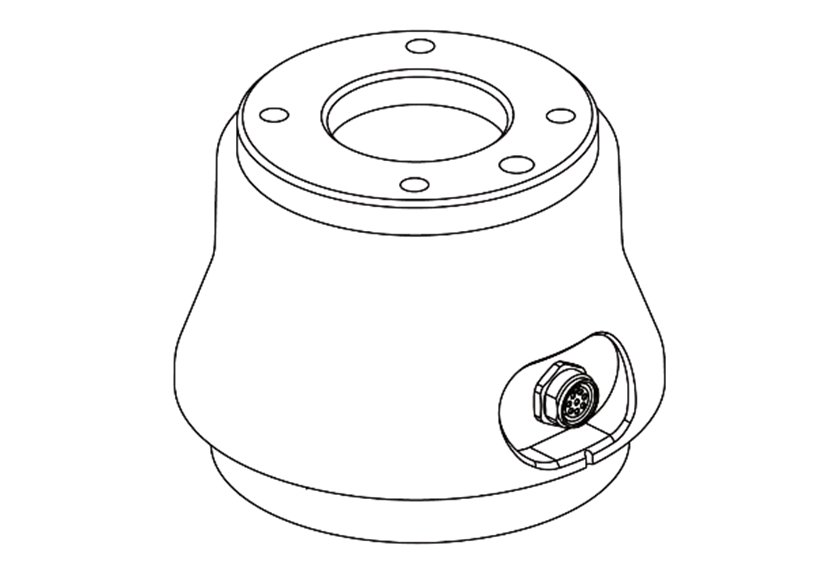
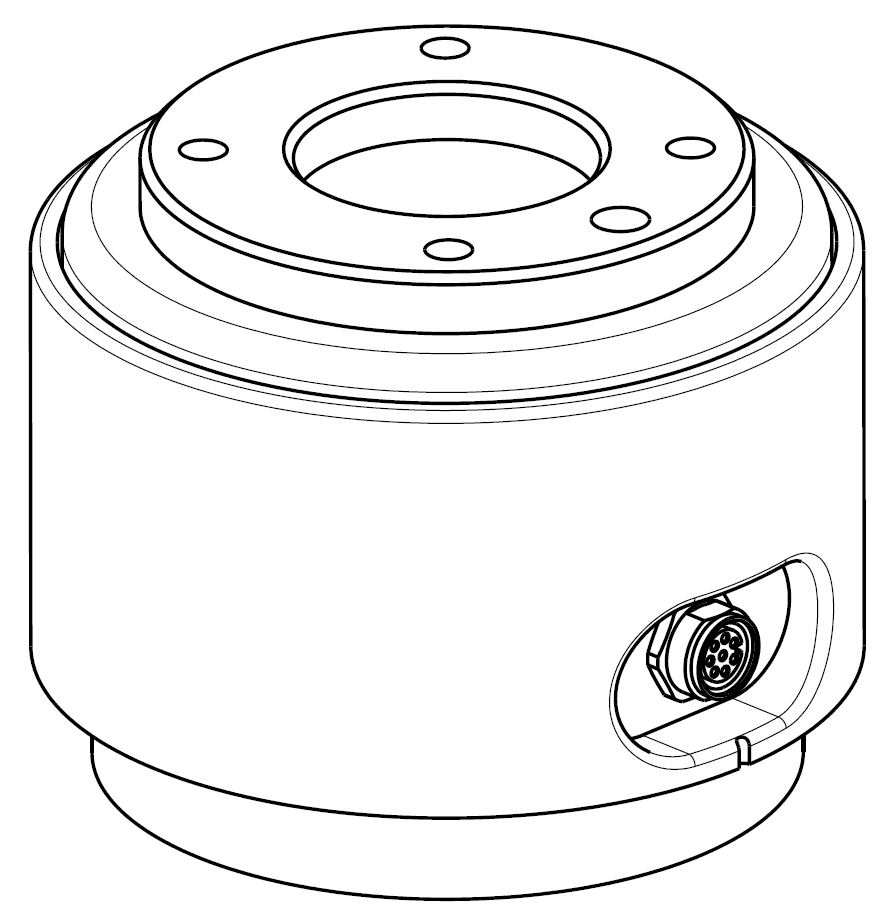
I prodotti fabbricati a partire da agosto 2022 hanno cambiato forma e orientamento del connettore, come mostrato nella figura seguente.
Il connettore fornisce l'alimentazione elettrica e i segnali di comando necessari all'azionamento della pinza o dei sensori integrati in particolari utensili del robot. Questi sono esempi di cavi industriali (è consentito l'impiego di cavi equivalenti):
-
Phoenix contact 1404178 (Diritto)
-
Phoenix contact 1404182 (Ad angolo retto)
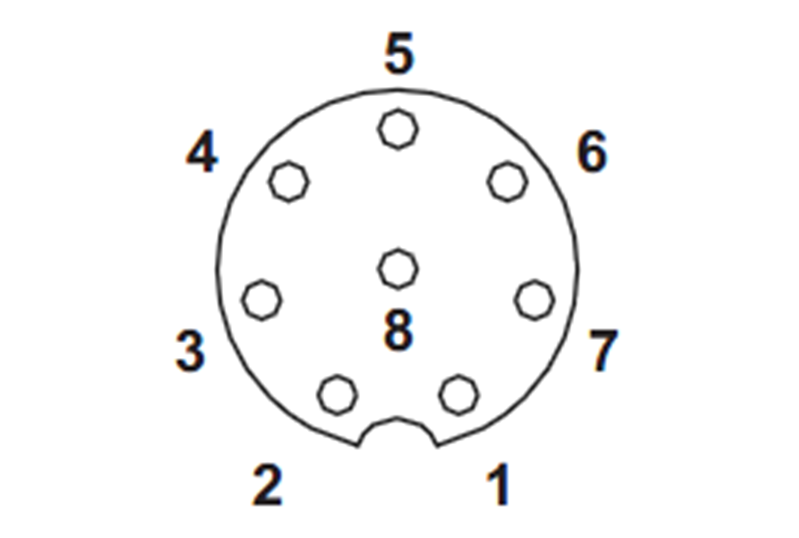
La piedinatura di ciascun connettore è la seguente:
Schema
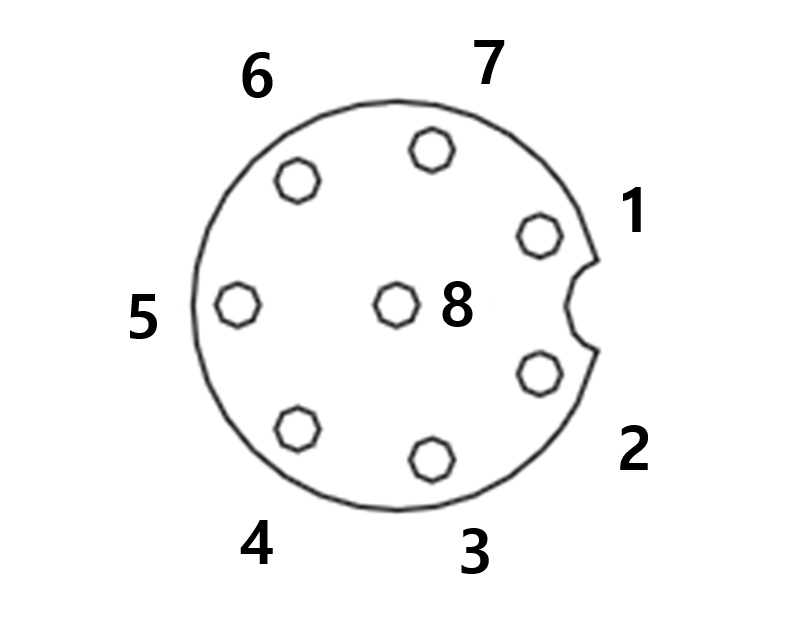
prodotti fabbricati da agosto 2022, l'orientamento del connettore è stato modificato come mostrato nella figura seguente.
Le funzioni I/O fornite tramite il connettore X1 si differenziano l'una dall'altra; fare riferimento alla tabella seguente per le impostazioni I/O di dettaglio.
Impostazione X1 (I/O digitale, RS 485)
|
No |
Segnale |
Nota |
|
1 |
RS485 A |
Mfg date
2020.07.06 ~ 2021.01.21 |
|
2 |
RS485 B |
|
|
3 |
Digital Output 1 |
|
|
4 |
Digital Output 2 |
|
|
5 |
+24V |
|
|
6 |
Digital Input 2 |
|
|
7 |
Digital Input 1 |
|
|
8 |
GND |
Impostazione X1 (I/O digitale, RS 485)
L’impostazione è modificata come segue dal 21 gennaio 2021.
|
No |
Segnale |
Nota |
|
1 |
Digital Input 1 |
Mfg date Prima del 6 luglio 2020
Mfg date Dopo il 21 gennaio 2021
Applicati altri numeri di serie VMA6F5-A0509S WAA6H7-A0912 WAA6H8-A0912 |
|
2 |
Digital Output 1 |
|
|
3 |
Digital Output 2 |
|
|
4 |
RS485 A |
|
|
5 |
+24V |
|
|
6 |
RS485 B |
|
|
7 |
Digital Input 2 |
|
|
8 |
GND |
-
Configurare utensili e pinze dopo aver verificato la configurazione I/O in base alla data di produzione (data si fabbricazione su targhetta robot).
-
Reperibile su Doosan Robotlab. (https://robotlab.doosanrobotics.com)
-
L’attivazione degli utensili del robot senza tener conto della configurazione I/O può causare il danneggiamento permanente del prodotto.
L'alimentazione interna della I/O flangia è impostata su 24 V; fare riferimento alla tabella seguente per le specifiche dettagliate dell'alimentazione durante il collegamento I/O.
|
Parametro |
Min |
Tipo |
Max |
Unità |
|
Tensione di alimentazione |
- |
24 |
- |
V |
|
Corrente di alimentazione |
- |
2 |
3 |
A |
|
Uscita digitale |
- |
2 |
- |
EA |
|
Ingresso digitale |
- |
2 |
- |
EA |
L'impostazione è stata caricata come segue dall'11 aprile 2024
Impostazione X1
|
No |
Segnale |
|
1 |
Digital Input 1 |
|
2 |
Digital Output 1 |
|
3 |
Digital Output 2 |
|
4 |
Analog Input 1 / RS-485 + |
|
5 |
+24V / +12V / 0V (off) |
|
6 |
Analog Input 2 / RS-485 - |
|
7 |
Digital Input 2 |
|
8 |
GND |
Descrizione delle funzioni I/O
|
Tipo |
Descrizione |
|---|---|
|
Power |
Imposta l'alimentazione interna su 0 V (predefinito), 12 V o 24 V |
|
Digital Output |
imposta su PNP (tipo sorgente, predefinito) o NPN (tipo sink) |
|
Digital Input |
PNP (tipo sorgente, predefinito) |
|
Analog Input |
imposta su tensione (0-10 V) o corrente (4-20 mA, predefinito) |
|
RS-485 |
Velocità di trasmissione massima di 1 M |
Imposta l'alimentazione interna su 0 V, 12 V o 24 V.
Le specifiche elettriche sono riportate di seguito:
|
Parametro |
Min |
Tipo |
Max |
Unità |
|---|---|---|---|---|
|
Supply voltage (12V mode) |
11.4 |
12 |
12.6 |
V |
|
Supply voltage (24V mode) |
22.8 |
24 |
25.2 |
V |
|
Supply current |
- |
- |
3 |
A |
-
Configurare l'utensile e la pinza in modo che non rappresentino un pericolo in caso di interruzione dell'alimentazione.
(es., caduta del workpiece dall'utensile)
-
Il terminale N. 5 di ciascun connettore ha sempre un'uscita a 24 V quando il robot è alimentato, quindi assicurarsi di aver interrotto l'alimentazione al robot quando si procede alla configurazione dell'utensile e della pinza.