Obbligatorio FACILE 3 min
Il robot si trova nella sua posizione di imballaggio per consentire un facile trasporto o imballaggio. Per utilizzare il robot, è necessario disinnestare la posa della confezione. Poiché il robot mantiene una posa che supera il limite dell'angolo del giunto durante la posa della confezione, è impossibile impostare lo stato Servo ON a causa della violazione del limite di sicurezza. In questo stato il LED del robot si illumina in rosso.
Se è necessario imballare il robot a causa del trasferimento, impostare la posa della confezione utilizzando Sposta con posa della confezione nella modalità di imballaggio.
Il processo di rilascio della posa di imballaggio è il seguente:
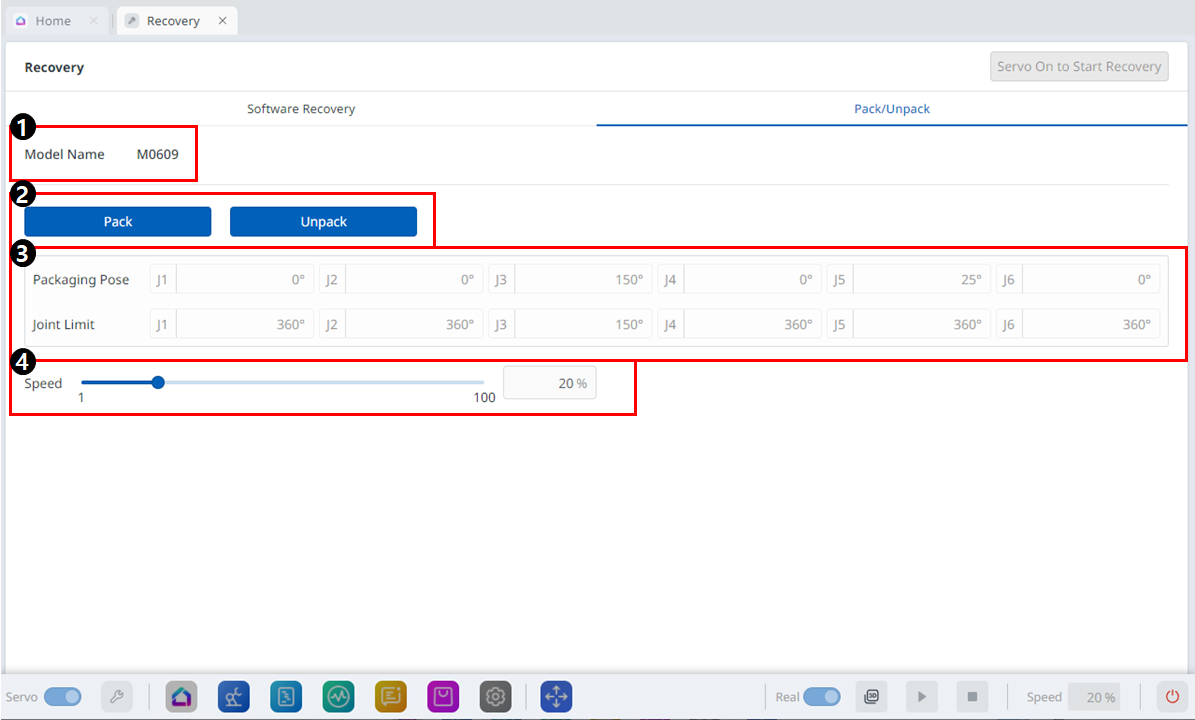
Voci di menu
|
|
Elemento |
Descrizione |
|---|---|---|
|
1 |
Nome modello |
Viene visualizzato il nome del modello di robot collegato. |
|
2 |
Confezione/Disimballaggio |
È possibile selezionare Pack o Disimballare. |
|
3 |
Posa imballo/limite giunto |
Vengono visualizzati i valori limite di posa e articolazione. |
|
4 |
Rapporto di velocità |
La velocità della modalità di impacco o disimballaggio può essere regolata tramite un cursore o un ingresso. |
Per configurare la modalità di imballaggio, attenersi alla seguente procedura:
-
Toccare il menu Ripristino nel riquadro dell'intestazione.

-
Selezionare la scheda modalità di imballaggio.

-
Toccare il pulsante Servo On to Start Recovery (Avvia ripristino) per attivare la modalità di confezionamento.

-
Il robot si sposta automaticamente sulla posa di confezionamento impostata.Il pulsante Pack consente di posizionare il robot nella posizione Pack e il pulsante Unpack consente di posizionare il robot nella posizione Home predefinita.