
Munkaállomás-elem – robot telepítési póz hozzáadása (rögzítés)
OPCIONÁLIS EGYSZERŰ 3 PERC
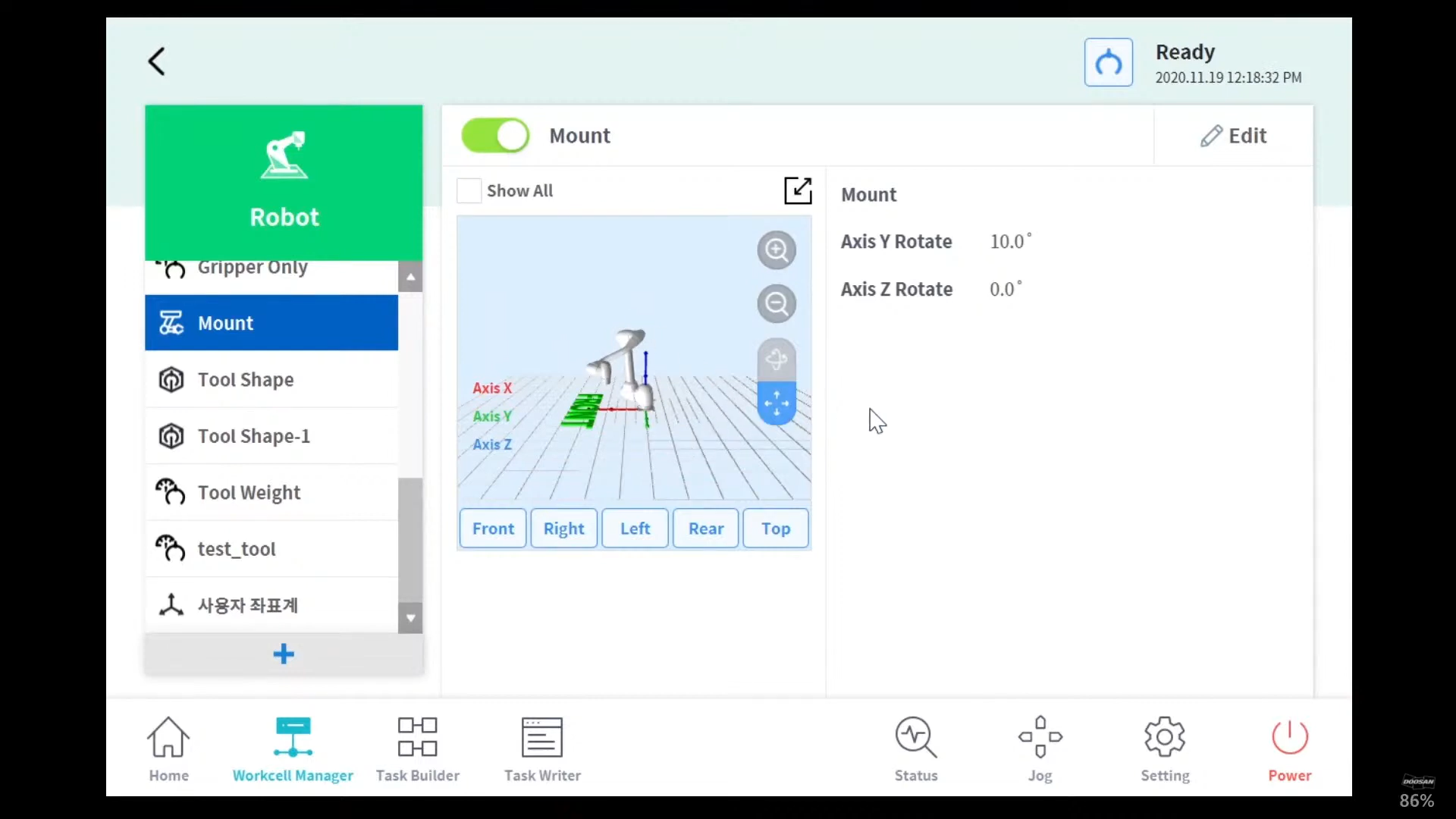
A robot telepítési pózát egy robot telepítési póz (mount) munkacella elem hozzáadásával lehet beállítani. Ha a robot sík felületre van szerelve, ez a lépés kihagyható.
Robot telepítés pose lehet beállítani a Workcell Manager > Robot > 
- A beépítési szög az automatikus mérés funkcióval mérhető. Ha azonban a szög kisebb, mint 5 fok, az automatikus mérés nem érhető el.
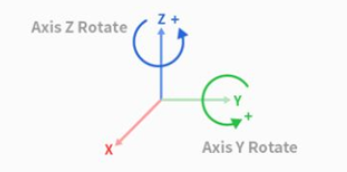
- Ha a robot a mennyezetre vagy a falra van szerelve, a robot beépítési szöge az Y-tengely és a Z-tengely forgásával állítható be.
- Mivel az automatikus szerszámsúly-számítás a gravitáció alapján történik, ajánlott a szerszámsúly visszaállítása a rögzítés beállítása után.
A munkaállomás elem regisztrálása (megerősítése) után a munkacella elem használatához a váltókapcsolót engedélyezni kell.
Vigyázat
- A robottelepítés póz (mount) munkacella-elem beállításakor javasolt a világkoordináták módosítása is. Ha a világkoordináták nem változnak meg, a robot a teach függőlámpa robotszimulátor képernyőjén jelenik meg, mivel a robot a sík felületre van telepítve (alap).