A robot mozgatásához robot szerszám alapján kövesse az alábbi lépéseket:
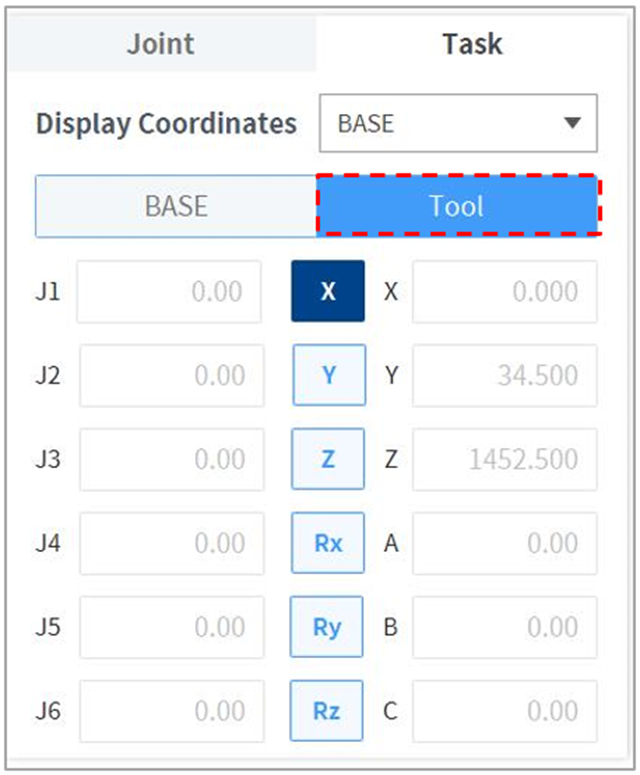
Válassza ki a Feladat fület a Léptetés képernyőn.
Válassza ki az Alap vagy Világ beállítást megjelenő koordinátákként, és állítsa be a Szerszám beállítást a feladatkoordináták referenciapontja alapján.
Válassza ki a szerszám koordinátákat a mozgatáshoz.
Nyomja meg és tartsa lenyomva az Irány gombot(,)a megfelelő tengely mozgatásához.
Megjegyzés
A biztonsági terület nem érvényes virtuális üzemmódban.
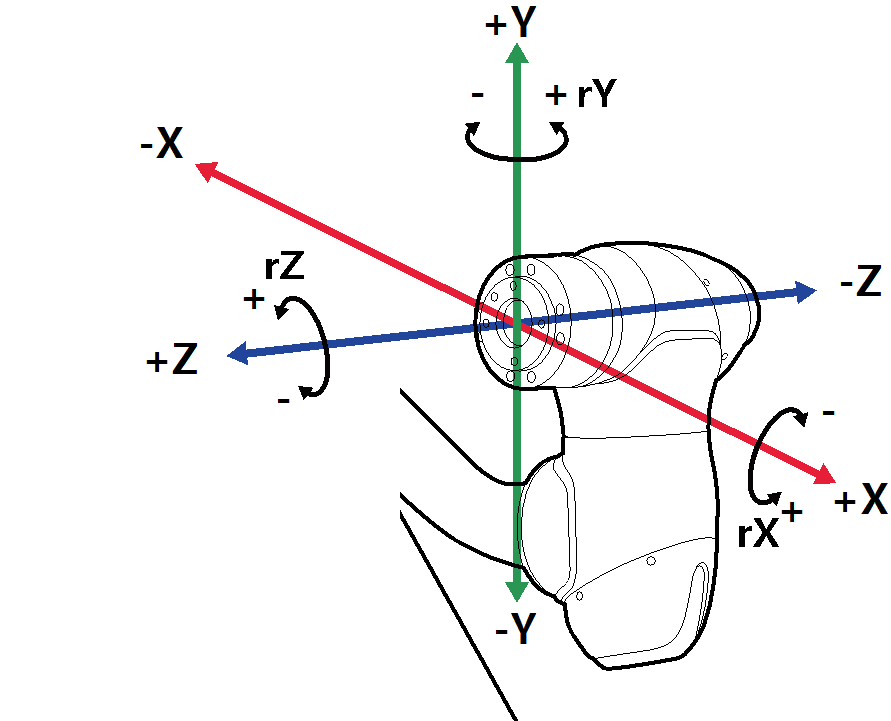
Az Rx, Ry és Rz a TCP (szerszám középpontja) szerint van végrehajtva.
JavaScript errors detected
Please note, these errors can depend on your browser setup.
If this problem persists, please contact our support.