Próbálja ki a compliance parancsmintákat
OPCIONÁLIS NORMÁL 20 PERC

Ezt a mintát a Feladatíróba hozza létre. Ez a minta szinte ugyanúgy kipróbálható a Feladatszerkesztőn.
Vigyázat
- Mielőtt megpróbálná a mintát, mindenképpen olvassa el és kövesse a következőt Használatra vonatkozó óvintézkedések: . További információkért lásd 1. RÉSZ. Biztonsági kézikönyv: .
Megjegyzés
- Ha 15 Nm vagy nagyobb külső nyomaték van a compliance vezérlés be- vagy kikapcsolásakor, a robot a JTS (Joint torque Sensor) hiba miatt leállítja a programot.
- A merevségi változás a külső nyomatékmérettől függetlenül végrehajtható.
- A megfelelőség ellenőrzése során nem hajthatók végre közös mozgások, mint például a MoveJ parancs.
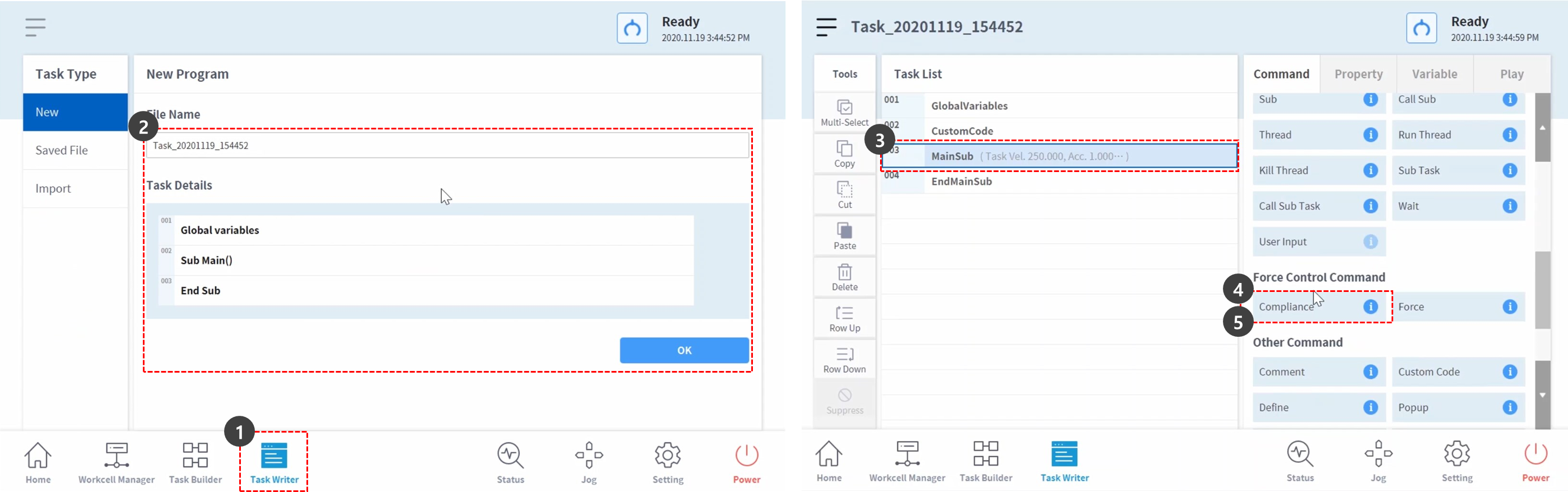
- Válassza ki a Feladatírót az alsó menüből.
- Adja meg a feladat nevét, majd nyomja meg az OK gombot.
- Válassza ki a MainSub parancsot a feladatlista harmadik sorában . Egy új parancs kerül a kiválasztott sor következő sorára.
- Compliance parancs hozzáadása. Ez a parancs a tervek szerint a compliance Control engedélyezéséhez használható.
- Adjon hozzá egy másik megfelelőségi ellenőrzést. Ez a parancs a compliance Control letiltására szolgál.
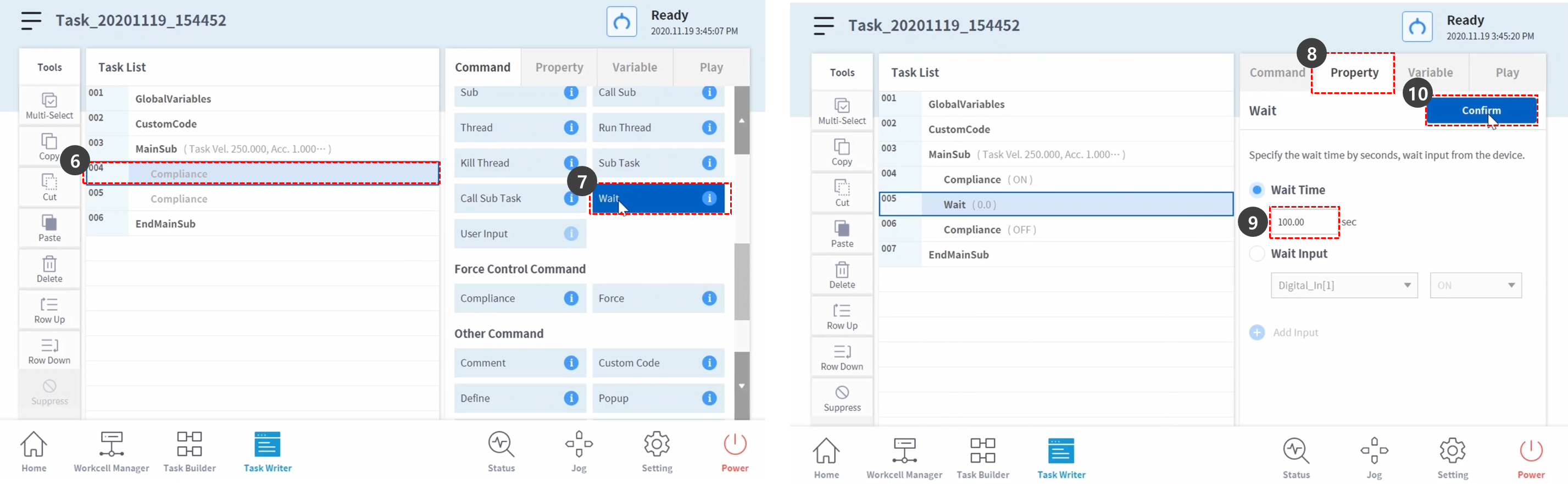
- Válassza ki a negyedik sorban a compliance parancsot. Egy új parancs kerül a kiválasztott sor következő sorára.
- Add WAIT parancs.
- Válassza ki a tulajdonság lapot.
- Állítsa be a várakozási időt a következők szerint:
- Várakozási idő: 100 mp
- Nyomja meg a jóváhagyás gombot.
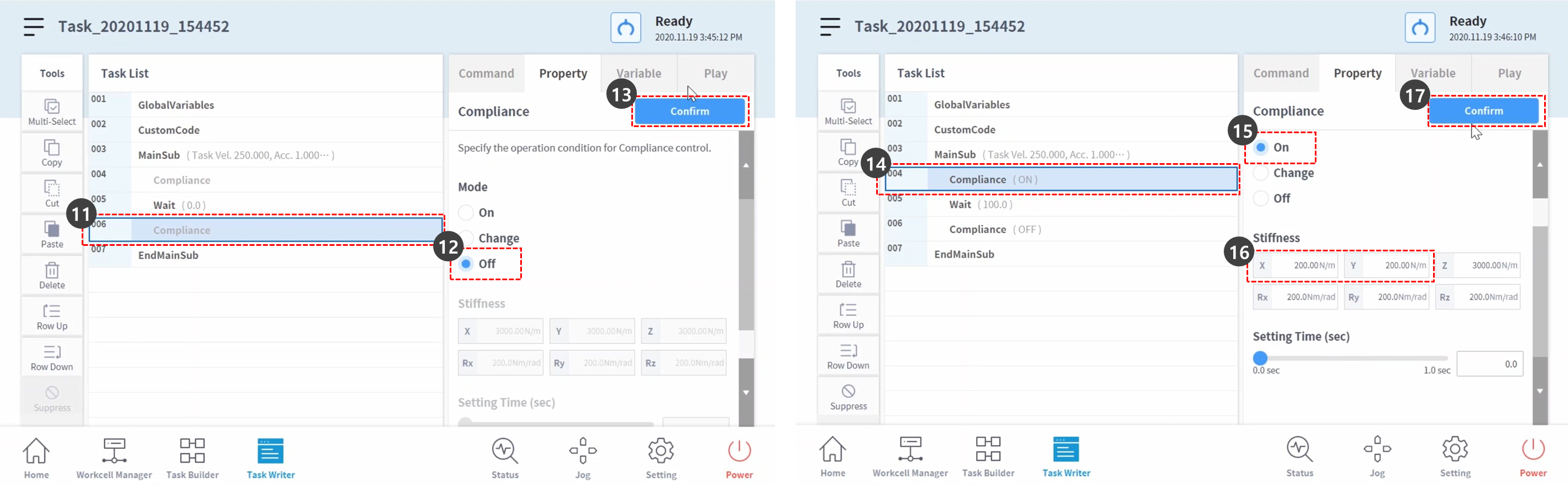
- Válassza ki a compliance parancsot a hatodik sorban.
- Állítsa be a tulajdonság módját a következők szerint: A kikapcsolt üzemmód letiltja a megfelelőség ellenőrzését.
- Üzemmód: Ki
- Nyomja meg a jóváhagyás gombot.
- Válassza ki a negyedik sorban a compliance parancsot.
- Állítsa be a Mode (üzemmód) opciót a tulajdonságban a következők szerint: A bekapcsolt üzemmód lehetővé teszi a megfelelőség ellenőrzését.
- Üzemmód: Be
- A merevséget a következőképpen állíthatja be: Csökkentse az X és Y irányú merevséget a lágyabb reakciók érdekében X és Y irányban.
- X: 200 N/m.
- Y: 200 N/m.
- Z: 3000 N/m (alapértelmezett)
- RX, Ry, RZ: 200 Nm/rad (alapértelmezett)
- Nyomja meg a jóváhagyás gombot.
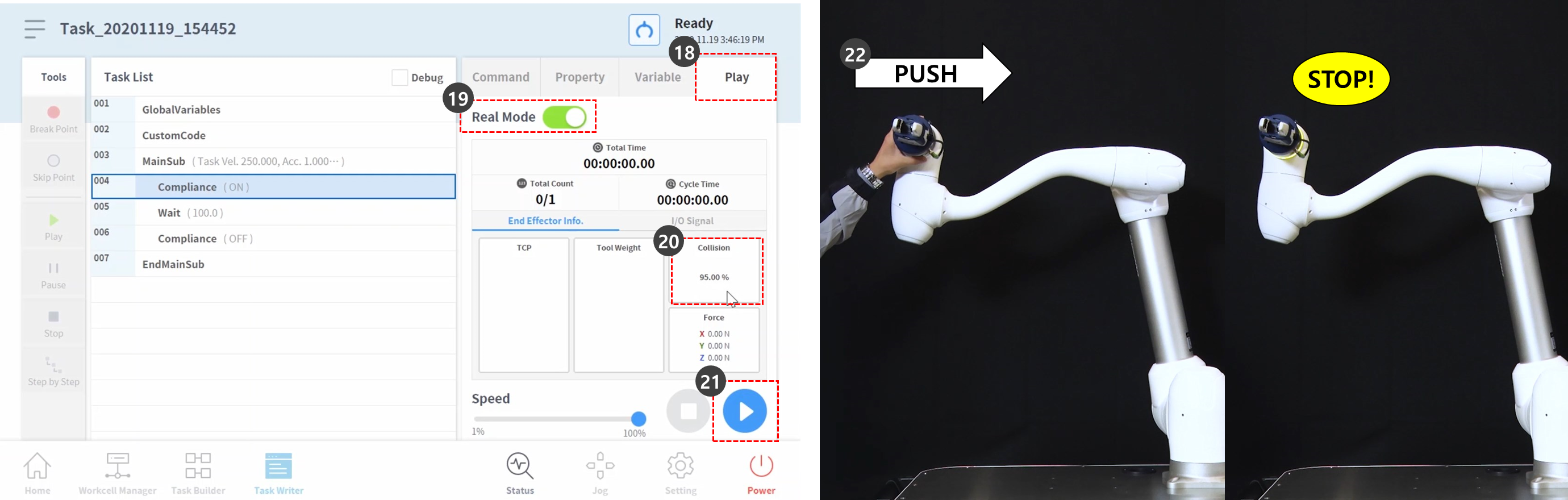
- Válassza a Lejátszás fület.
- Engedélyezze a Real Mode (valós mód) váltógombot.
- A váltógomb bekapcsolása után a gomb zölden világít.
- Ez a minta szándékosan aktiválja a biztonsági leállítást, hogy elmagyarázza az ütközés érzékenységének csökkentésére vonatkozó okot a megfelelőség ellenőrzése során. A minta ütközési érzékenysége 95%. Ilyen nagy ütközési érzékenység esetén a robot nagyon érzékenyen reagál az ütközésekre.
- Ütközés esetén a robotot a biztonsági leállítás leállítja.
- Nyomja meg a lejátszás gombot.
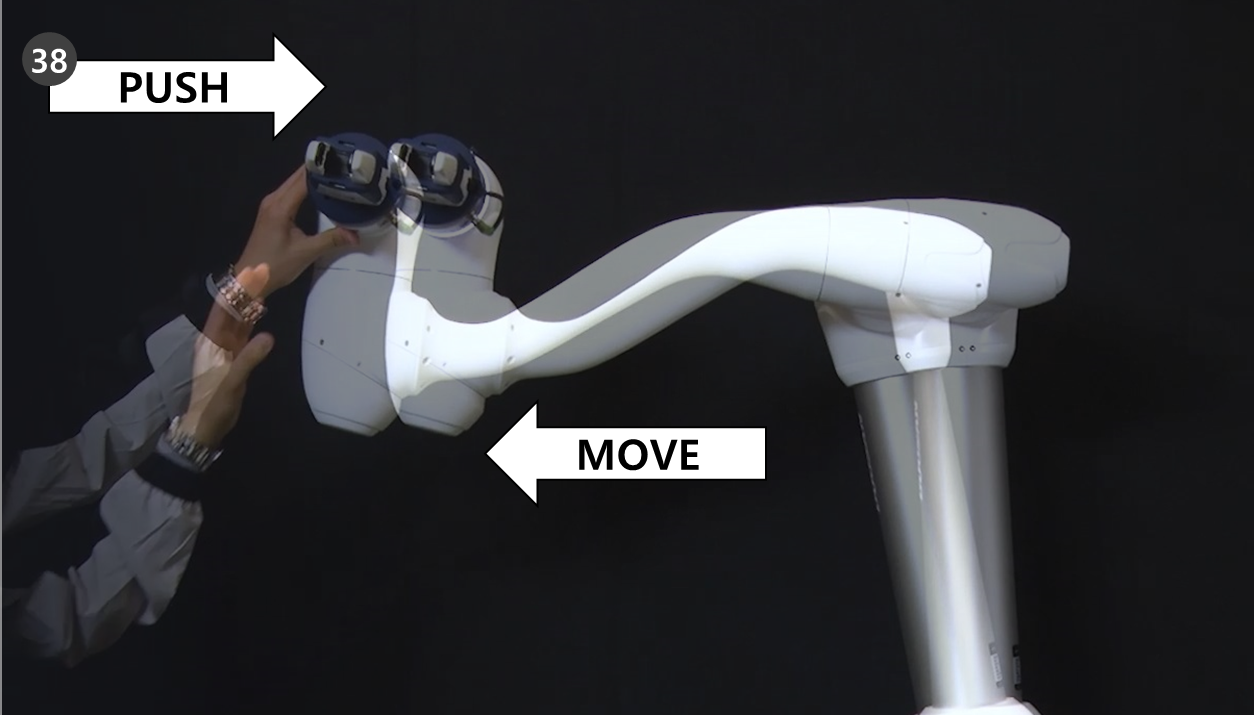
- Tartsa meg a robot végét, és lassan nyomja a robot testirányába. A robot ütközési hiba miatt leáll. Az ütközés miatti biztonsági leállás során a robot LED-je sárgán világít.
- Nyomja meg a program Stop gombot a sárga biztonsági STOP figyelmeztető ablakban a képernyőn. A folyamatban lévő feladat program leáll.
- Válassza ki a Workcell Manager (munkaállomás-kezelő) elemet az alsó menüből.
- Válassza a Robot > Robot Limits (Robot >
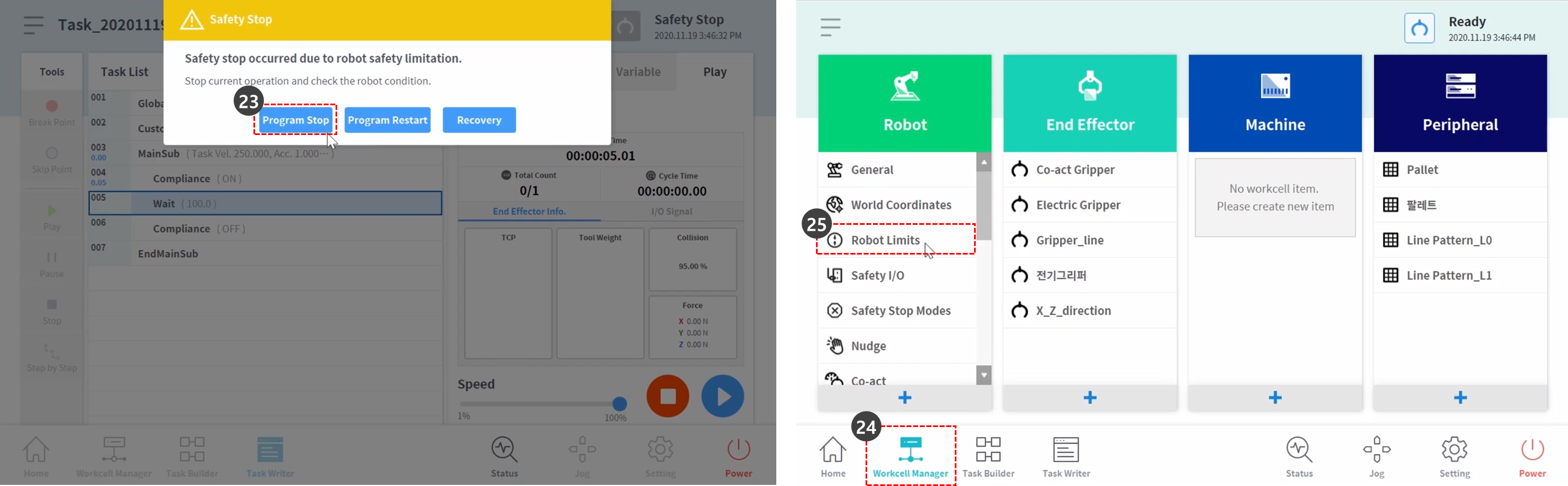
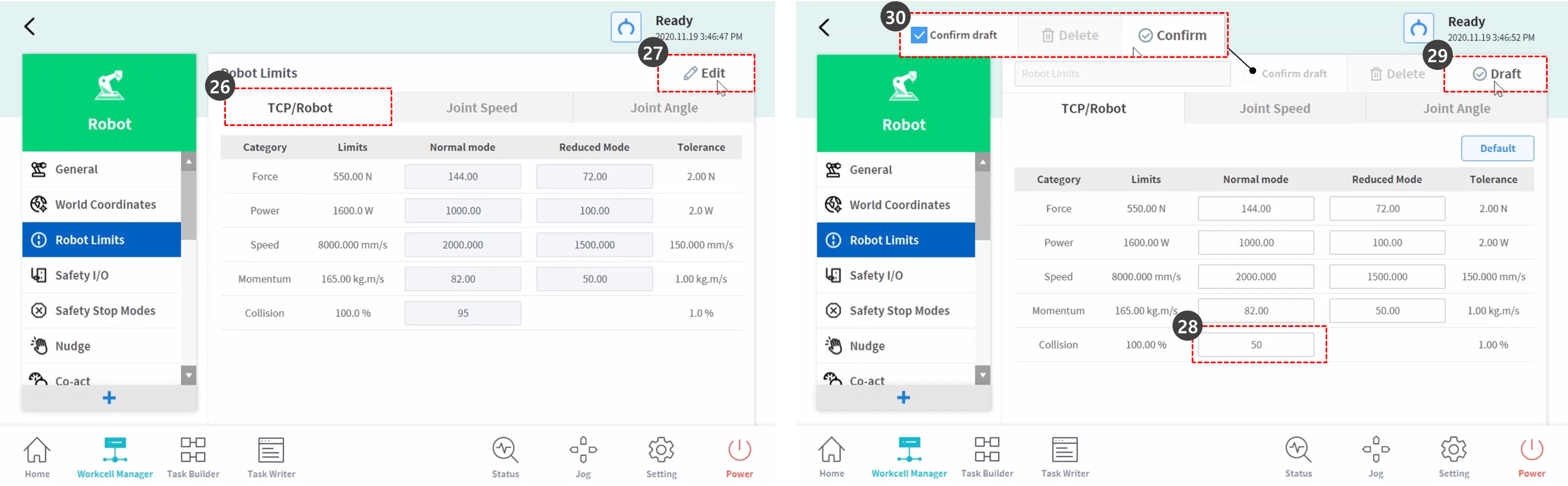
- Válassza a TCP/Robot fület.
- Nyomja meg a Szerkesztés gombot.
- Állítsa be az ütközésérzékenységet a következőként:
- Normál üzemmód: 50 %
- Nyomja meg a Draft (vázlat) gombot.
- Jelölje be a piszkozat megerősítése jelölőnégyzetet, majd nyomja meg a jóváhagyás gombot.
- Válassza ki a Feladatírót az alsó menüből.
- Válassza ki a mentett fájlt a képernyő bal oldalán.
- A kiválasztása előtt ellenőrizze, hogy az első feladatfájl neve a 2. Lépésben szereplő feladatnév-e. Az utoljára mentett feladat a Feladatíró fájllista tetején található.
- Nyomja meg a Megnyitás gombot.
- Válassza a Lejátszás fület.
- Engedélyezze a Real Mode (valós mód) váltógombot.
- Nyomja meg a lejátszás gombot.
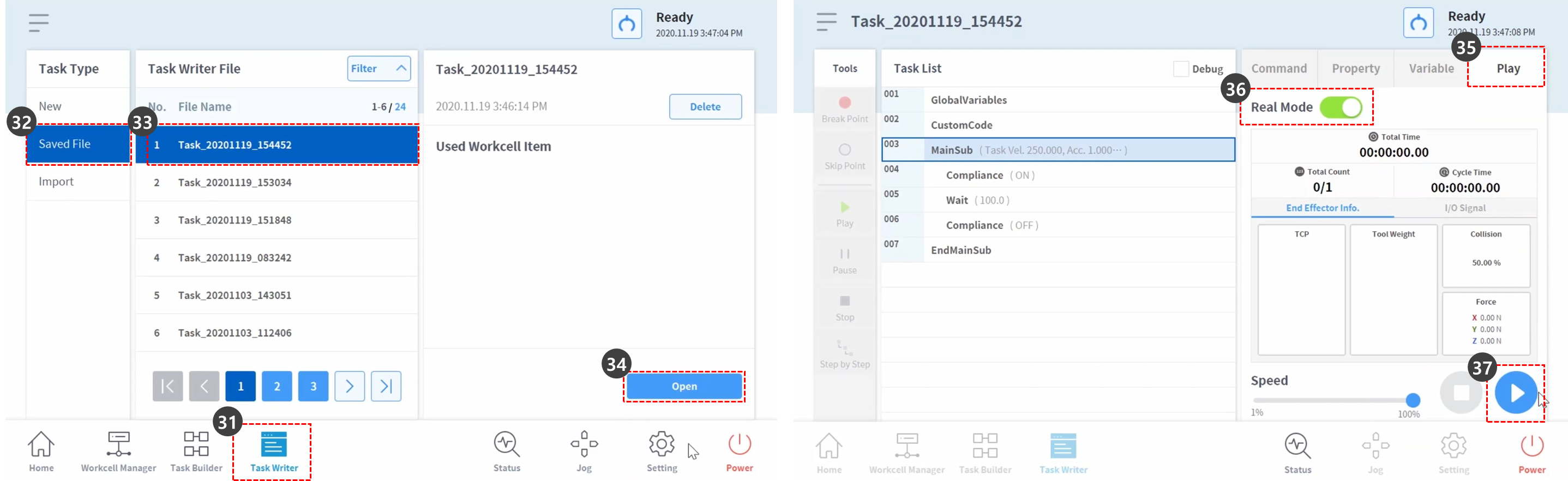
- Tartsa meg a robot végét, és lassan nyomja a robot testirányába. A robot a nyomóerő hatására elmozdul, és visszatér eredeti helyzetébe.