Réglage des modes d'arrêt de sécurité
OBLIGATOIRE FACILE 5 MIN
Apprendre les types de butées de sécurité et comment engager/désengager la butée de sécurité.
Types de butées de sécurité
Les modes d'arrêt fournis pour assurer la sécurité de l'utilisateur sont les suivants :
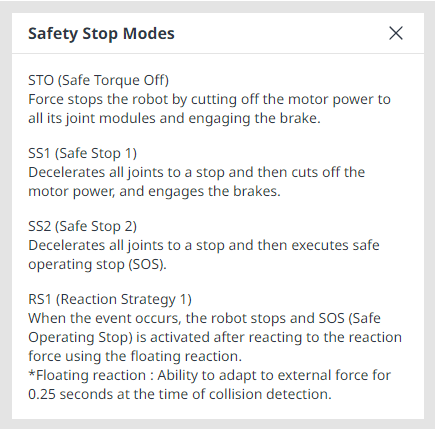
- STO (couple de sécurité désactivé) : Arrête Servo Off (l'alimentation du moteur est immédiatement coupée)
- SS1 (Arrêt sûr 1) : Servo désactivé après arrêt par décélération maximale
- SS2 (arrêt sécurisé 2) : Veille après arrêt en décélération maximale (pause)
- RS1 : En cas de collision, il se déplace dans la direction opposée à celle de la collision, puis entre en veille (ne peut être défini que dans détection de collision/violation de limite de force TCP)
Les robots Doosan Robotics ont deux types de fonctions d'arrêt de sécurité. L'arrêt d'urgence est utilisé pour les situations d'urgence générales, et le robot peut reprendre le fonctionnement avec Servo on après avoir relâché l'arrêt d'urgence. En cas d'arrêt de protection, le robot peut reprendre le fonctionnement en résolvant la cause de l'arrêt de protection et en relâchant l'arrêt.
- Arrêt d'urgence : Il définit le mode d'arrêt lorsque le bouton d'arrêt d'urgence de la télécommande d'apprentissage ou d'un dispositif externe supplémentaire est activé
- Il s'active lorsque l'on appuie sur l'interrupteur d'arrêt d'urgence de la télécommande d'apprentissage ou sur celui connecté à la borne EM TBSFT.
- Seuls STO ou SS1 peuvent être sélectionnés.
- Butée de protection : Il définit le mode d'arrêt lorsque l'équipement de protection connecté en externe est activé
- Il s'active lorsque l'équipement de protection connecté à la borne PR TBSFT est activé.
Pour plus d'informations sur les fonctions d'arrêt de sécurité, reportez-vous à la (3.2.0-fr_FR) Fonction de sécurité.
Comment engager/désengager la butée de sécurité
Appuyer sur le bouton d'arrêt d'urgence de la télécommande d'apprentissage ou activer le dispositif de sécurité connecté à l'E/S de sécurité pour activer l'arrêt d'urgence. Les dispositifs de sécurité peuvent être connectés à l'arrêt d'urgence ou à l'arrêt de protection via les fonctions Workcell Manager > robot > Safety I/O de l'écran de la poignée de commande d'apprentissage.
- Pour plus d'informations sur la connexion d'un dispositif de sécurité aux E/S de sécurité, reportez-vous à la section connexion d'E/S de contrôleur.
- Pour plus d'informations sur la configuration de la fonction d'arrêt de sécurité pour cette connexion dans le programme, voir E/S signal de sécurité.
Options de menu
| Article | Description | |
|---|---|---|
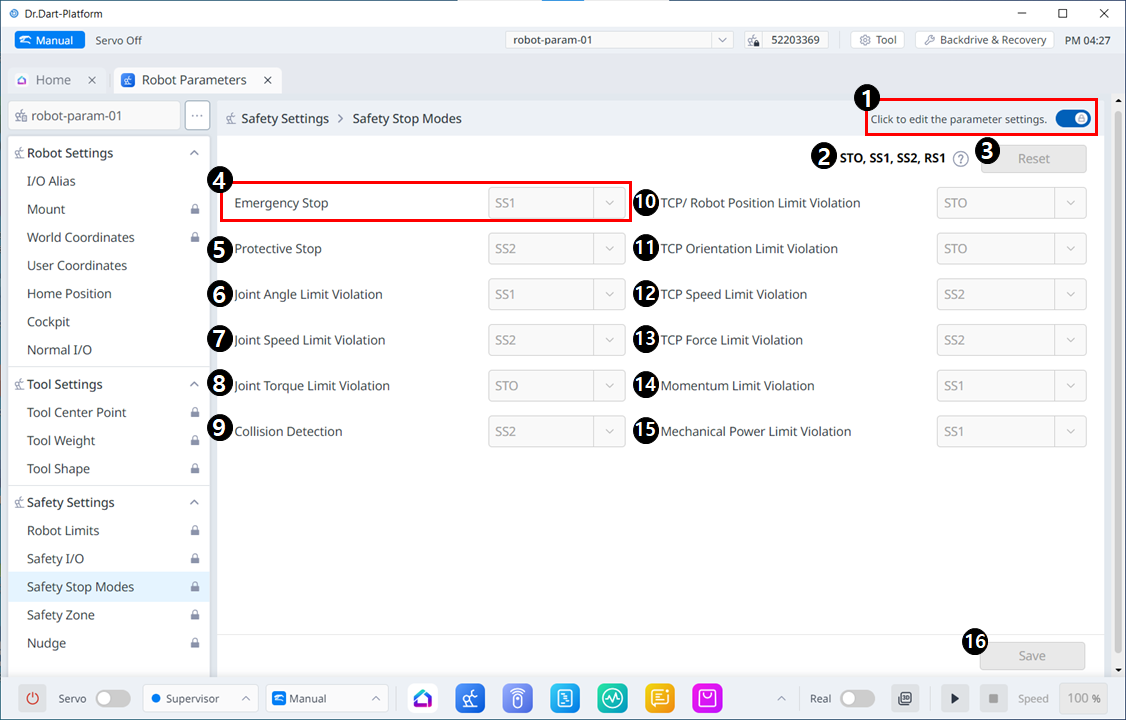
| 1 | Bouton à bascule de verrouillage | Permet de verrouiller la valeur définie. Le mot de passe de sécurité est requis pour modifier la valeur définie. |
| 2 | Message d'information | Un message fournissant les informations nécessaires pour le réglage. |
| 3 | Réinitialiser | Bouton permettant de réinitialiser les paramètres. |
| 4 | Arrêt d'urgence | Un arrêt de sécurité peut être sélectionné pour être utilisé pour l'élément correspondant. Le menu déroulant comprend les éléments suivants : STO SS1 |
| 5 | Butée de protection | Un arrêt de sécurité peut être sélectionné pour être utilisé pour l'élément correspondant. Le menu déroulant comprend les éléments suivants : SS1 SS2 |
| 6 | Violation de la limite d'angle de joint | Un arrêt de sécurité peut être sélectionné pour être utilisé pour l'élément correspondant. Le menu déroulant comprend les éléments suivants : STO SS1 SS2 |
| 7 | Violation de la limite de vitesse du joint | Un arrêt de sécurité peut être sélectionné pour être utilisé pour l'élément correspondant. Le menu déroulant comprend les éléments suivants : STO SS1 SS2 |
| 8 | Violation de la limite de couple de joint | STO만 가능합니다. |
| 9 | Détection de collision | Un arrêt de sécurité peut être sélectionné pour être utilisé pour l'élément correspondant. Le menu déroulant comprend les éléments suivants : STO SS1 SS2 RS1 |
| 10 | Violation de la limite de position du robot TCP | Un arrêt de sécurité peut être sélectionné pour être utilisé pour l'élément correspondant. Le menu déroulant comprend les éléments suivants : STO SS1 SS2 |
| 11 | Violation de la limite d'orientation TCP | Un arrêt de sécurité peut être sélectionné pour être utilisé pour l'élément correspondant. Le menu déroulant comprend les éléments suivants : STO SS1 SS2 |
| 12 | Violation de la limite de vitesse TCP | Un arrêt de sécurité peut être sélectionné pour être utilisé pour l'élément correspondant. Le menu déroulant comprend les éléments suivants : STO SS1 SS2 |
| 13 | Violation de limite de force TCP | Un arrêt de sécurité peut être sélectionné pour être utilisé pour l'élément correspondant. Le menu déroulant comprend les éléments suivants : STO SS1 SS2 |
| 14 | Violation de la limite d'élan | Un arrêt de sécurité peut être sélectionné pour être utilisé pour l'élément correspondant. Le menu déroulant comprend les éléments suivants : STO SS1 SS2 |
| 15 | Violation de la limite mécanique | Un arrêt de sécurité peut être sélectionné pour être utilisé pour l'élément correspondant. Le menu déroulant comprend les éléments suivants : STO SS1 SS2 |
| 16 | Enregistrer | Ce bouton vous permet d'enregistrer les valeurs de réglage. |
La fenêtre contextuelle suivante apparaît sur le message d'information :