
Définition des limites du robot
Dans limites du robot, différentes limites associées au robot peuvent être définies. Ces limites sont utilisées pour garantir que le robot fonctionne en toute sécurité dans les limites définies.
Les limites du robot peuvent être définies dans Paramètres du robot > Paramètres de sécurité > limites du robot.
- Pour une description détaillée de chaque limite, voir Limites du robot .
Les limites du robot sont largement divisées en 3 catégories. Chaque catégorie comprend les écrans et fonctions suivants.
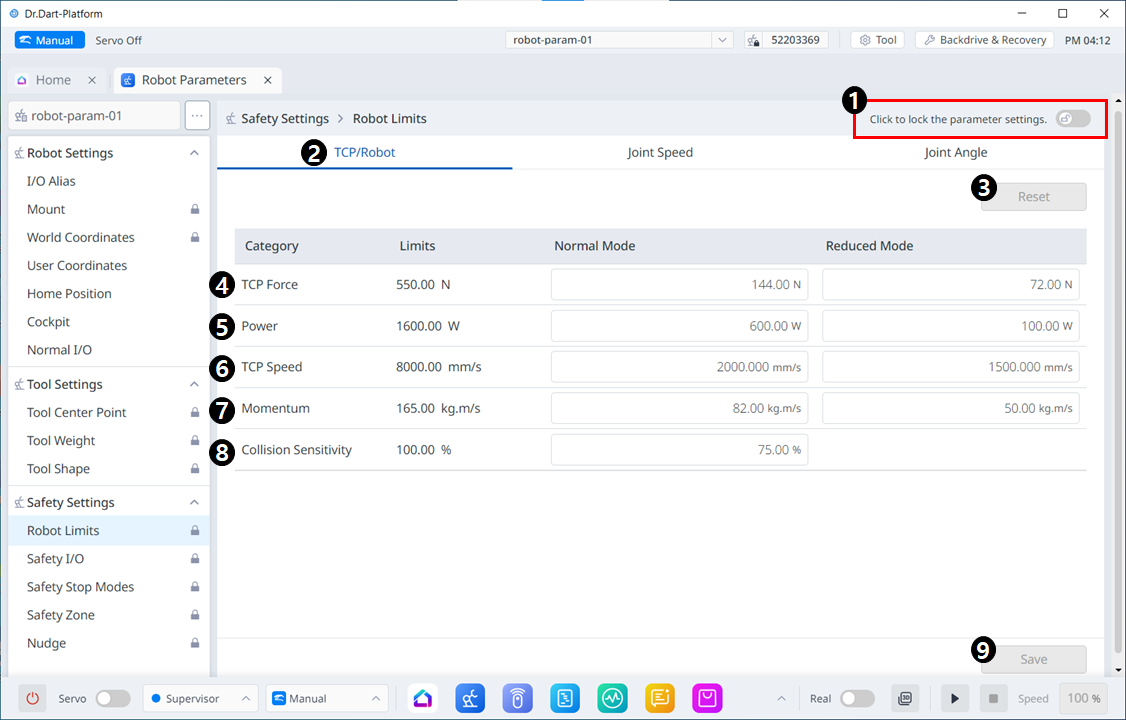
Options de menu
| Article | Description | |
|---|---|---|
| 1 | Bouton à bascule de verrouillage | Permet de verrouiller la valeur définie. Le mot de passe de sécurité est requis pour modifier la valeur définie. |
| 2 | TCP/robot | Grande classification des limites du robot. |
| 3 | Réinitialiser | Permet de réinitialiser les paramètres. |
| 4 | Force | Permet de définir la force. |
| 5 | Puissance | Permet de régler la puissance. |
| 6 | Vitesse | Permet de régler la vitesse. |
| 7 | Élan | Utilisé pour définir l'élan. |
| 8 | Collision | Permet de définir la collision. |
| 9 | Enregistrer | Permet d'enregistrer le paramètre applicable. |
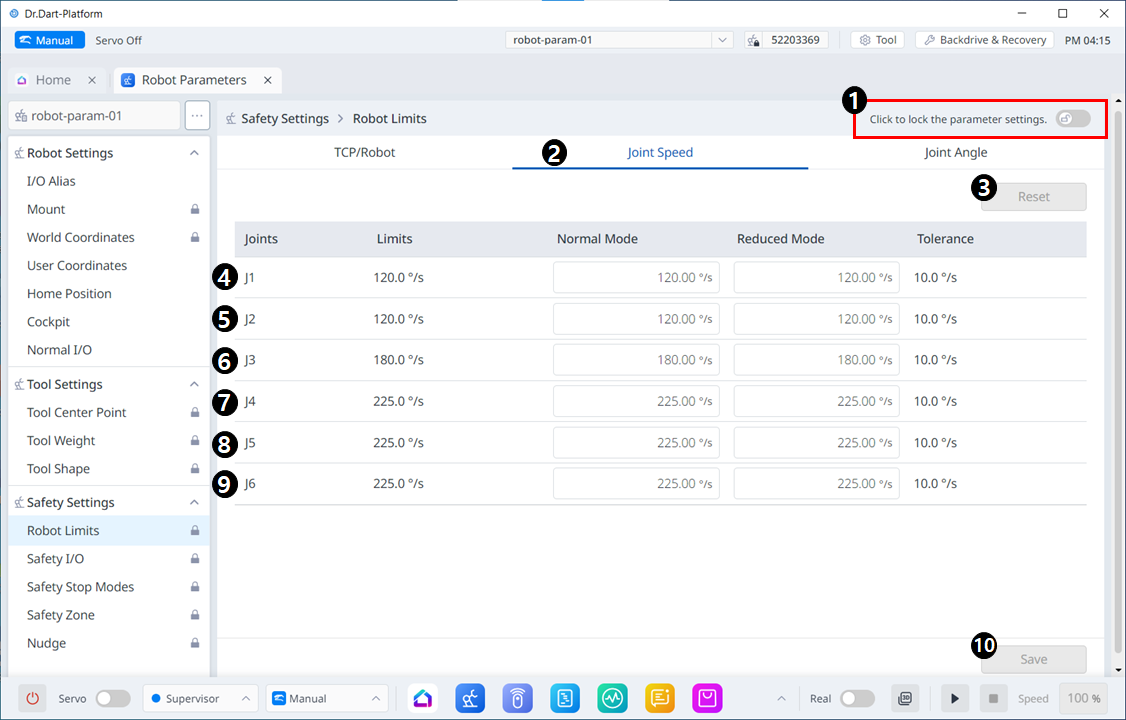
Options de menu
| Article | Description | |
|---|---|---|
| 1 | Bouton à bascule de verrouillage | Permet de verrouiller la valeur définie. Le mot de passe de sécurité est requis pour modifier la valeur définie. |
| 2 | Vitesse du joint | Grande classification des limites du robot. |
| 3 | Réinitialiser | Permet de réinitialiser les paramètres. |
| 4 | J1 | Permet de définir les paramètres des modes Normal et réduit respectivement. |
| 5 | J2 | Permet de définir les paramètres des modes Normal et réduit respectivement. |
| 6 | J3 | Permet de définir les paramètres des modes Normal et réduit respectivement. |
| 7 | J4 | Permet de définir les paramètres des modes Normal et réduit respectivement. |
| 8 | J5 | Permet de définir les paramètres des modes Normal et réduit respectivement. |
| 9 | J6 | Permet de définir les paramètres des modes Normal et réduit respectivement. |
| 10 | Enregistrer | Permet d'enregistrer le paramètre applicable. |
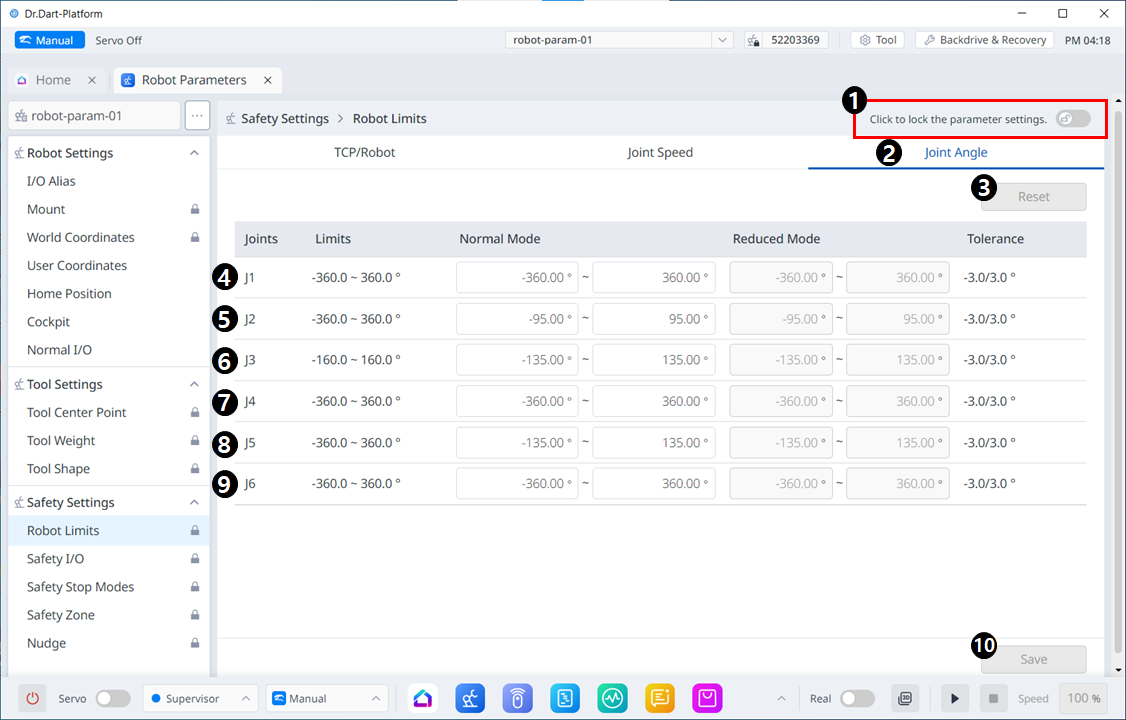
Options de menu
| Article | Description | |
|---|---|---|
| 1 | Bouton à bascule de verrouillage | Permet de verrouiller la valeur définie. Le mot de passe de sécurité est requis pour modifier la valeur définie. |
| 2 | Angle de joint | Grande classification des limites du robot. |
| 3 | Réinitialiser | Permet de réinitialiser les paramètres. |
| 4 | J1 | Permet de définir les paramètres des modes Normal et réduit respectivement. |
| 5 | J2 | Permet de définir les paramètres des modes Normal et réduit respectivement. |
| 6 | J3 | Permet de définir les paramètres des modes Normal et réduit respectivement. |
| 7 | J4 | Permet de définir les paramètres des modes Normal et réduit respectivement. |
| 8 | J5 | Permet de définir les paramètres des modes Normal et réduit respectivement. |
| 9 | J6 | Permet de définir les paramètres des modes Normal et réduit respectivement. |
| 10 | Enregistrer | Permet d'enregistrer le paramètre applicable. |