
Déplacer l'écran
Déplacer la disposition du menu
| Item | Description | |
|---|---|---|
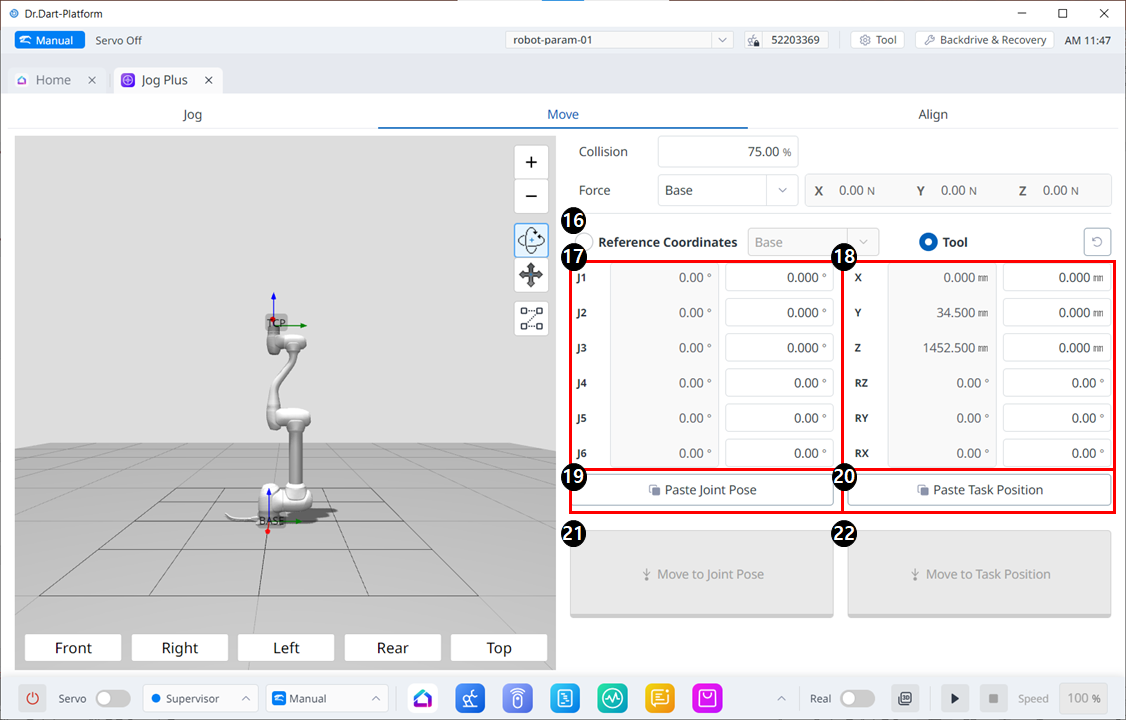
| 16 | Reference Coordinates | Sélectionnez le système de coordonnées de référence à utiliser pour les coordonnées de la tâche dans la figure 18. Vous pouvez choisir les coordonnées de base, universelles ou utilisateur. |
| 17 | Joint Posture | Affiche la posture actuelle du robot et la posture articulaire cible. |
| 18 | Task Posture | Affiche la posture actuelle du robot et la posture de la tâche cible qui correspondent au système de coordonnées de référence sélectionné. |
| 19 | Paste Joint Posture | Collez la valeur de posture copiée dans le presse-papiers dans le panneau de posture articulaire. |
| 20 | Paste Task Posture | Collez la valeur de posture copiée dans le presse-papiers dans le panneau de posture de la tâche. |
| 21 | Joint Move button | Ce bouton amène le robot à se déplacer vers la posture articulaire cible. |
| 22 | Task Move button | Ce bouton amène le robot à se déplacer vers la posture de tâche cible. |