
Paramètres de limite d'espace
Pour définir des limites d'espace pour le robot, appuyez sur le bouton Ajouter 
- Saisissez le nom de la cellule de travail dans le champ prévu à cet effet en haut de l'écran de paramètre de cellule de travail.
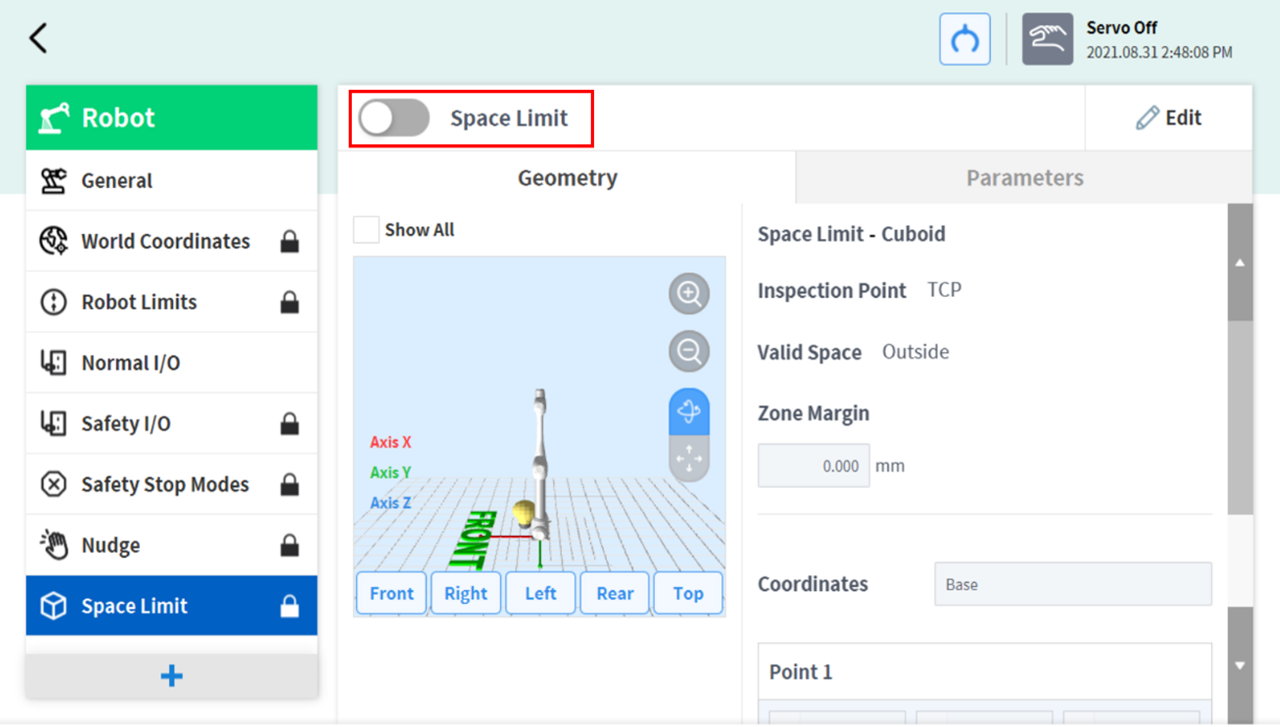
- Définissez les informations de position selon la forme de la Space limit (limite d'espace) ainsi que l'Inspection point (Point d'inspection), le Valid space (Espace valide) et la Zone margin (marge de zone) dans l'onglet Geometry (Géométrie).
- Définissez Dynamic Zone Enable (Activation de la zone dynamique) et Advanced Options (Options avancées) dans l'onglet Parameters (Paramètres), et appuyez sur Draft (Ébauche).
- Vérifiez que tous les paramètres affichés sont conformes aux besoins puis cochez la case Confirm draft (Confirmer ébauche) et appuyez sur Confirm (Confirmer).
- Appuyez sur le bouton à bascule Activer pour appliquer la limite d'espace.
Remarque
Des défauts de marge de zone sont présents selon les méthodes de configuration.
- Si la forme de l'outil est définie et que Body volume check (Contrôle du volume du corps) n'est pas sélectionné, la marge TCP est de 0 mm.
- Si la forme de l'outil est définie et que Body volume check (Contrôle du volume du corps) est sélectionné, la marge TCP est de 0 mm.
- Si la forme de l'outil n'est pas définie et que Body volume check (Contrôle du volume du corps) n'est pas sélectionné, la marge TCP est de 0 mm.
- Si la forme de l'outil n'est pas définie et que Body volume check (Contrôle du volume du corps) est sélectionné, la marge TCP est de 60 mm.