
Configuration de Tool Center Point (point central de l'outil ) (TCP)
Lors de la configuration du point central de l'outil (TCP), la position et l'angle de rotation doivent également être définis sur la base des coordonnées de la bride. La distance définie séparant le point de départ par défaut des coordonnées de la bride du point central de l'outil (TCP) dans les directions X, Y et Z ne peut pas excéder 10000 mm. En outre, si les longueurs converties (
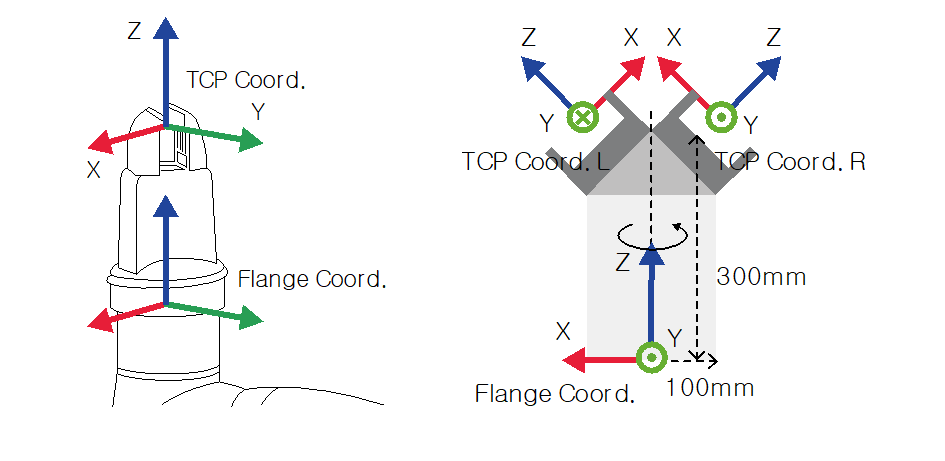
Plus particulièrement, si le TCP est configuré à l'aide de l'option Auto Calculate (Calcul auto), le calcul est uniquement réalisé en fonction des positions X, Y et Z. C'est pourquoi, il est nécessaire de saisir l'angle de rotation. L'angle de rotation peut être défini à l'aide des éléments A, B et C, sur la base de la méthode de rotation d'Euler Z-Y-Z.
La définition de l'axe des coordonnées exprimé par « x, y, z » et de l'axe des coordonnées exprimé par « X, Y, Z » est la suivante :
- Axe des « coordonnées de la bride » (x, y, z) : la direction de l'axe des coordonnées définie à l'extrémité de la bride est identique aux coordonnées du robot avec un angle de l'articulation du robot égal à (0,0,0,0,0,0).
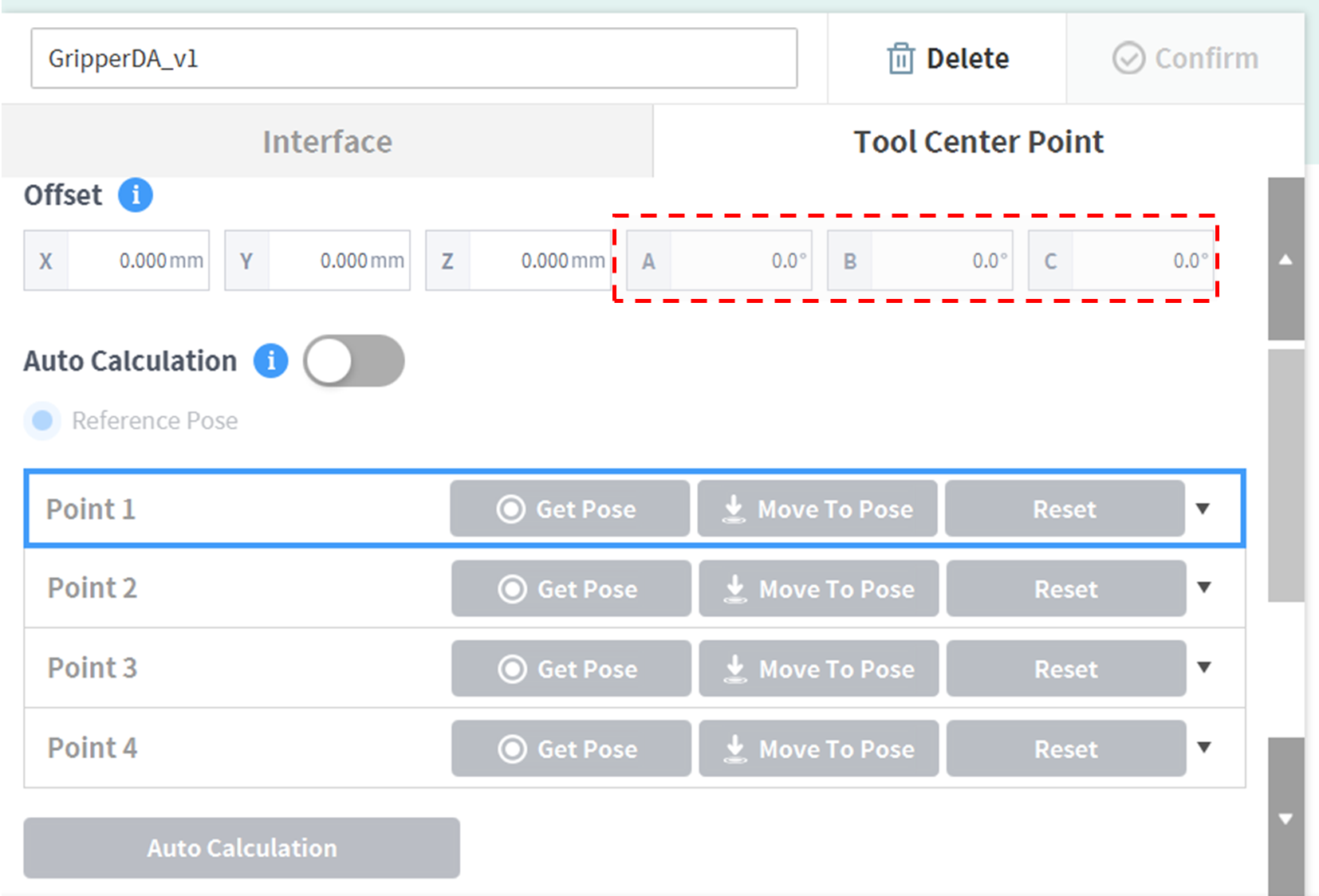
- Axe des « coordonnées du TCP » (X,Y,Z) : l'axe de coordonnées est défini à l'extrémité de l'outil installé sur l'extrémité de la bride ou du point de travail. L'angle de rotation des « coordonnées du TCP » est défini en fonction des « coordonnées de la bride » dans l'ordre des rotations 1) à 3) suivantes :
1) Rotation de A degrés sur l'axe z des coordonnées de la bride
2) Rotation de B degrés sur l'axe y' des coordonnées en fonction de la rotation 1)
3) Rotation de C degrés sur l'axe z' des coordonnées en fonction de la rotation 2)
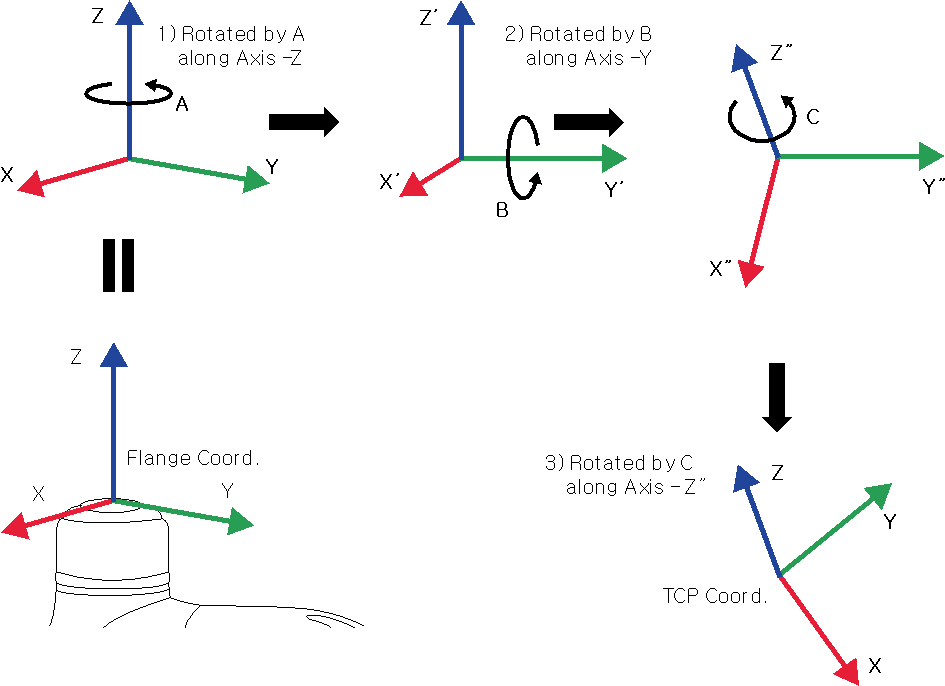
Voici quelques exemples de configuration du TCP selon la méthode décrite ci-dessus :
- [X, Y, Z, A, B, C] = [0, 0, 100, 0, 0, 0] : pince de préhension générale avec décalage de la direction Z (coord. TCP)
- [X, Y, Z, A, B, C] = [100, 0, 300, 180, -45, 0] : pince gauche à un angle de 45 degrés (coord. TCP gauche)
- [X, Y, Z, A, B, C] = [-100, 0, 300, 0, -45, 0] : pince droite à un angle de 45 degrés (coord. TCP droite)