
Fonctionnement manuel - Apprenez à effectuer un apprentissage direct
OBLIGATOIRE FACILE 5 MIN

L'apprentissage direct est utilisé pour tenir l'extrémité du robot avec les mains pour pousser et tirer le robot jusqu'à la position souhaitée, et appliquer la pose au mouvement actuellement sélectionné. Il existe deux méthodes d'enseignement direct.
- Freedrive : Chaque liaison se déplace dans la direction de la force appliquée par l'utilisateur
- Mouvement contraint : L'extrémité du robot se déplace ou tourne uniquement dans la direction définie dans le mouvement contraint, même lorsque la force est appliquée dans une direction aléatoire
Freedrive
Lorsque le bouton 1 est enfoncé, le mode Freedrive est activé, ce qui permet au robot d'être déplacé librement. Chaque liaison se déplace dans la direction de la force appliquée par l'utilisateur. Le robot ne peut pas être déplacé manuellement une fois le bouton relâché.
- Pendant l'apprentissage direct, le voyant du robot clignote en cyan.
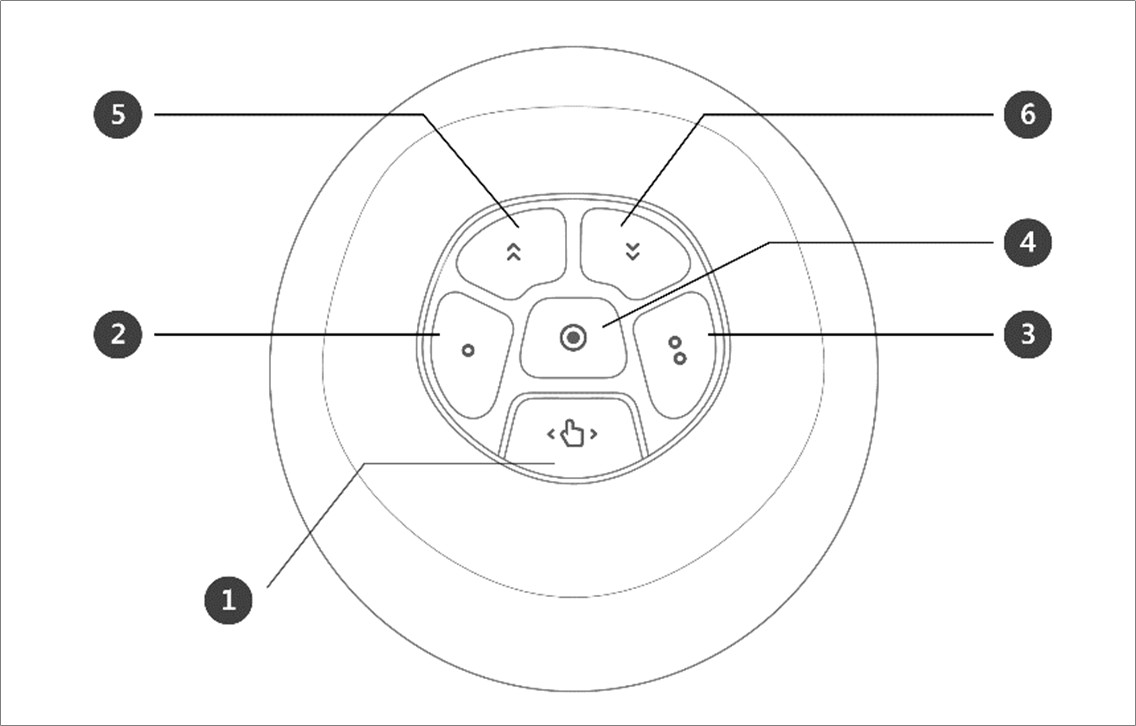
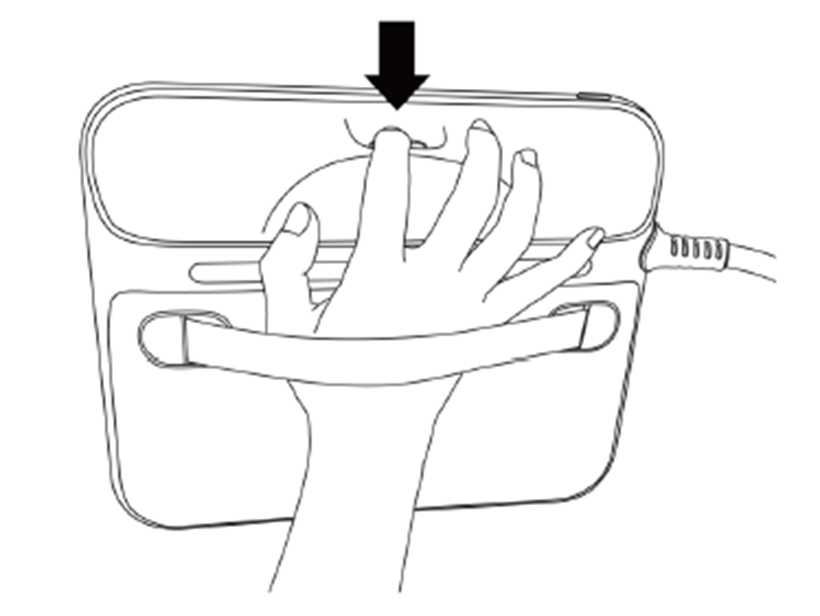
Appuyer sur le bouton du guide de la main à l'arrière de la poignée de commande d'apprentissage pour activer le mode Freedrive, tout comme appuyer sur le bouton 1, et le robot peut être déplacé librement.
Pour plus d'informations sur chaque fonction de bouton, reportez-vous à Fonctionnement en guidage manuella section .
Mouvement contraint
Lorsque les boutons 2 et 3 sont enfoncés, l'extrémité du robot se déplace uniquement dans la direction correspondant à la condition de contrainte, même lorsque la force est appliquée dans une direction aléatoire. La condition de contrainte peut être définie avec 2 sur 4 des conditions dans la figure suivante : Axe Z contraint, plan fixe contraint, surface contrainte et direction contrainte.