Essayez de forcer les échantillons de commande
FACULTATIF NORMAL 20 MIN

Cet exemple est créé dans l'enregistreur de tâches. Cet exemple peut être essayé presque de la même manière dans le Créateur de tâches.
Attention
- Avant d'essayer l'échantillon, assurez-vous de lire et de suivre Précautions d'emploi. Pour plus d'informations, reportez-vous à PARTIE 1. Manuel de sécuritéla section .
- Cet exemple nécessite le fichier Task Writer créé dans Essayez des exemples de commandes de conformité.
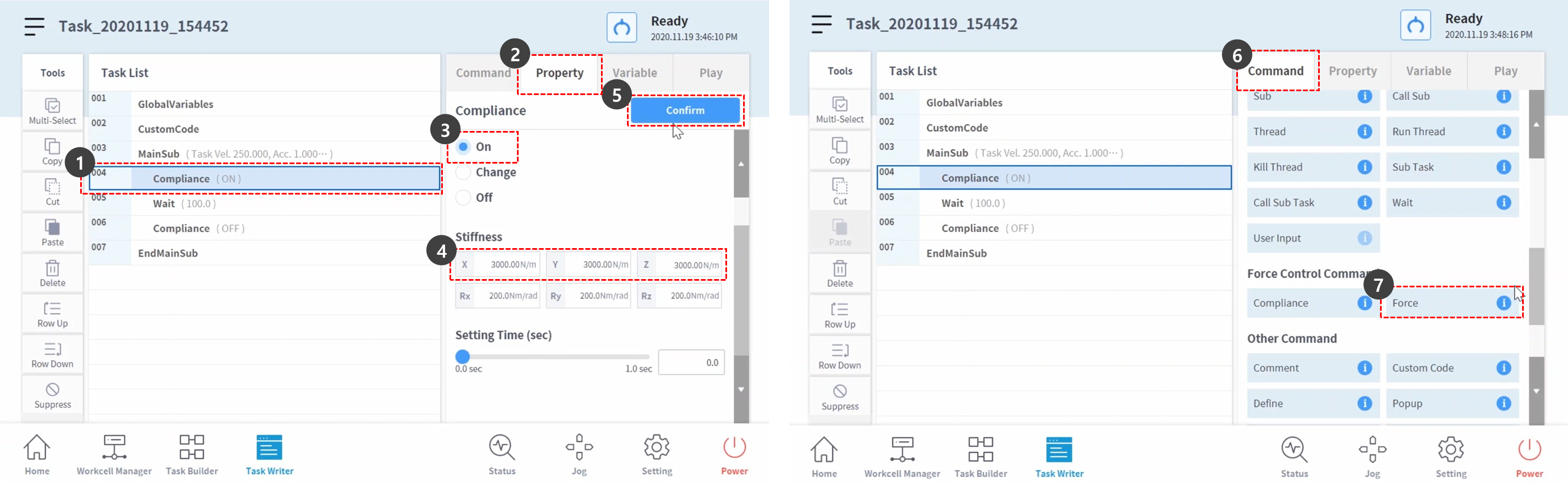
- Essayez des exemples de commandes de conformité Ouvrez le fichier Task Writer créé et sélectionnez la commande de conformité sur la quatrième ligne de la liste des tâches.
- Sélectionnez l'onglet propriété.
- Définissez le mode comme suit : Le mode activé active le contrôle de conformité. La commande forcer est disponible uniquement lorsque le contrôle de conformité est activé.
- Mode : Activé
- Définissez la valeur de raideur par défaut comme suit :
- X, Y, Z : 3000 N/m (par défaut)
- Rx, Ry, Rz : 200 Nm/rad (par défaut)
- Appuyer sur le bouton confirmer.
- Sélectionnez l'onglet commande.
- Ajouter une commande de force. Cette commande est prévue pour être utilisée pour activer le contrôle de force.
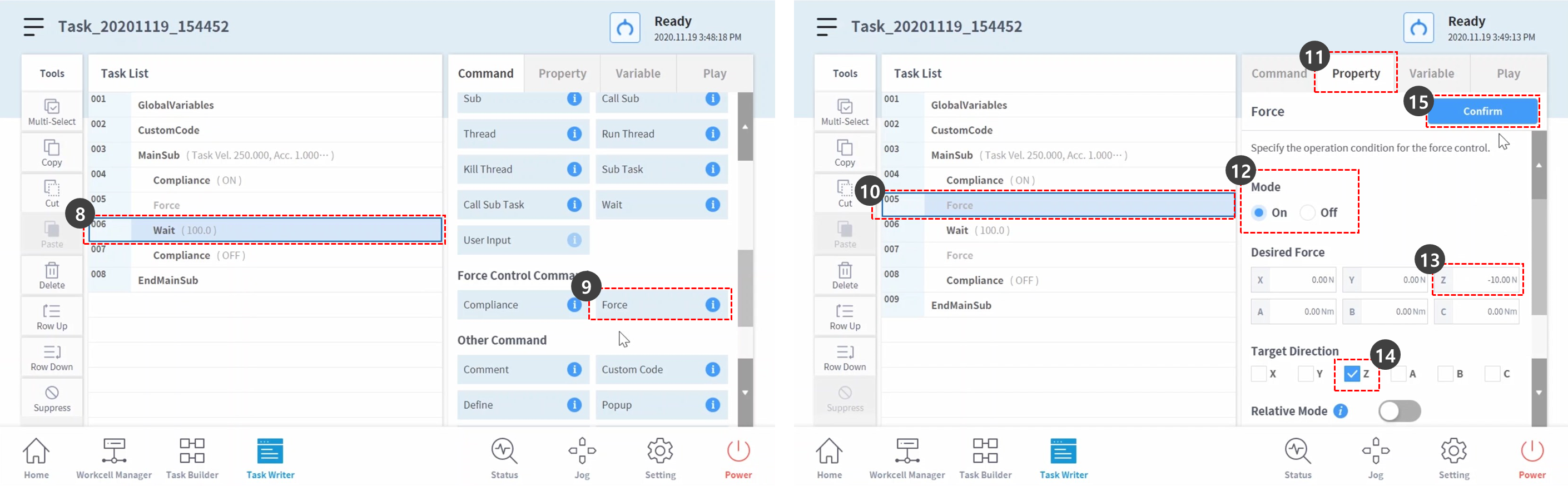
- Sélectionnez la sixième ligne de la liste des tâches.
- Ajouter une commande de force. Cette commande est prévue pour être utilisée pour désactiver le contrôle de force.
- Sélectionnez la commande force sur la cinquième ligne de la liste des tâches.
- Sélectionnez l'onglet propriété.
- Définissez le mode comme suit : Le mode activé active le contrôle de force.
- Mode : Activé
- Définissez la force souhaitée comme suit :
- X : 0 N (par défaut)
- Y : 0 N (par défaut)
- Z : -10 N
- Rx, Ry, Rz : 200 Nm/rad (par défaut)
- Cochez uniquement l'axe Z dans la direction cible.
- Appuyer sur le bouton confirmer.
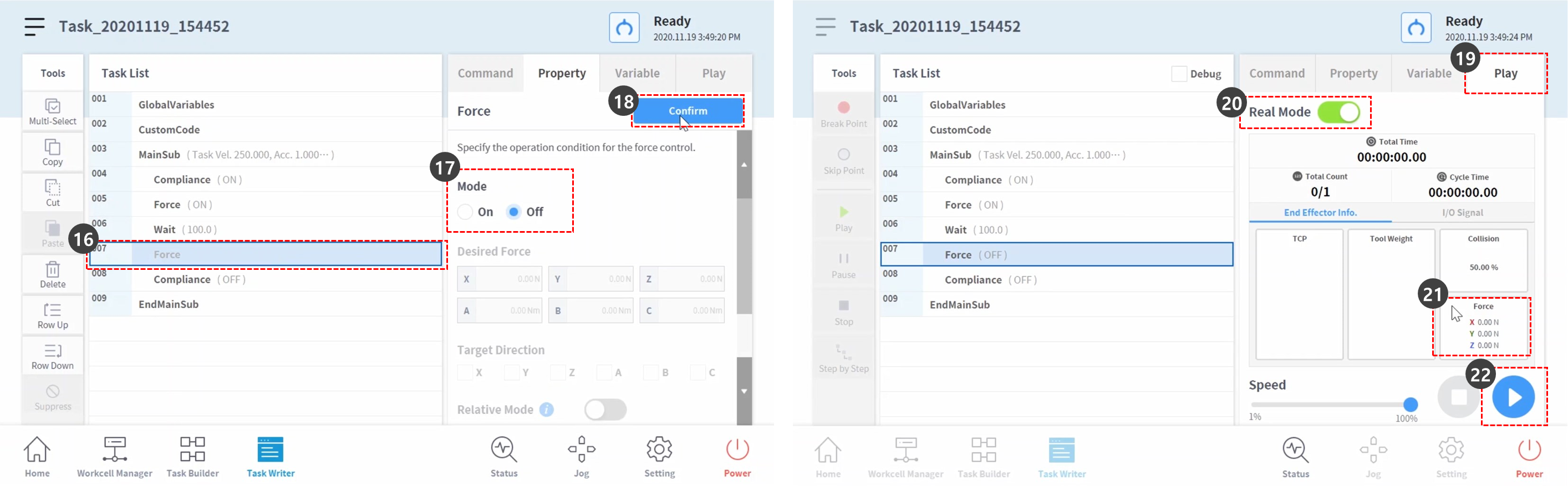
- Sélectionnez la commande Force sur la septième ligne de la liste des tâches.
- Définissez le mode comme suit : Le mode désactivé désactive le contrôle de force.
- Mode : Arrêt
- Appuyer sur le bouton confirmer.
- Sélectionnez l'onglet lecture.
- Activez le bouton bascule mode réel.
- Une fois le bouton bascule activé, il s'allume en vert.
- Vérifiez si la force TCP de chaque axe est de 0. Cette valeur de force est la taille de la force externe actuellement appliquée sur le TCP d'extrémité du robot.
- Appuyez sur le bouton lecture.
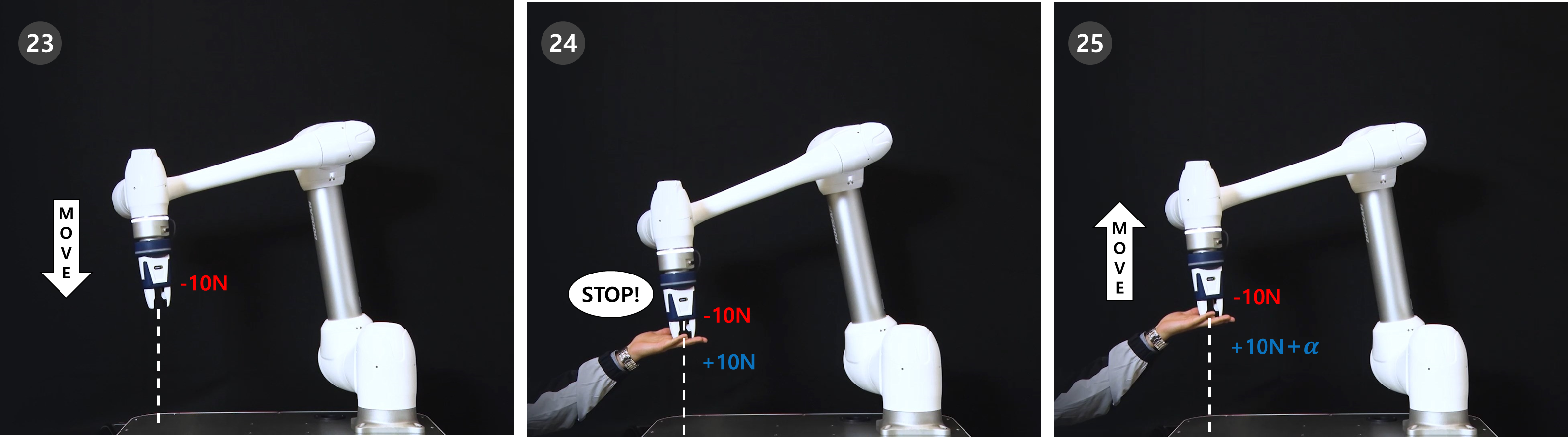
- -10N de force est appliquée sur le TCP de l'extrémité du robot, ce qui entraîne un déplacement lent du robot dans la direction de l'axe Z.
- L'extrémité du robot repousse le mouvement du robot dans la direction de l'axe +Z, à l'opposé de la direction du mouvement du robot. Lorsque la force qui déplace le robot et la force qui repousse le mouvement du robot atteignent un équilibre, le robot conserve sa position comme s'il s'était arrêté.
- Si une force supérieure à +10N est appliquée sur le robot, celui-ci se conformera à la force appliquée sur le robot et se déplacera dans la direction de la force.