Essayez des exemples de commandes de conformité
FACULTATIF NORMAL 20 MIN

Cet exemple est créé dans l'enregistreur de tâches. Cet exemple peut être essayé presque de la même manière dans le Créateur de tâches.
Attention
- Avant d'essayer l'échantillon, assurez-vous de lire et de suivre Précautions d'emploi. Pour plus d'informations, reportez-vous à PARTIE 1. Manuel de sécuritéla section .
Remarque
- Si le couple externe est supérieur ou égal à 15Nm lors de l'activation ou de la désactivation du contrôle de conformité, le robot arrête le programme en raison d'une erreur du capteur de couple de joint (JTS).
- La modification de la raideur peut être exécutée quelle que soit la taille du couple externe.
- Pendant le contrôle de conformité, les mouvements de joint, tels que la commande MoveJ, ne peuvent pas être exécutés.
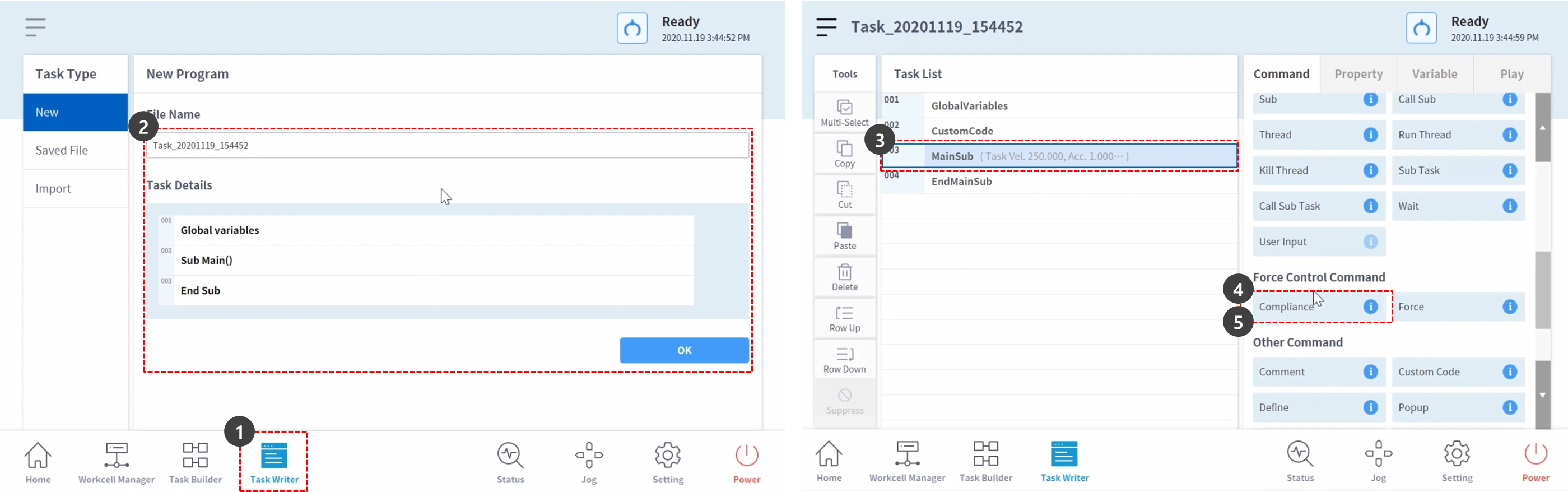
- Sélectionnez Task Writer dans le menu inférieur.
- Entrez le nom de la tâche et appuyez sur le bouton OK.
- Sélectionnez la commande MainSub sur la troisième ligne de la liste des tâches. Une nouvelle commande est ajoutée à la ligne suivante de la ligne sélectionnée.
- Ajouter une commande de conformité. Cette commande est prévue pour être utilisée pour activer le contrôle de conformité.
- Ajouter un autre contrôle de conformité. Cette commande est prévue pour être utilisée pour désactiver le contrôle de conformité.
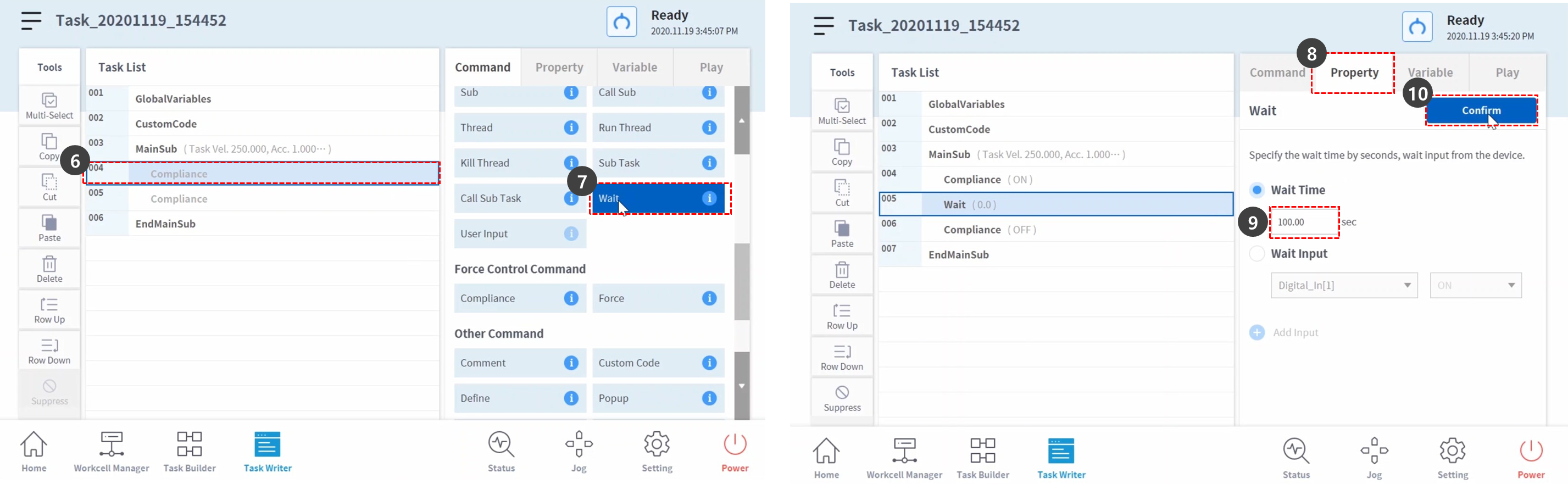
- Sélectionnez la commande conformité sur la quatrième ligne. Une nouvelle commande est ajoutée à la ligne suivante de la ligne sélectionnée.
- Ajouter une commande d'attente.
- Sélectionnez l'onglet propriété.
- Définissez le temps d'attente comme suit :
- Temps d'attente : 100 secondes
- Appuyer sur le bouton confirmer.
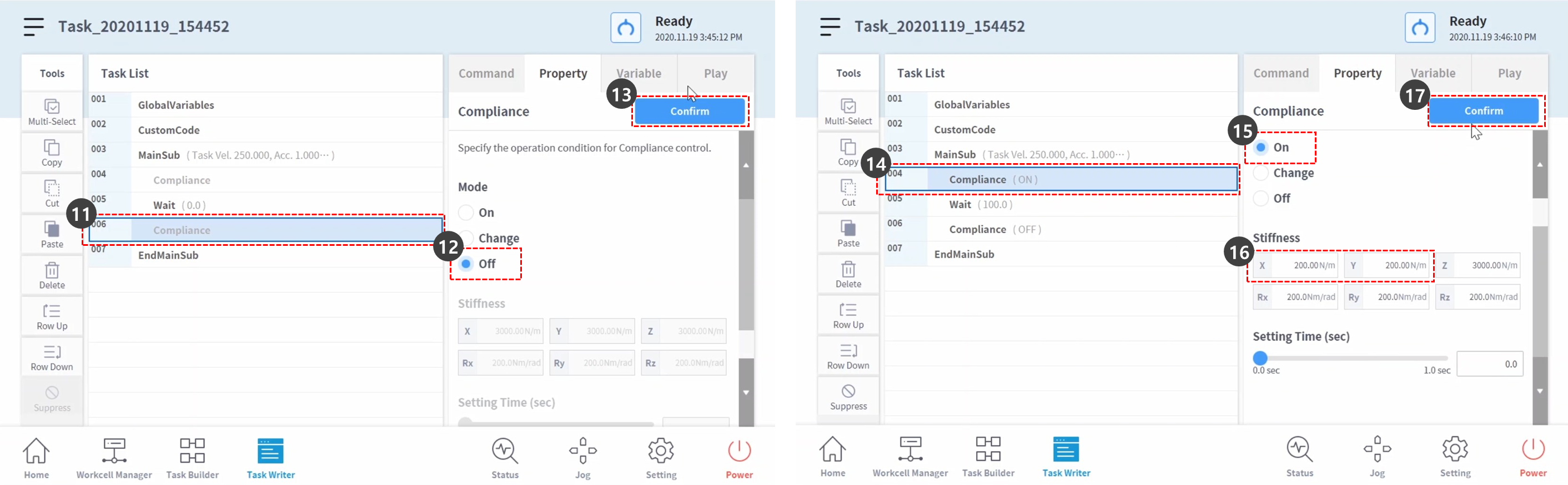
- Sélectionnez la commande conformité sur la sixième ligne.
- Définissez le mode dans la propriété comme suit : Le mode désactivé désactive le contrôle de conformité.
- Mode : Arrêt
- Appuyer sur le bouton confirmer.
- Sélectionnez la commande conformité sur la quatrième ligne.
- Définissez le mode dans la propriété comme suit : Le mode activé active le contrôle de conformité.
- Mode : Activé
- Définissez la raideur comme suit : Diminuez la raideur des directions X et y pour des réactions plus douces dans les directions X et Y.
- X : 200 N/m
- Y : 200 N/m
- Z : 3000 N/m (par défaut)
- Rx, Ry, Rz : 200 Nm/rad (par défaut)
- Appuyer sur le bouton confirmer.
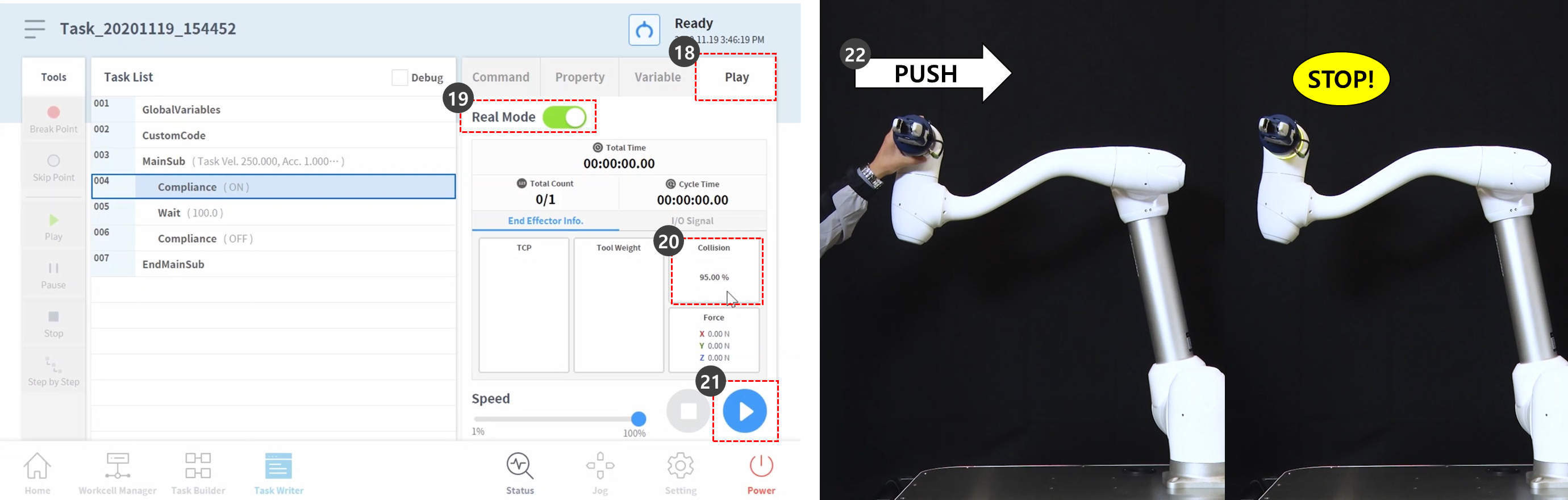
- Sélectionnez l'onglet lecture.
- Activez le bouton bascule mode réel.
- Une fois le bouton bascule activé, il s'allume en vert.
- Cet exemple activera délibérément l'arrêt de sécurité pour expliquer la raison de la réduction de la sensibilité aux collisions pendant le contrôle de conformité. La sensibilité à la collision de cet échantillon est de 95 %. Dans les cas où la sensibilité aux collisions est si élevée, le robot réagit très intelligemment aux collisions.
- En cas de collision, le robot est arrêté par l'arrêt de sécurité.
- Appuyez sur le bouton lecture.
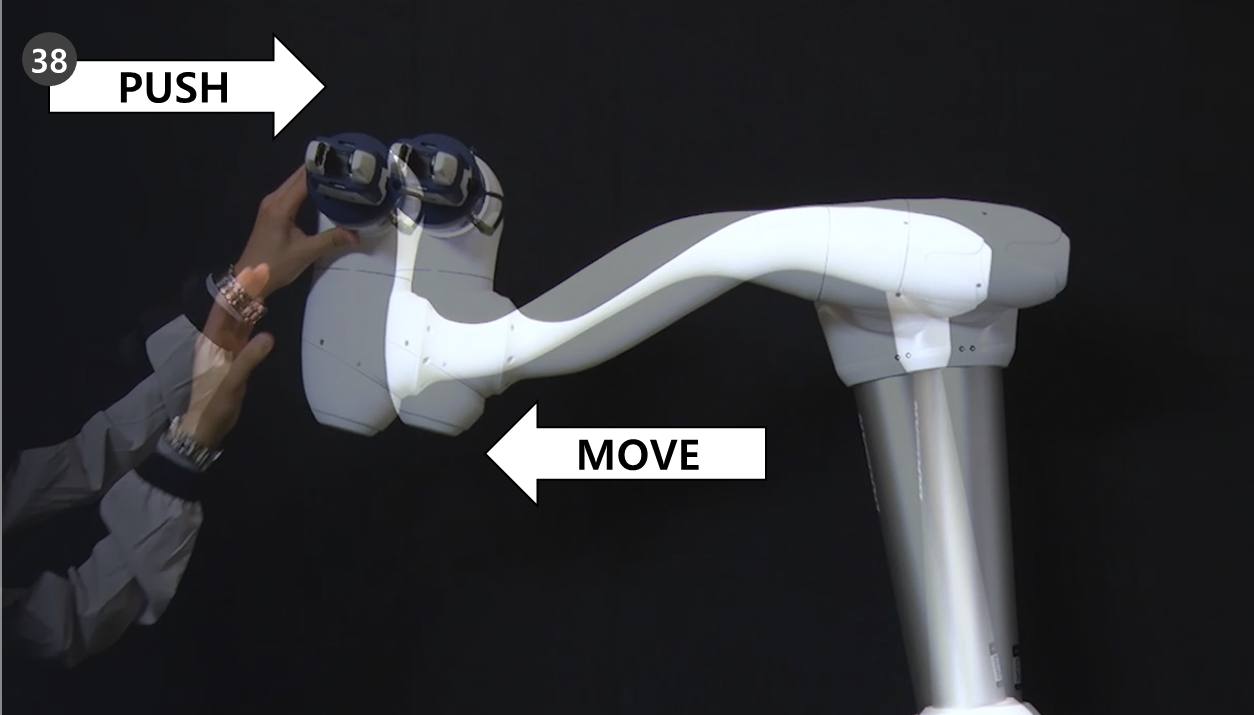
- Tenez l'extrémité du robot et poussez-la lentement dans la direction du corps du robot. Le robot s'arrête en raison d'une erreur de collision. Lors d'un arrêt de sécurité en raison d'une collision, la LED du robot s'allume en jaune.
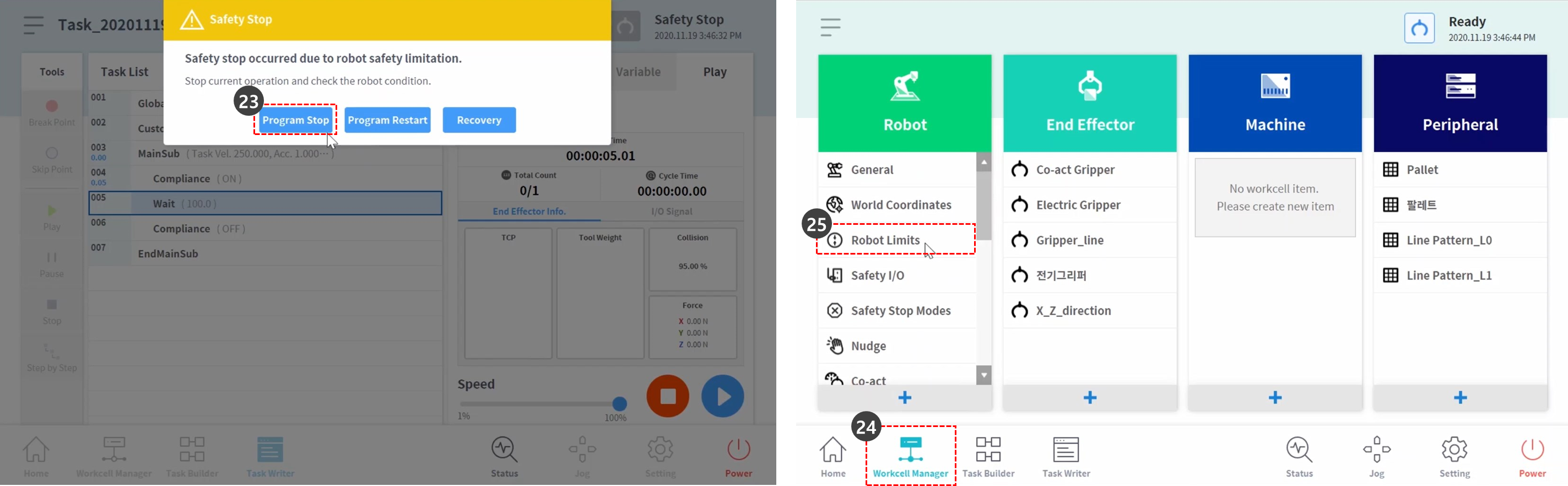
- Appuyez sur le bouton d'arrêt du programme dans la fenêtre d'avertissement jaune d'arrêt de sécurité à l'écran. Le programme de tâches en cours est arrêté.
- Sélectionnez le Gestionnaire de cellules de travail dans le menu inférieur.
- Sélectionner robot > limites du robot.
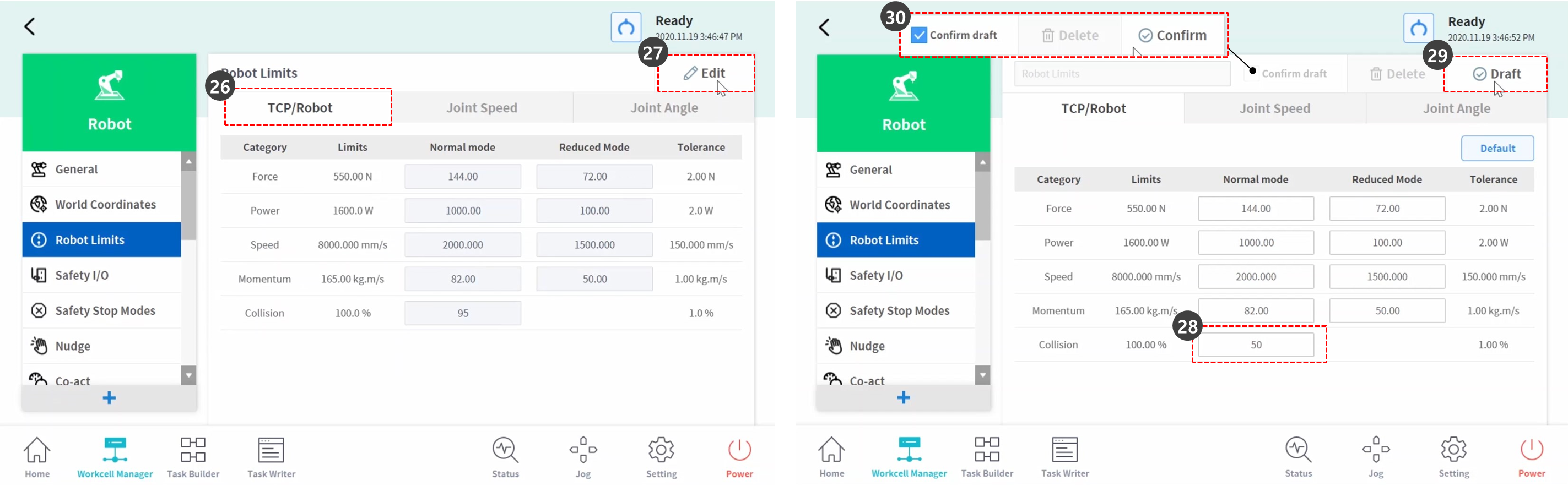
- Sélectionnez l'onglet TCP/robot.
- Appuyez sur le bouton Modifier.
- Définissez la sensibilité de collision comme suit :
- Mode normal : 50 %
- Appuyez sur le bouton Brouillon.
- Cochez la case confirmer brouillon et appuyez sur le bouton confirmer.
- Sélectionnez Task Writer dans le menu inférieur.
- Sélectionnez le fichier enregistré sur l'écran de gauche.
- Vérifiez si le premier nom de fichier de tâche correspond au nom de tâche à l'étape 2 avant de sélectionner. La dernière tâche enregistrée se trouve en haut de la liste de fichiers de l'enregistreur de tâches.
- Appuyez sur le bouton Ouvrir.
- Sélectionnez l'onglet lecture.
- Activez le bouton bascule mode réel.
- Appuyez sur le bouton lecture.
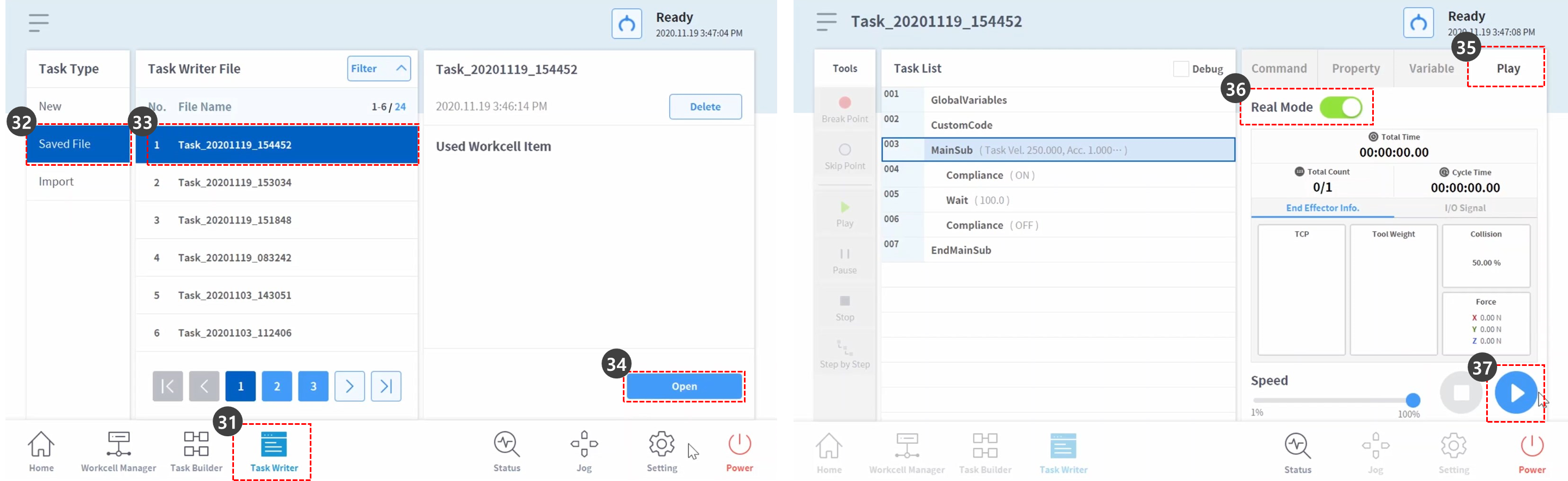
- Tenez l'extrémité du robot et poussez-la lentement dans la direction du corps du robot. Le robot se déplace en raison de la force de poussée et revient à sa position d'origine.