
Écran Real Mode (Mode réel) : onglet End Effector Information (Informations sur l'effecteur final)
L'écran Real Mode (Mode réel) présentant les informations sur l'effecteur final de Task Builder (Générateur de tâches) est structuré comme suit :
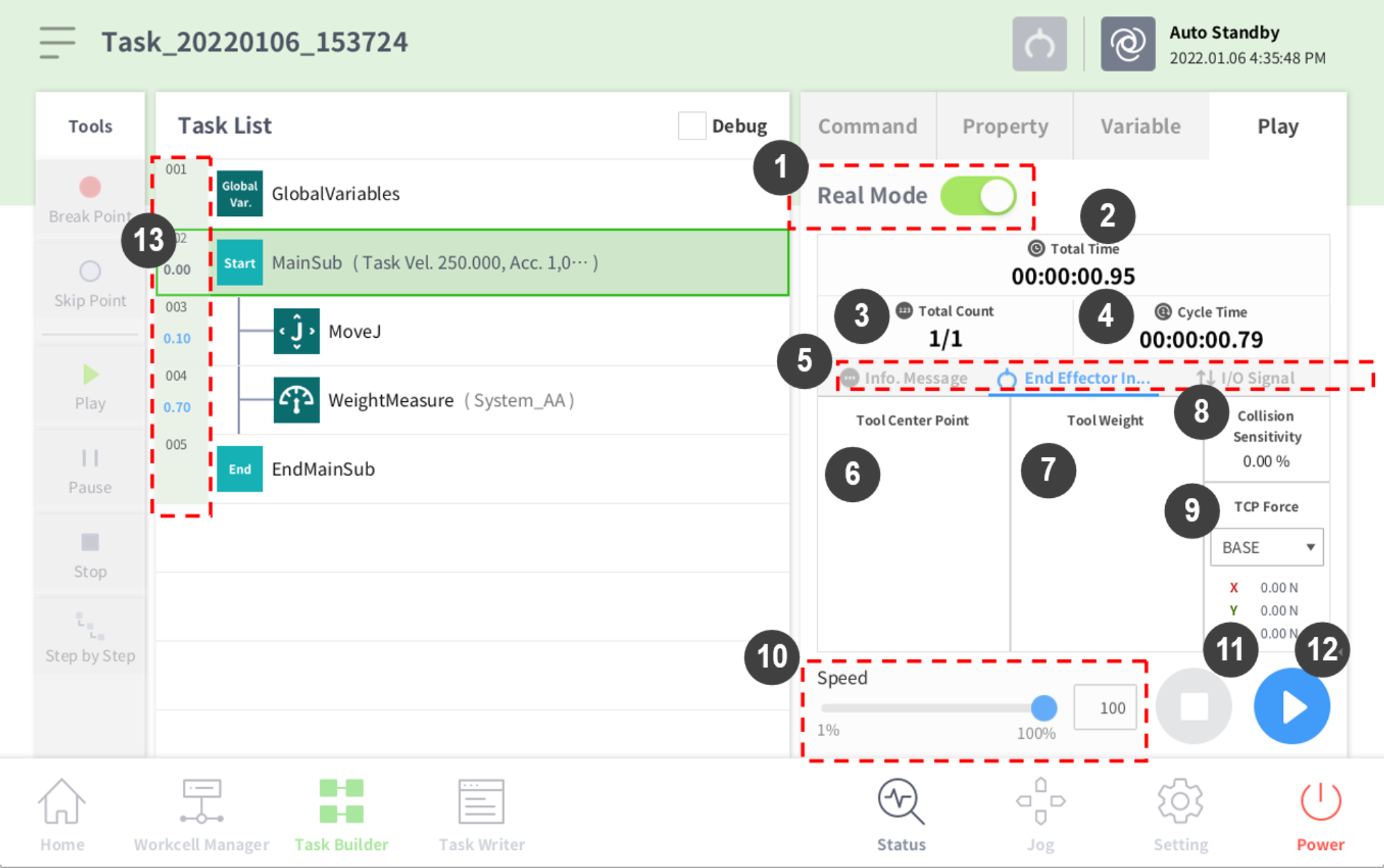
N° | Élément | Description |
1 | Real Mode ( | Définition du mode de lecture de test du robot.
|
2 | Total time | Affiche la durée totale écoulée depuis l'exécution de la tâche. |
3 | Total count | Affichage du nombre total d'exécutions de tâches. |
4 | Average execution time | Affichage de la durée moyenne passée pour l'exécution d'un cycle de la tâche dans la liste des tâches. |
5 | Information Screen Shift Tab | Vous pouvez basculer entre l'écran de message d'informations sur le robot, l'écran d'informations sur l'effecteur terminal et l'écran d'informations d'entrée/sortie.
|
6 | Tool center point information area | Affichage des informations du TCP configurées à l'aide des fonctions de configuration du TCP et du poids de la commande du TCP définie ou du jog. |
7 | Tool weight information | Affichage des informations de poids de l'outil configurées à l'aide des fonctions de configuration du TCP et du poids de la commande du TCP définie ou du jog. |
8 | Collision information area | Affichage de la sensibilité de collision définie pour la zone dans laquelle le robot est actuellement positionné. |
9 | Force information area | Les informations de force sont affichées survenant au niveau des systèmes de coordonnées de base, monde, utilisateur ou de référence. Le système de coordonnées de référence affiche la force sur la base des informations de système de coordonnées de référence appliquées au robot. |
10 | Speed slider | Il définit la vitesse du robot en mode virtuel ou réel. |
11 | Stop button | Il arrête la tâche en cours. |
12 | Execute/pause toggle button | Il exécute ou met en pause le travail de la liste de tâches. |
13 | Time | Il affiche la durée écoulée lors de l'exécution de la commande/compétence correspondante. |

Mise en garde
- Avant d'exécuter une tâche, exécutez-la en mode virtuel pour vérifier que la tâche fonctionne bien comme prévu.
- Il est recommandé de tester le programme du robot en désignant les points de repère temporaires en dehors de l'espace de travail d'une autre machine. Doosan Robotics n'est pas responsable des dommages survenant en lien avec une erreur de programmation ou un dysfonctionnement du robot, ni de tout endommagement de l'équipement.
- Le bouton d'arrêt d'urgence est situé sur le boîtier d'apprentissage. En situation d'urgence, appuyez sur le bouton d'arrêt d'urgence pour arrêter le robot.
Dans le cas des modèles sans capteur de couple de force, les valeurs de force (X, Y, Z) ne sont pas surveillées.