
Configuration du déplacement selon l'angle
Pour déplacer le robot selon un angle spécifique, procédez comme suit :
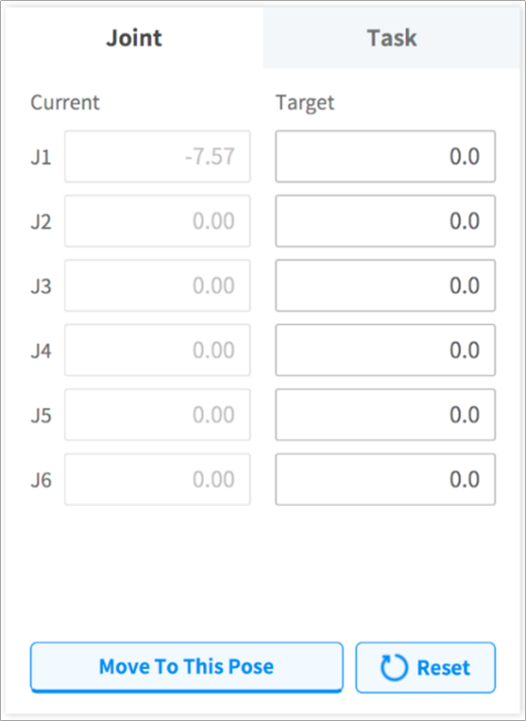
- Sélectionnez l'onglet Move (Déplacer) et sélectionnez l'onglet Joint (Articulation).
- Entrez l'angle cible de l'articulation du robot.
- Activez Real Mode (Mode réel).

- Maintenez enfoncé le bouton Move to Corresponding Pose (Déplacer vers la pose correspondante) pour ajuster l'angle de l'articulation du robot.