
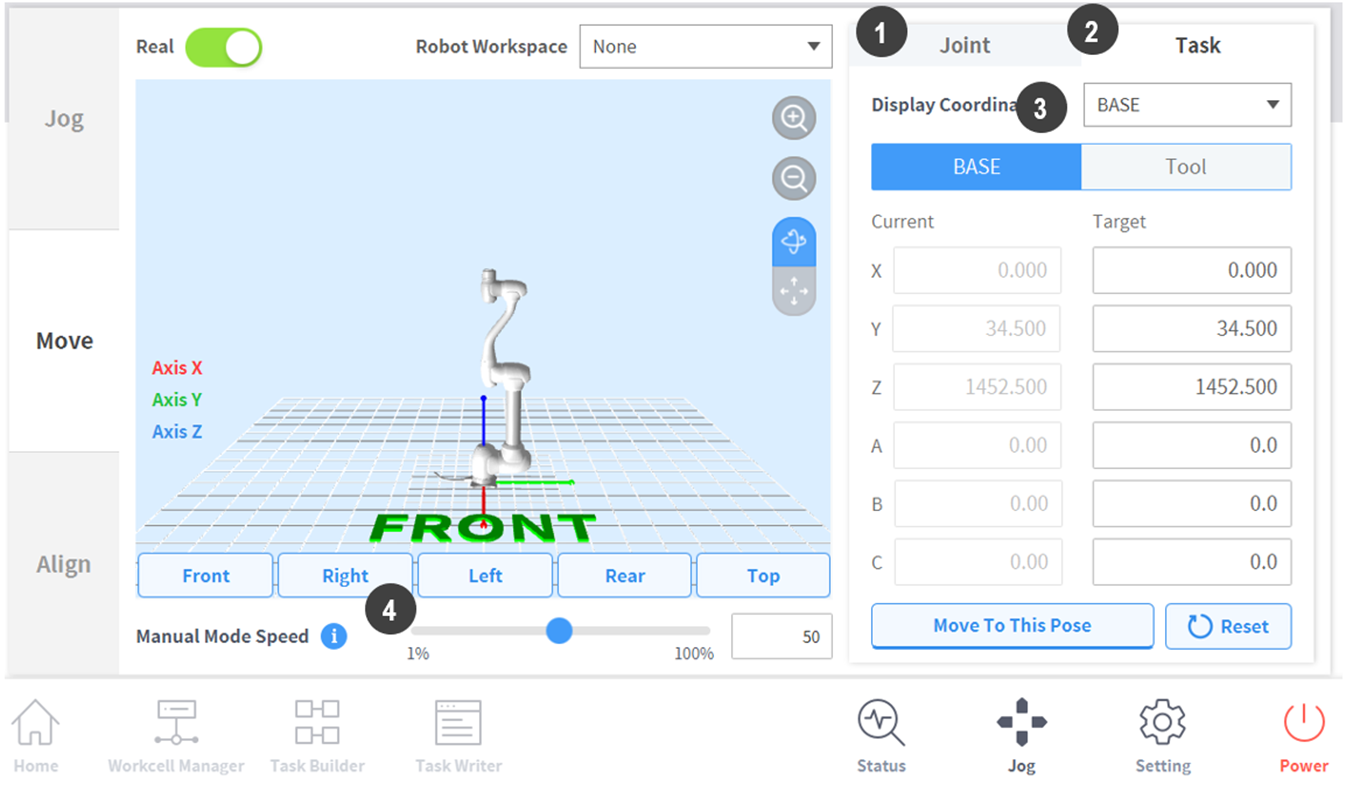
Écran Movement (Mouvement)
Le robot peut être déplacé en fonction de l'angle / des coordonnées de la cible dans l'écran Move (Déplacer). Si les coordonnées que le robot doit atteindre sont connues, ou si le robot doit passer à des coordonnées en décimales, il est possible de déplacer le robot en saisissant les coordonnées.
N° | Élément | Description |
|---|---|---|
1 | Joint | Configuration des coordonnées de référence à utiliser lors du déplacement du robot grâce à un jog. |
2 | Task | Configuration de l'angle de référence à utiliser lors du déplacement du robot grâce à un jog. |
3 | Reference Point Setting | Configuration du point de référence pour l'alignement des coordonnées de la tâche. Base : définition des coordonnées de la tâche en fonction de la base du robot. World (Monde) : règle les coordonnées Monde selon les coordonnées Monde définies. Tool (Outil) : configuration des coordonnées de la tâche en fonction de l'outil installé à l'extrémité des six axes du robot. |
4 | Manual Mode Speed | Configuration de la vitesse de mouvement du robot en mode manuel. La vitesse peut être ajustée par glissement du curseur de la barre. Si le curseur de la barre est placé sur 100 %, la vitesse d'articulation maximale sur l'onglet Move (Déplacer) est de 30 deg/s et la vitesse de tâche maximale est de 250 mm/s. La vitesse influence la rapidité d'exécution du jog et du bouton. |