
Alignment based on Target (Alignement basé sur la cible)
Il s'agit d'une fonction utile si la pièce est alignée sur le TCP dans une direction d'axe pour l'apprentissage de la pièce. Pour effectuer un apprentissage après avoir verrouillé la pose, utilisez la fonction d'apprentissage direct verrouillé en plan ou en ligne à l'aide des boutons du cockpit.
Pour aligner le TCP du robot en fonction de la cible, procédez comme suit :
- Sélectionnez l'onglet Align (Aligner) et sélectionnez l'onglet Parallel To Target (Parallèle à la cible).
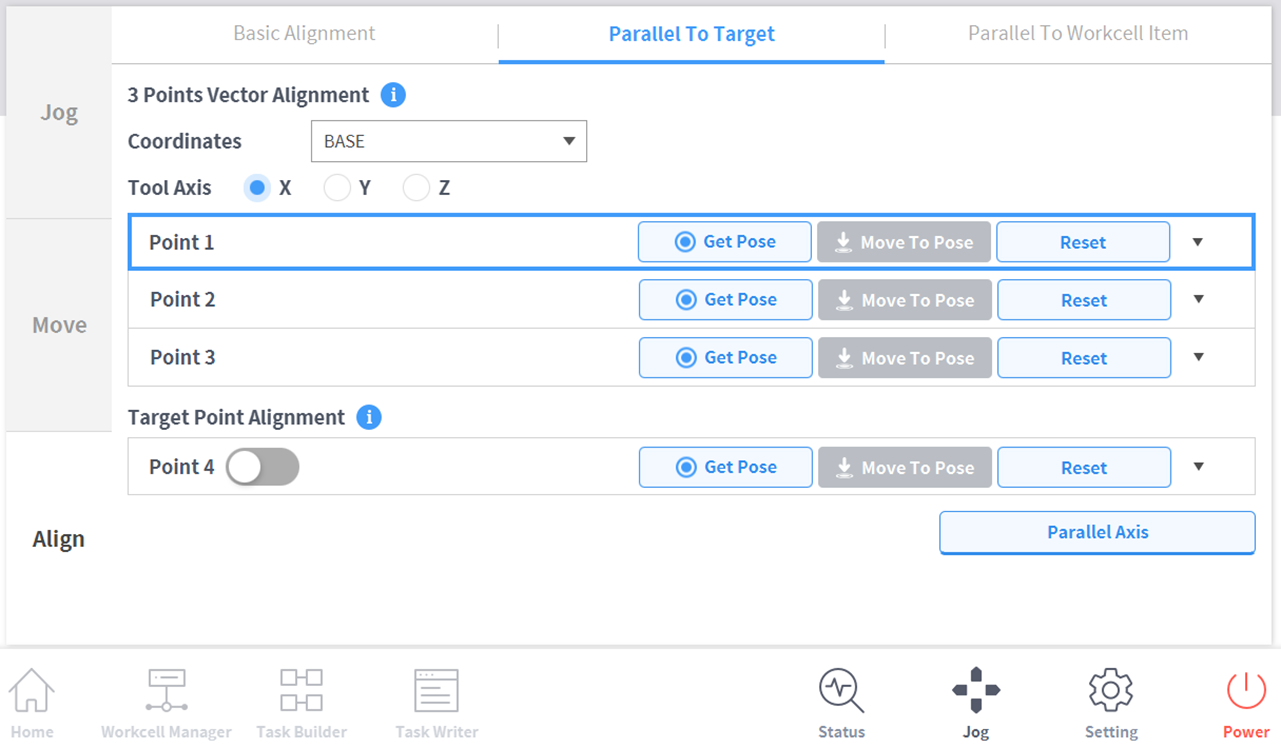
- Sélectionnez les coordonnées de référence pour l'alignement.

- Sélectionnez l'axe de l'outil à aligner.

- Déplacez le robot dans la position souhaitée, puis appuyez sur Point 1.
- Appuyez sur le bouton Save Pose (Enregistrer la position) du Point 1.
- Les Point 2 et Point 3 sont définis de la même manière. Une fois la configuration terminée, une zone vectorielle virtuelle est définie à partir de ces trois points.

- Les Point 2 et Point 3 sont définis de la même manière. Une fois la configuration terminée, une zone vectorielle virtuelle est définie à partir de ces trois points.
- (Facultatif) Pour définir la position et la direction du TCP en même temps, appuyez sur le bouton à bascule du Point 4, déplacez le robot dans la position souhaitée et appuyez sur le bouton « Save Pose » (Enregistrer la position).
- Appuyez sur le bouton Align Axis (Aligner axe) et maintenez-le enfoncé pour aligner l'axe.
- Placez la tête à 6 axes 150 mm au-dessus de la cible EN direction de l'axe Z.