
Configuration de World Coordinates (Coordonnées Monde)
Permet de configurer un système de coordonnées qui représentent le robot et la pièce. Ce système de coordonnées est appelé World Coordinates (Coordonnées Monde) et est très différent des Base Coordinates (Coordonnées Base) qui sont fixées à la base. Il est possible de configurer la pose des coordonnées Base à l'aide des coordonnées Monde, et les coordonnées Monde peuvent être sélectionnées au cours de l'apprentissage et du mouvement en utilisant le robot dans le Task Builder (Générateur de tâches) et le Task Writer (Rédacteur de tâches). Pour configurer les coordonnées Monde, appuyez sur le bouton 
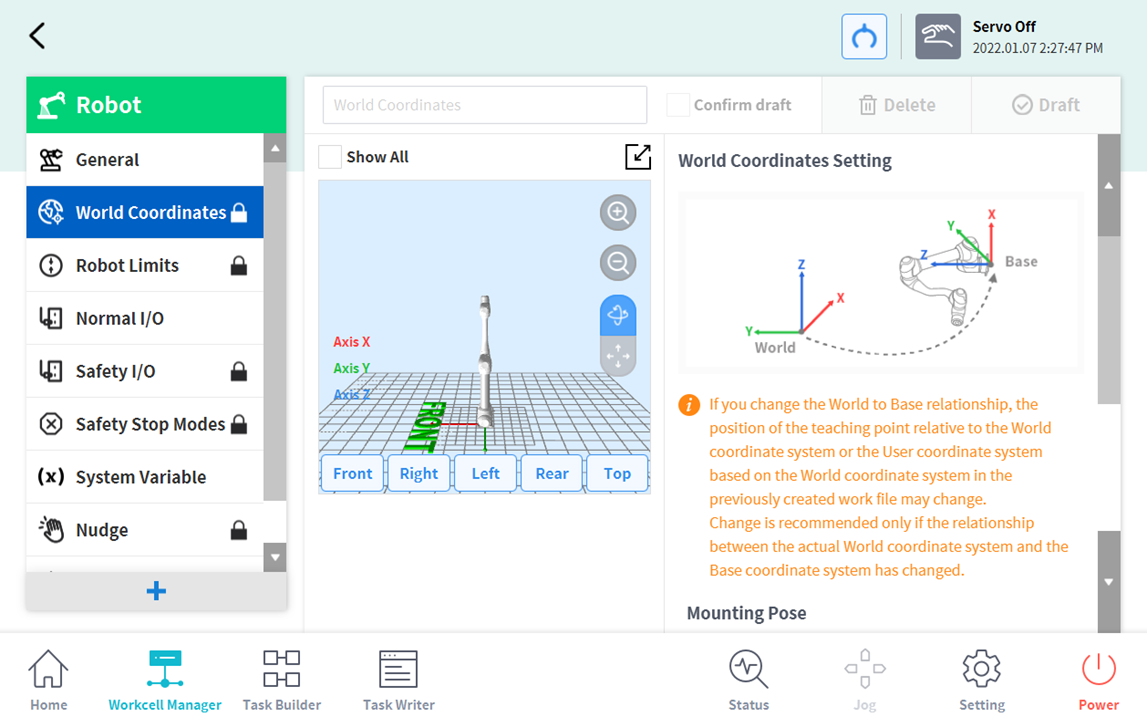
- Appuyez sur le bouton Edit (Modifier) en haut de l'écran.
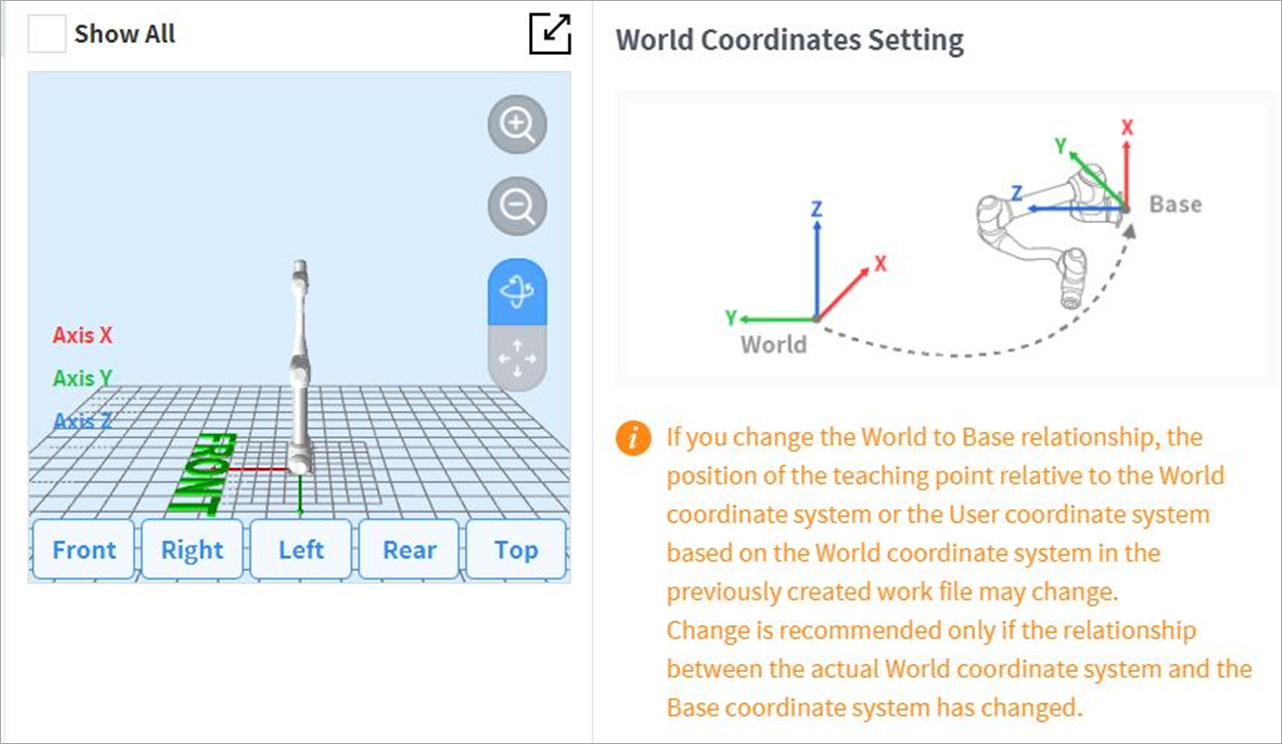
Veuillez vous référer à la figure décrivant la relation entre les coordonnées Monde et les coordonnées Base, ainsi que les précautions qui y sont liées.
Avertissement
Lorsque la relation entre les coordonnées Monde et Base est modifiée, le point d'apprentissage des coordonnées Monde ou des coordonnées de l'utilisateur, basé sur les coordonnées Monde, peut changer. Des modifications sont recommandées uniquement lorsque la relation actuelle entre les coordonnées Monde et les coordonnées Base sont modifiées.
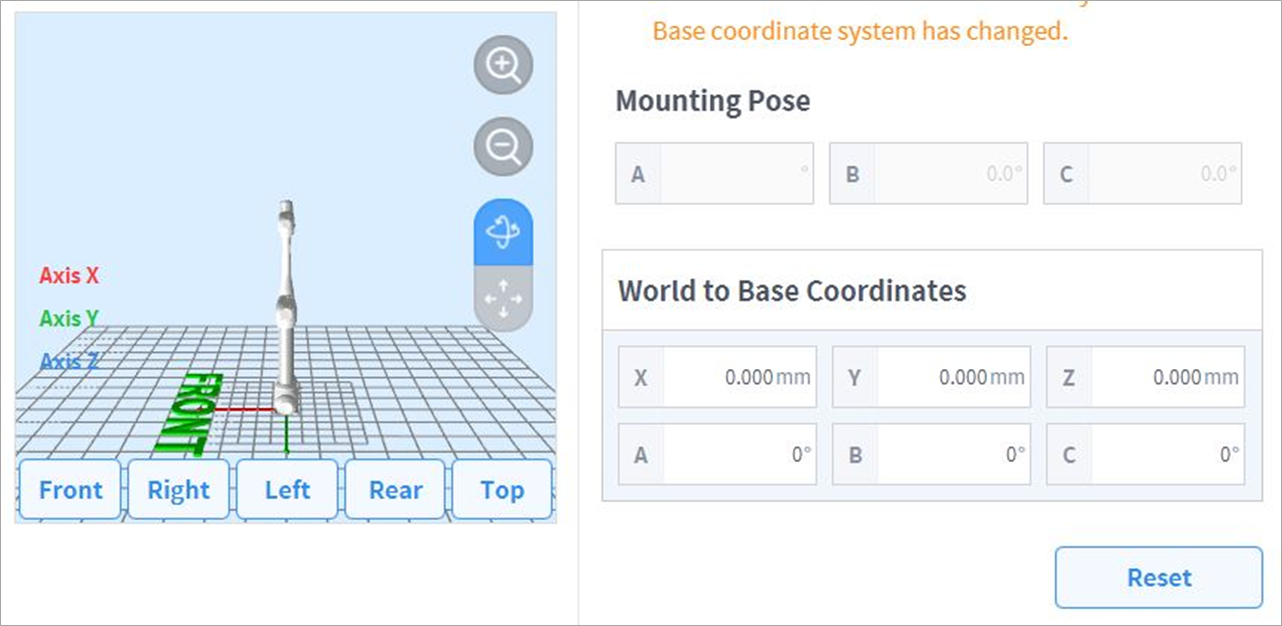
- La pose de montage (inclinaison de l'installation) est affichée au centre à droite. Généralement, les coordonnées Monde décrivent l'environnement de travail du point de vue de l'utilisateur. Ainsi, l'axe z des coordonnées Monde est dirigé vers le plafond. Puisque l'un des axes des coordonnées Base est fixé au plan inférieur du robot, la relation entre les coordonnées Monde et les coordonnées Base changent en fonction du lieu/de la pose d'installation du robot. La figure ci-dessus part du principe que le robot est installé contre un mur. Dans ce cas, l'axe Z des coordonnées Base est perpendiculaire au mur, qui est parallèle à l'axe Y des coordonnées Monde, et l'inclinaison et la rotation de la pose de montage sont affichées à 90 et 0 degrés, respectivement. La relation entre les coordonnées Monde et Base est définie comme étant la relation des coordonnées Base selon les coordonnées Monde. S'il existe une disposition prédéfinie de l'environnement de travail, configurez les coordonnées en conséquence. Les valeurs X/Y/Z indique un mouvement, et les valeurs A/B/C indiquent une rotation selon la convention Z-Y-Z d'Euler. Si la pose de montage est définie selon la pose d'installation du robot, il convient d'utiliser l'angle de rotation de B/C en tant que pose de montage B/C. Cependant, si la pose de montage est configurée à l'aide de la fonction de supposition automatique, la valeur supposée peut contenir une déviation. Il est donc recommandé d'utiliser l'angle de rotation défini selon la disposition.
- Appuyez sur le bouton Apply (Appliquer).
- Appuyez sur le bouton Confirm (Confirmer).
Remarque
Afin de pouvoir utiliser correctement les points d'apprentissage existants, les programmes utilisateur créés à l'aide du Task Builder (Générateur de tâches) et du Task Writer (Rédacteur de tâches) après avoir appliqué l'inclinaison de l'installation dans les versions logicielles antérieures à GF020400 doivent définir les coordonnées Monde avec l'inclinaison de l'installation appliquée lors de la mise à jour des versions logicielles ultérieures à GF020400 et convertir toutes les coordonnées Base en coordonnées Monde dans le programme utilisateur.
Si plusieurs robots travaillent dans un espace de travail commun ou si le robot est installé sur un dispositif mobile, tel qu'une base mobile ou une piste linéaire, la relation et la position du point d'apprentissage entre la pièce et la base du robot peut changer. Dans de tels environnements, les coordonnées Monde, simples à apprendre, utiliser et partager, peuvent être définies.
Lorsqu'un outil est installé ou remplacé, vous devez configurer son poids avant d'utiliser le robot. Pour plus d'informations à propos du réglage du poids de l'outil, consultez la section « Configuration de Tool Weight (Poids de l'outil) ».