Position initiale
Menu
|
Éléments |
Description |
|
|---|---|---|
|
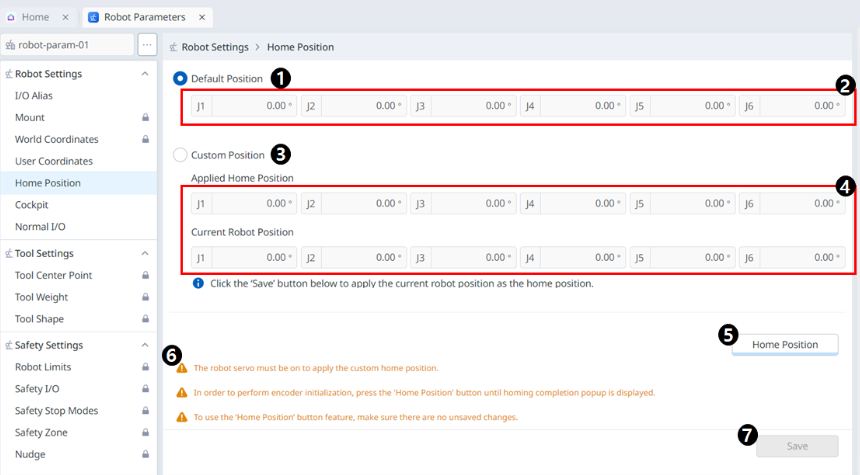
1 |
Option de position par défaut |
Il s'agit de la section dans laquelle vous pouvez sélectionner l'option position par défaut. |
|
2 |
Valeur de position par défaut |
Il s'agit des valeurs qui correspondent à la position par défaut, toutes égales à 0. |
|
3 |
Option de position personnalisée |
Cela vous permet de sélectionner l'option position personnalisée. |
|
4 |
Saisie de la valeur de position personnalisée |
C'est la section où vous pouvez entrer des valeurs pour les 6 axes, appliquer Get pose et les initialiser. |
|
5 |
Position initiale |
Ce bouton vous permet de définir la position par défaut ou la position personnalisée que vous définissez comme position initiale. |
|
6 |
Message d'avertissement |
Un message d'avertissement s'affichera lors de la configuration. |
|
7 |
Enregistrer |
La valeur de réglage peut être appliquée. |
Avertissement
Lorsqu'un robot ou une articulation d'un robot est en cours de permutation, la position initiale personnalisée doit être réinitialisée.