Attention
Avant d'essayer l'échantillon, assurez-vous de lire et de suivre les précautions. Pour plus d'informations, référez-vous à Configuration de PART 1 (Pousser). Manuel de sécurité
Remarque
Cet exemple nécessite le fichier du rédacteur de tâches créé dans les exemples de commande Try Compliance
-
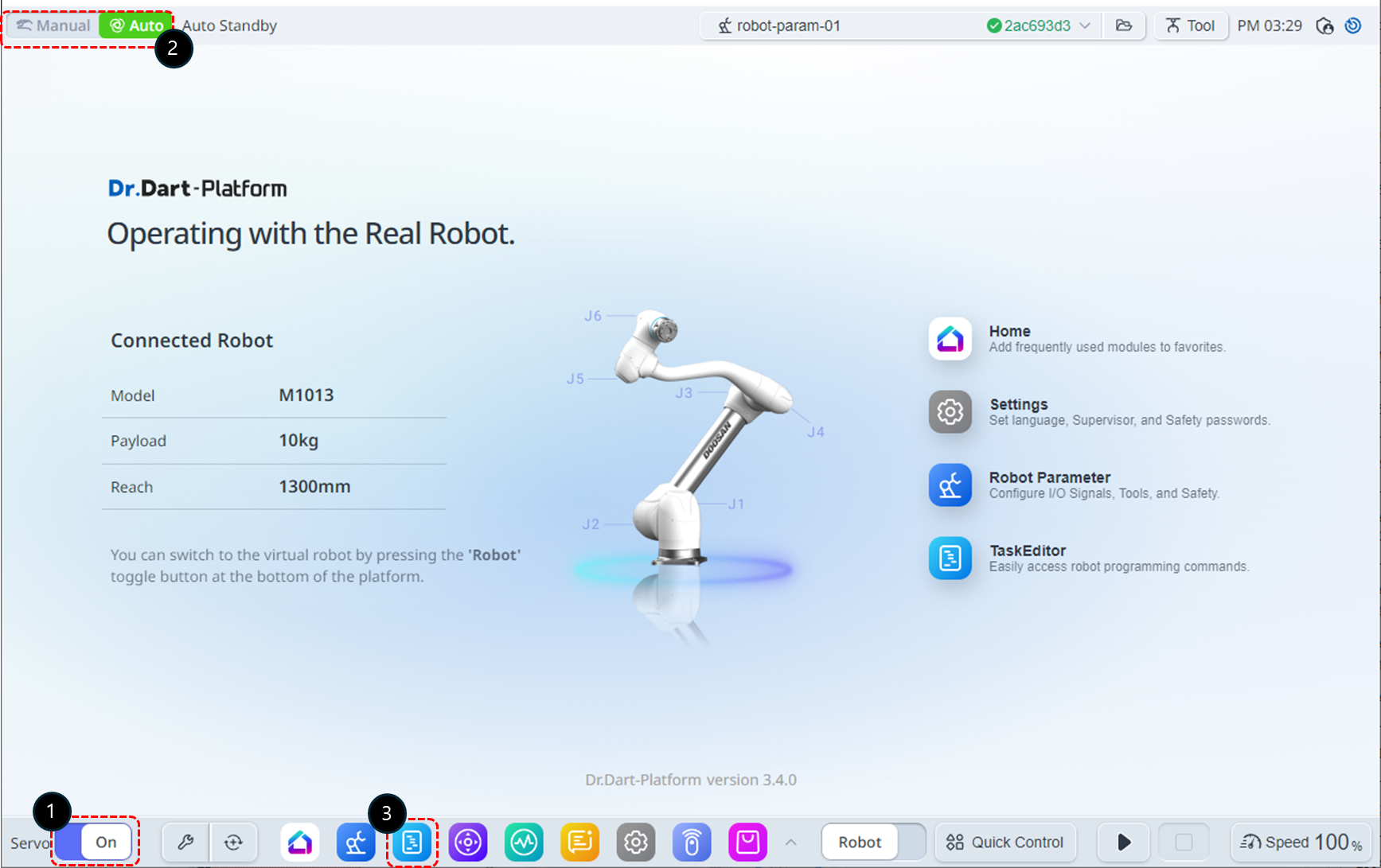
Réglez l'état du servomoteur sur on.
-
Réglez le mode de fonctionnement sur Manuel.
-
Sélectionnez le module Editeur de tâches dans le menu inférieur.
-
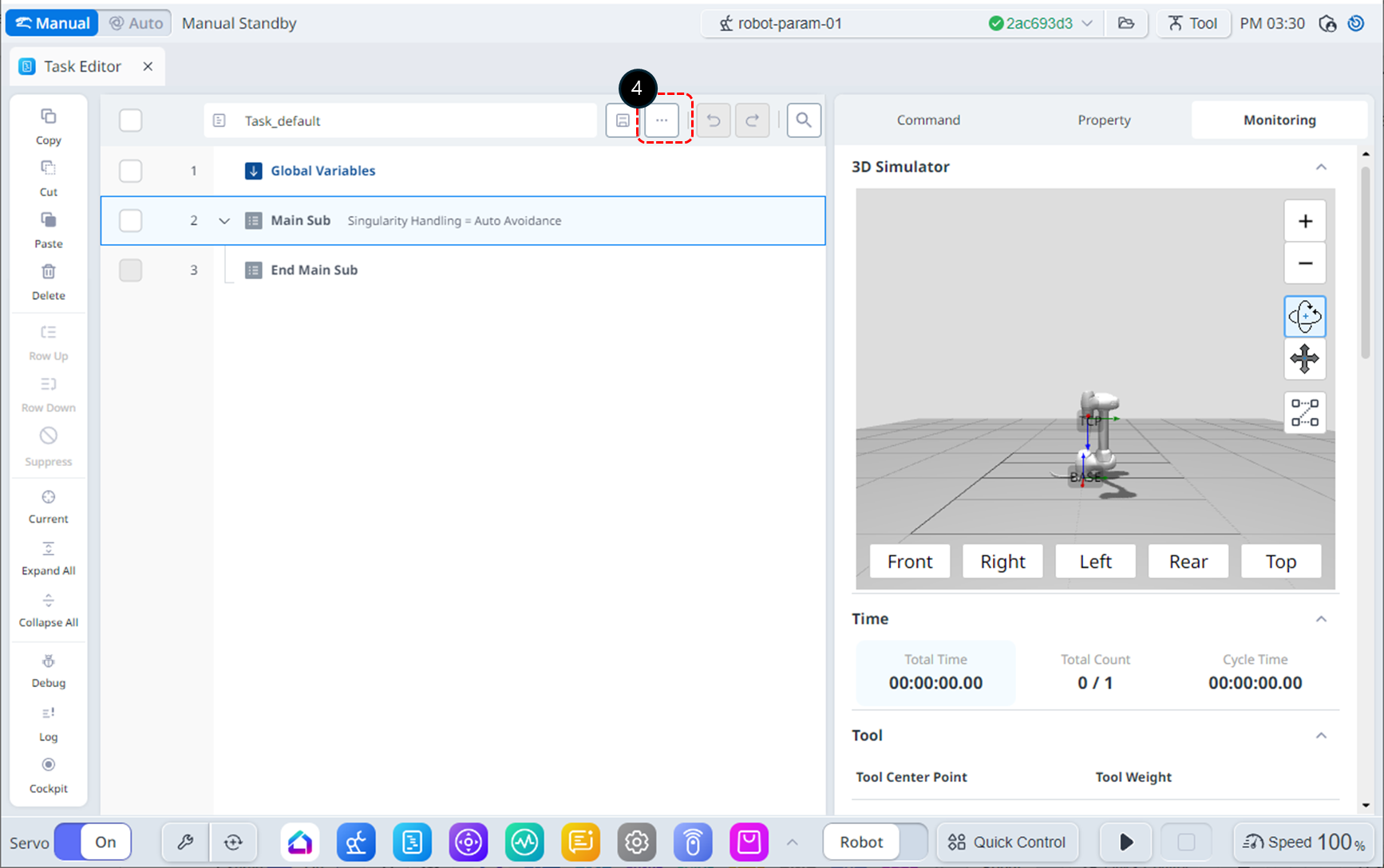
Cliquez sur le bouton fichier.
-
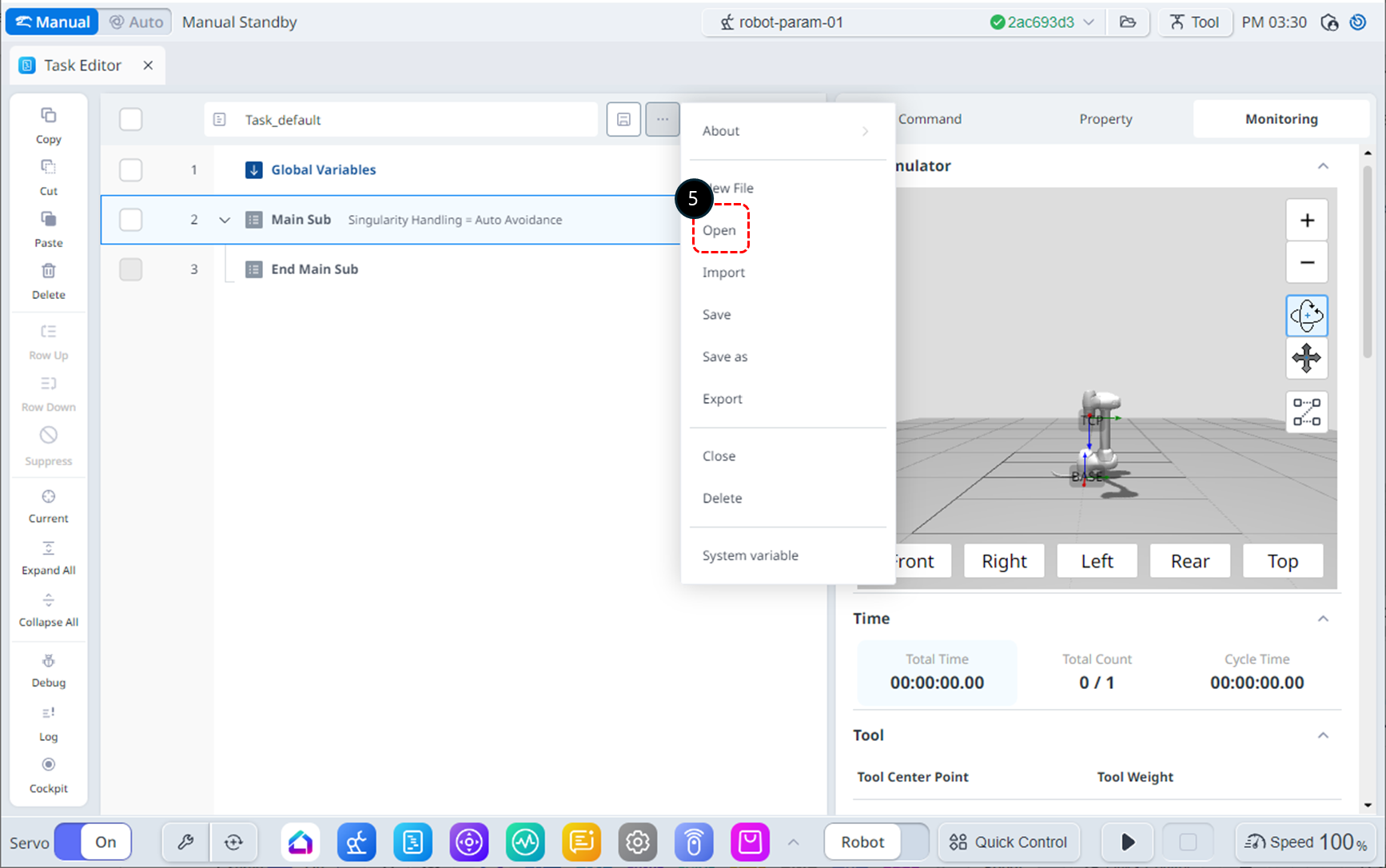
Cliquez sur le bouton ouvrir.
-
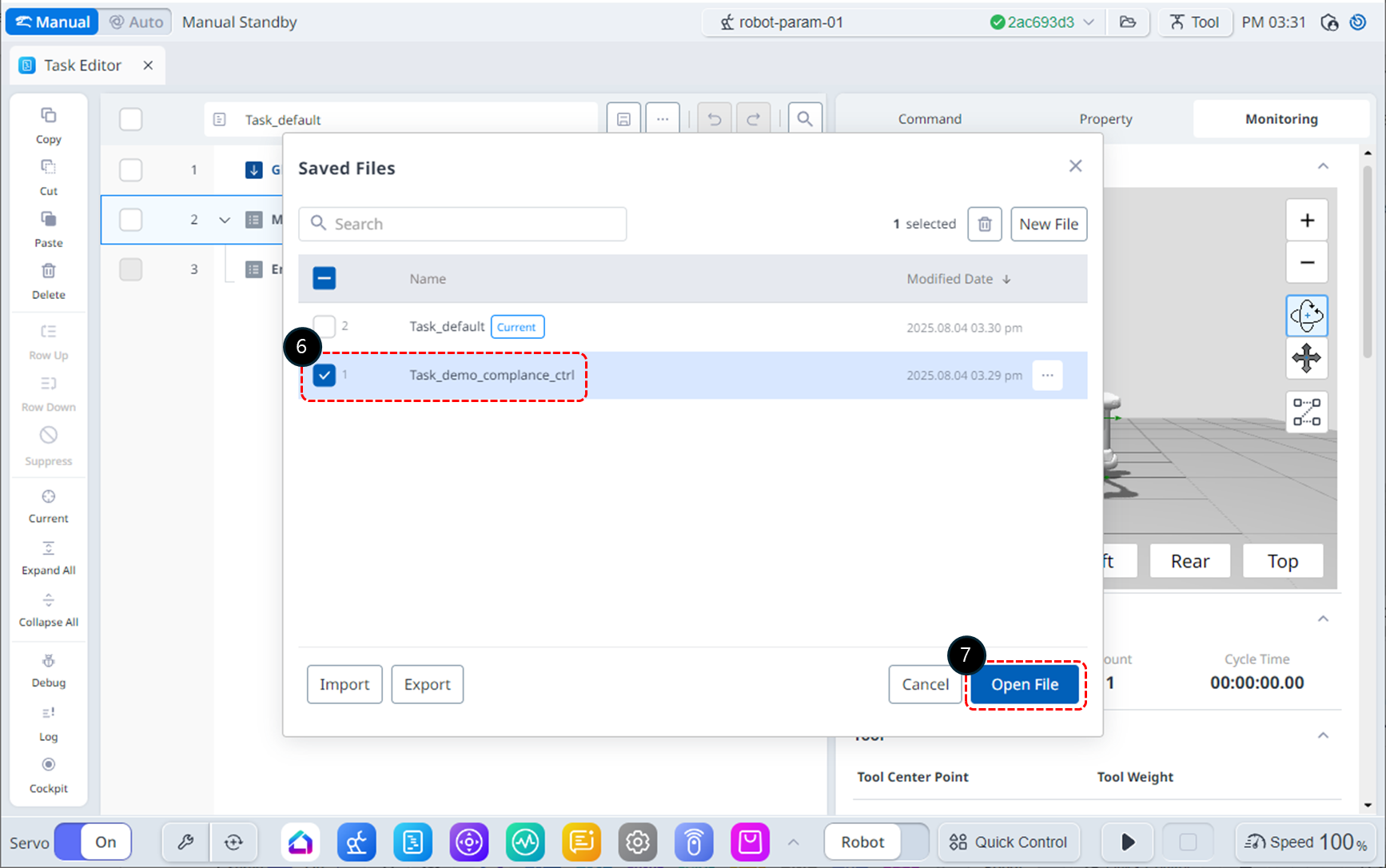
Sélectionnez le fichier Task_DEMO_Compliance_ctrl créé dans les exemples de commande Try Compliance.
-
Cliquez sur le bouton ouvrir fichier.
-
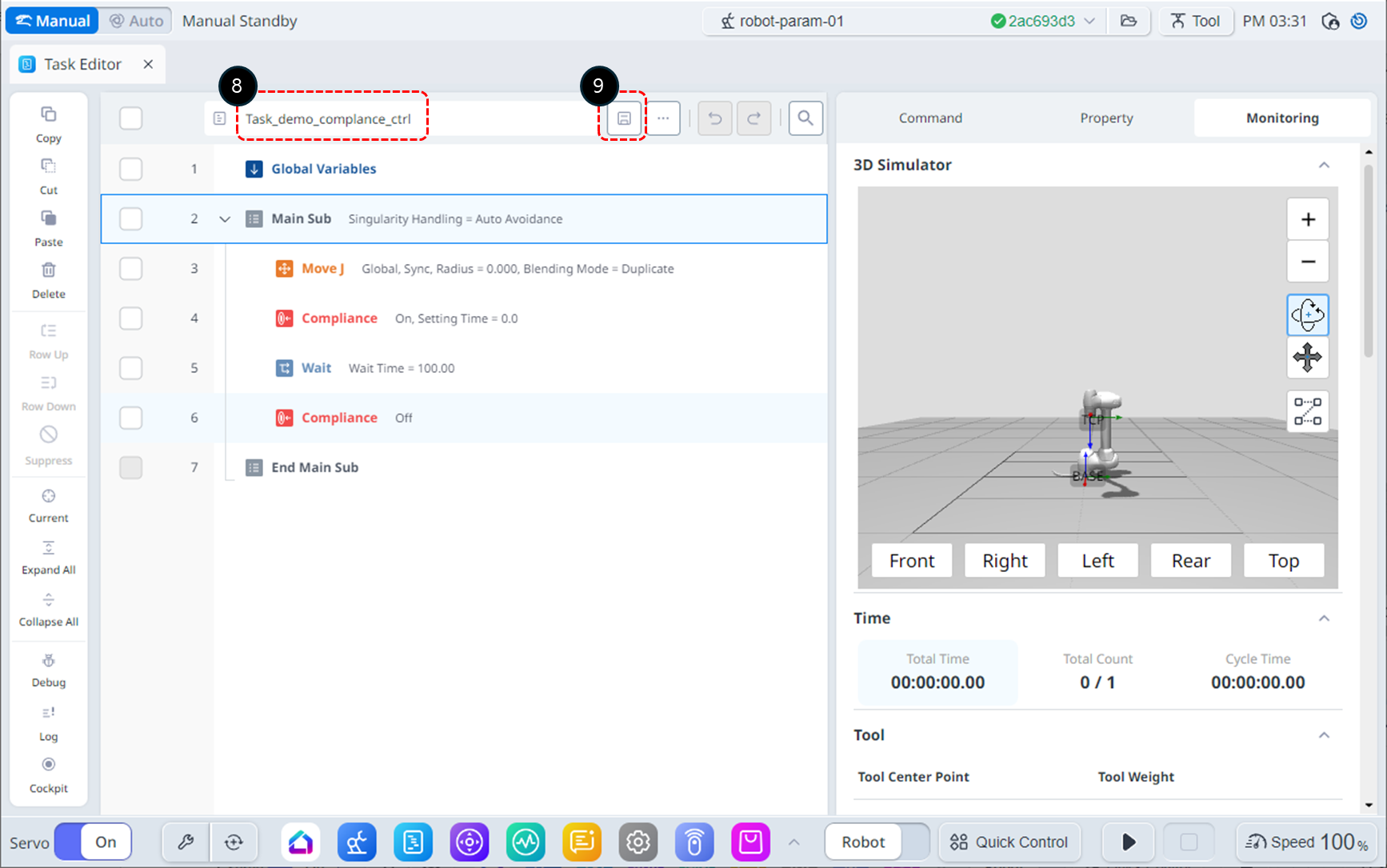
Renommez le fichier Task_DEMO_force_ctrl.
-
Cliquez sur le bouton Enregistrer pour enregistrer le nom du fichier.
-
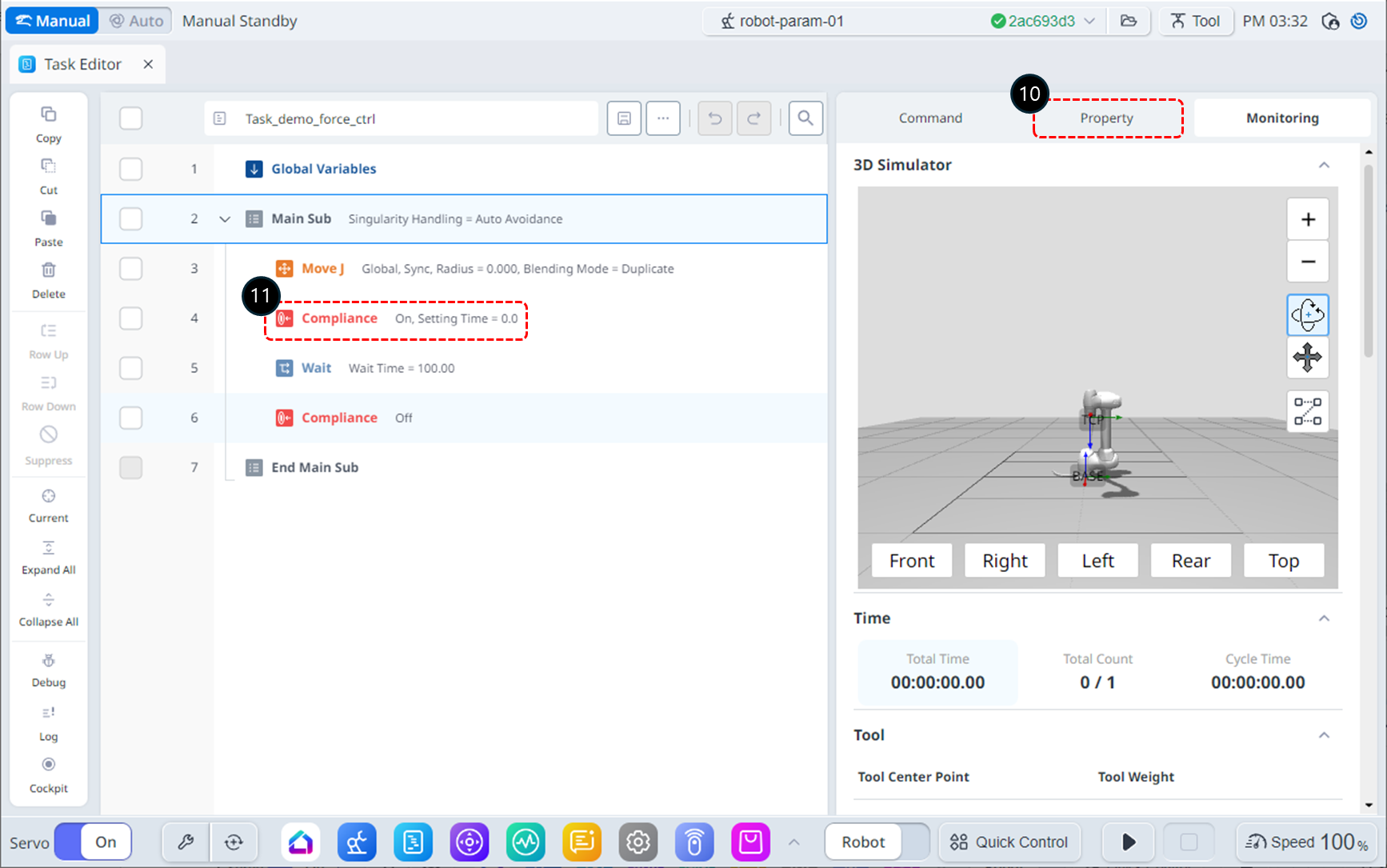
Choisissez l'onglet propriété.
-
Choisissez la commande Compliance sur la 4ème ligne.
-
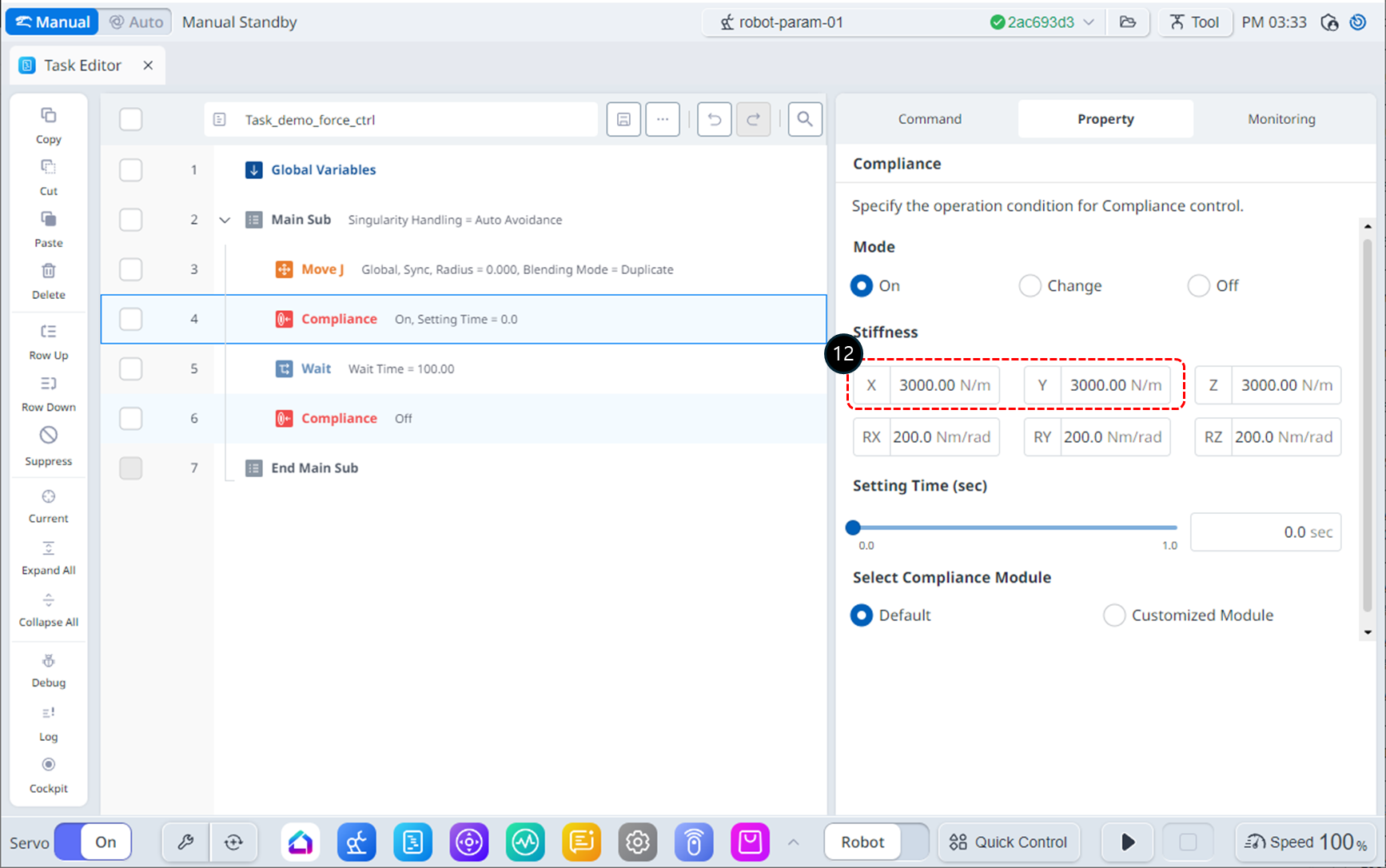
Définissez la raideur sur ses valeurs par défaut comme suit.
-
X, Y, Z: 3000 N/m (par défaut)
-
Rx, Ry, Rz : 200 Nm/rad (par défaut)
-
-
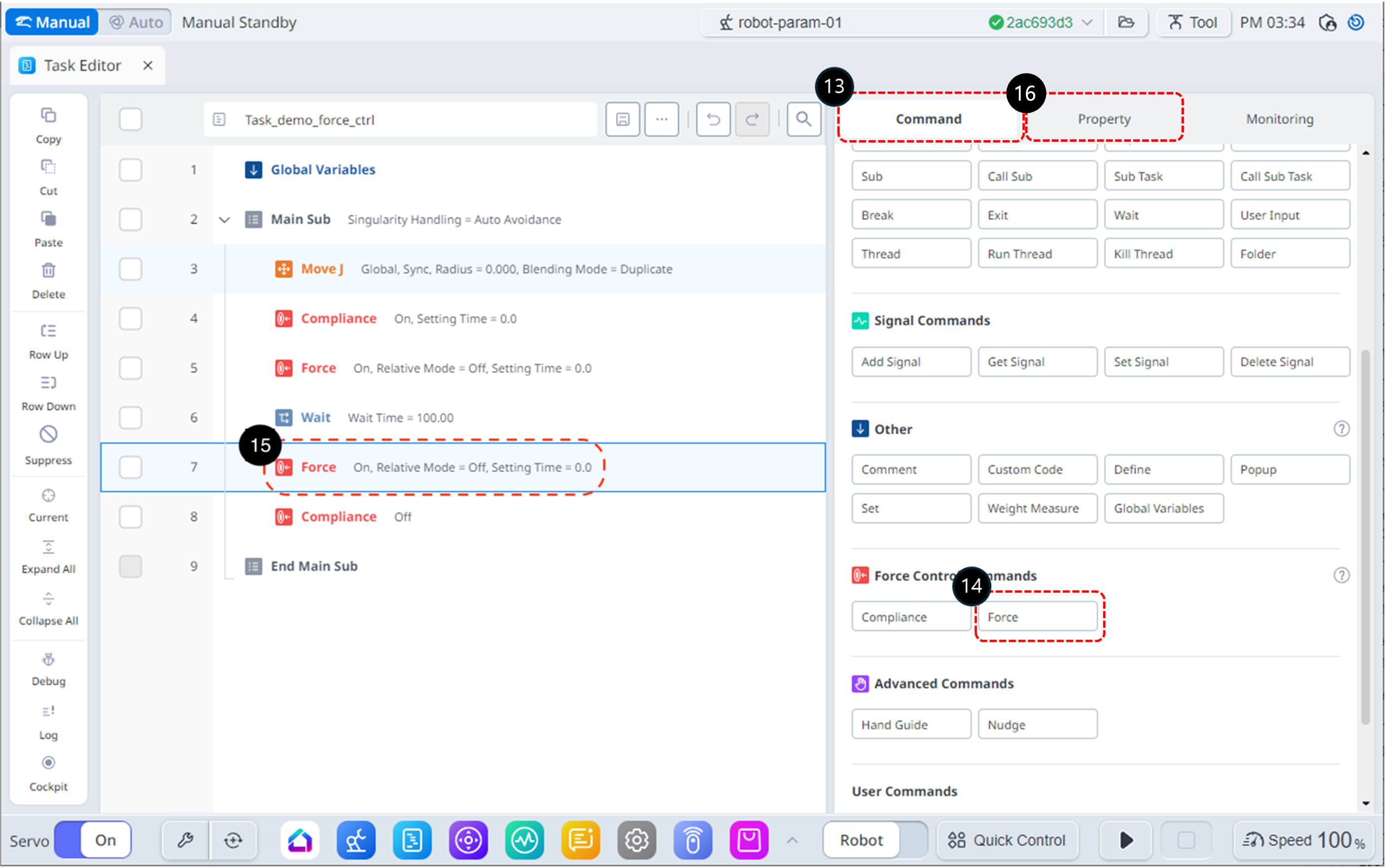
Choisissez l'onglet Commande
-
Ajoutez une commande Force aux 5ème et 7ème lignes. Ces commandes seront utilisées pour activer et désactiver le contrôle de force.
-
Sélectionnez la commande forcer sur la 5ème ligne.
-
Accédez à l'onglet propriété.
-
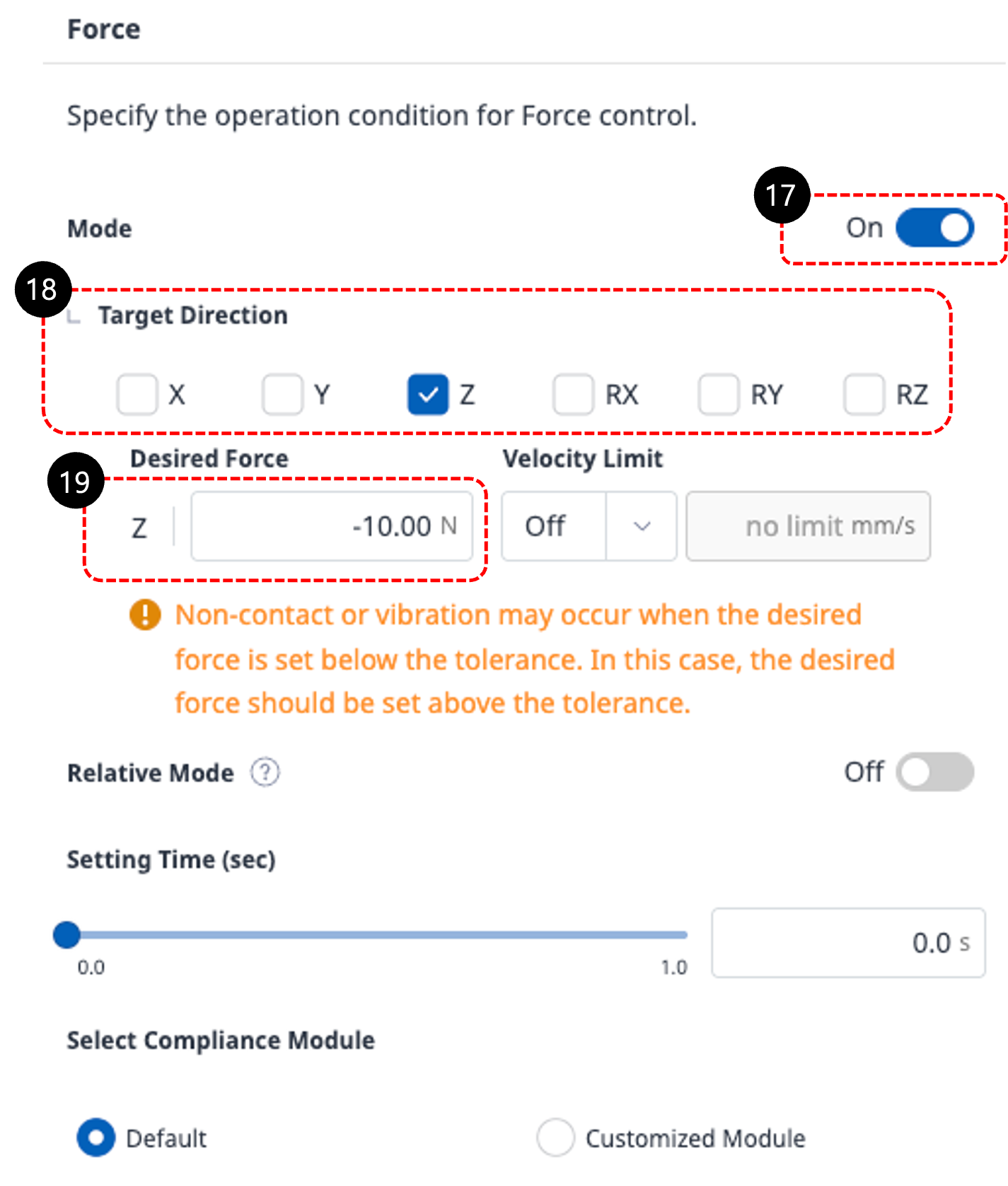
Définissez le mode comme suit : Le mode activé active le contrôle de force.
-
Mode Activé
-
-
Dans la direction cible, vérifiez uniquement l'axe z.
-
Dans Force souhaitée, réglez Z sur -10 N.
-
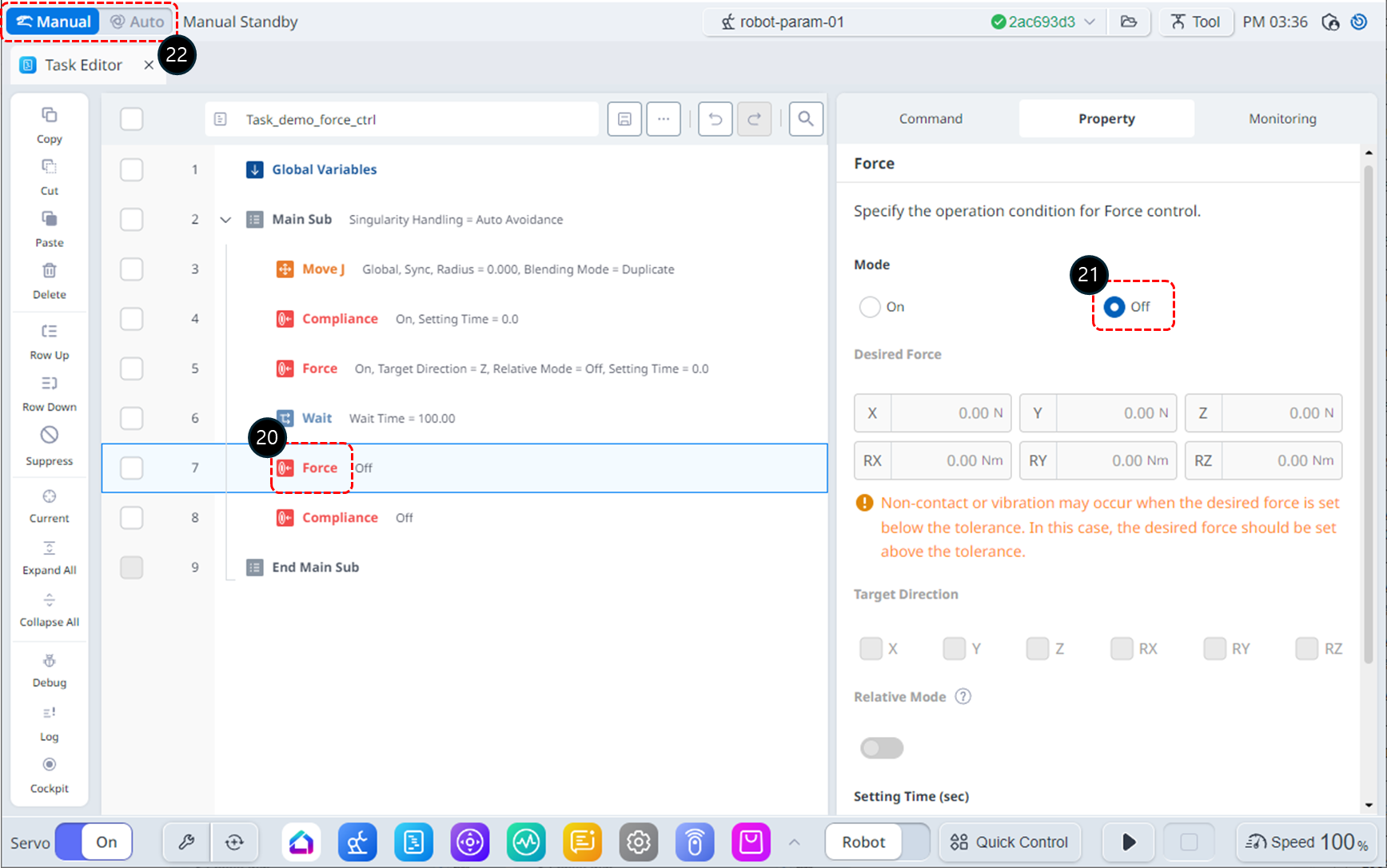
Dans la liste des tâches, sélectionnez la commande forcer à la ligne 7.
-
Définissez le mode comme suit : Le mode arrêt désactive le contrôle de force.
-
Mode Off:
-
-
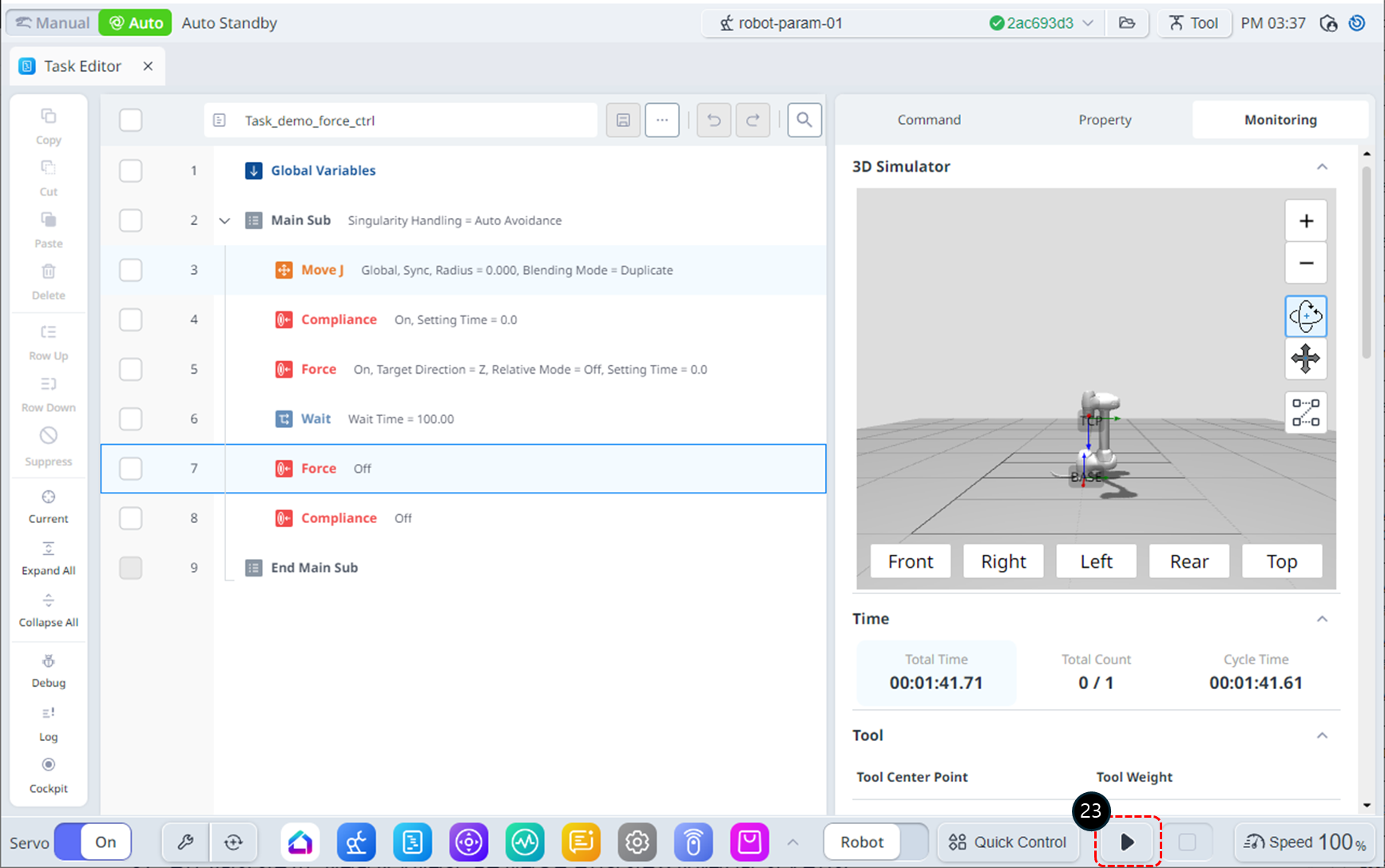
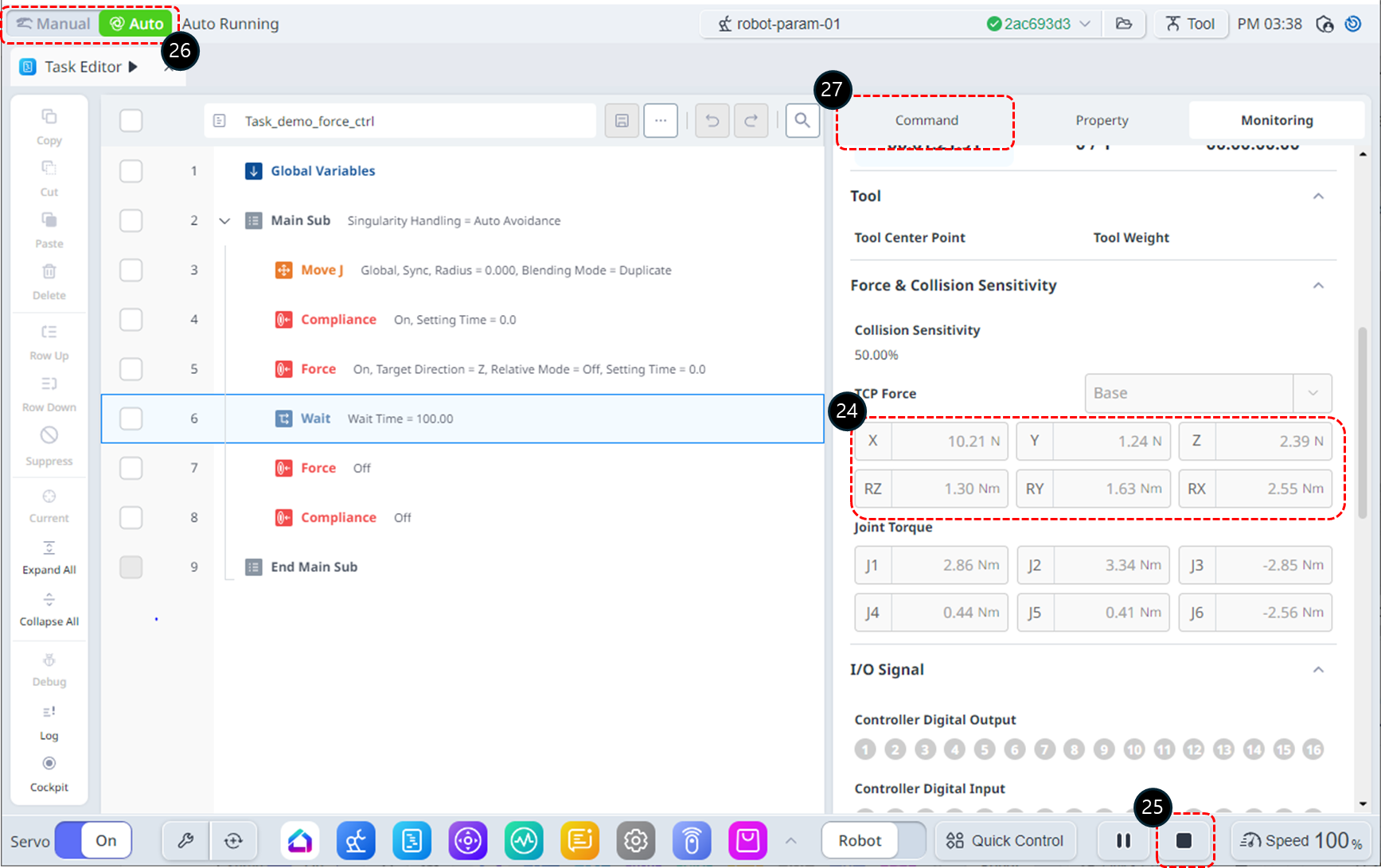
Réglez le mode de fonctionnement sur Auto. L'onglet propriété passe automatiquement à l'onglet surveillance.
-
Cliquez sur le bouton exécuter. Dans l'état attente, le robot fonctionne comme suit :
-
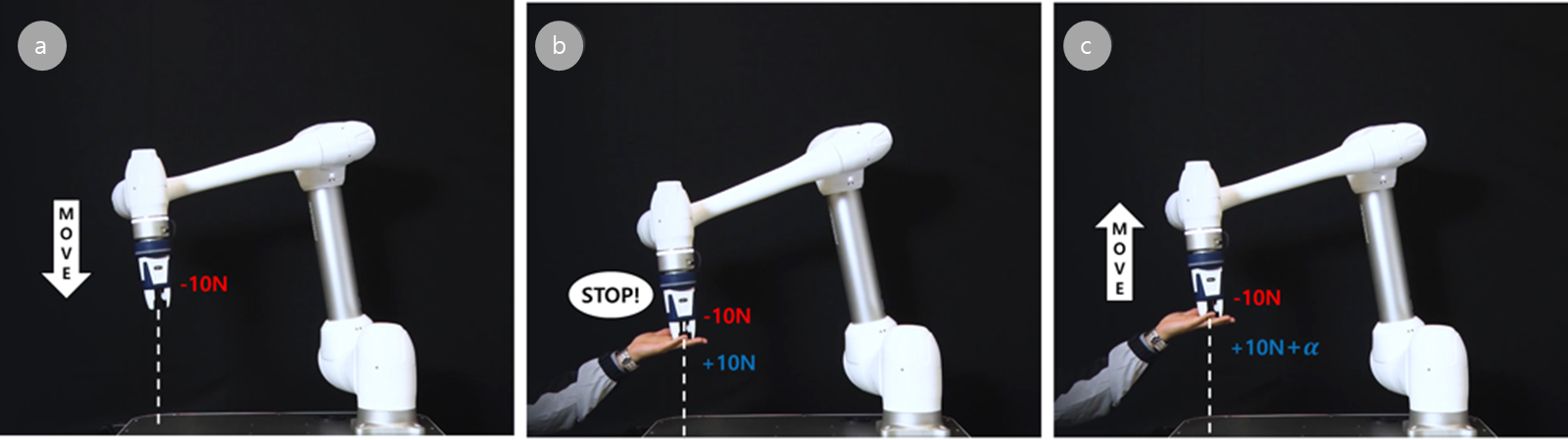
Une force de -10N est appliquée à l'effecteur terminal du robot, ce qui provoque un déplacement lent du robot dans la direction -Z.
-
Appliquez une force antagoniste dans la direction +Z, opposée au mouvement du robot. Lorsque la force appliquée par le robot et la force opposée sont équilibrées, le robot semble maintenir sa position comme s'il était immobile.
-
Si une force supérieure à +10N est appliquée au robot, il se déplacera dans la direction de la force appliquée.
-
-
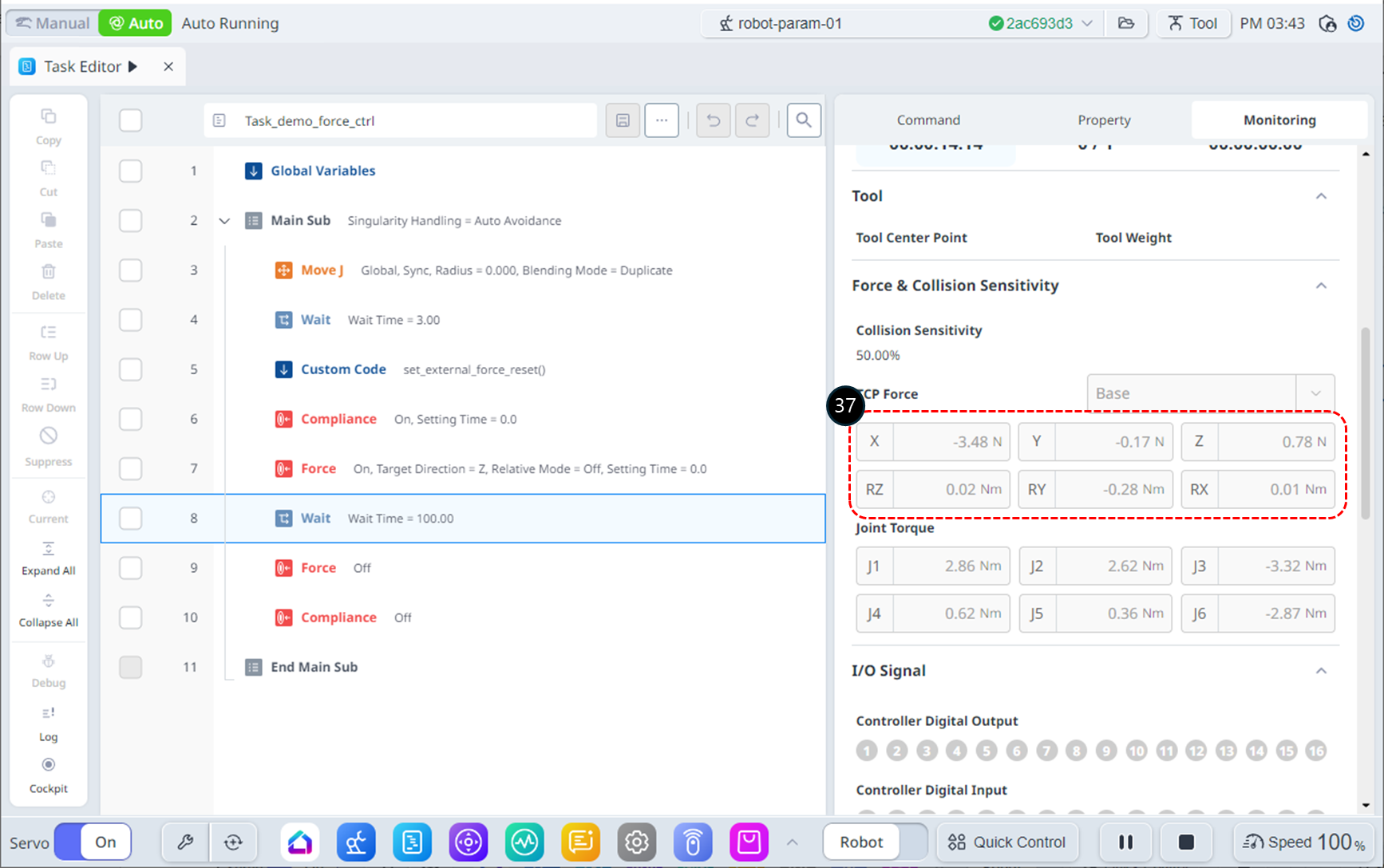
Pendant le fonctionnement, vous pouvez surveiller la force TCP en temps réel dans la section Force TCP de l'onglet surveillance. Si aucune force n'est appliquée à l'effecteur final du robot, les valeurs de force TCP doivent toutes être 0, mais vous pouvez remarquer que des composants d'erreur s'affichent. Vous trouverez ci-dessous une explication supplémentaire pour résoudre ce problème.
-
Cliquez sur le bouton arrêter pour mettre fin à la tâche.
-
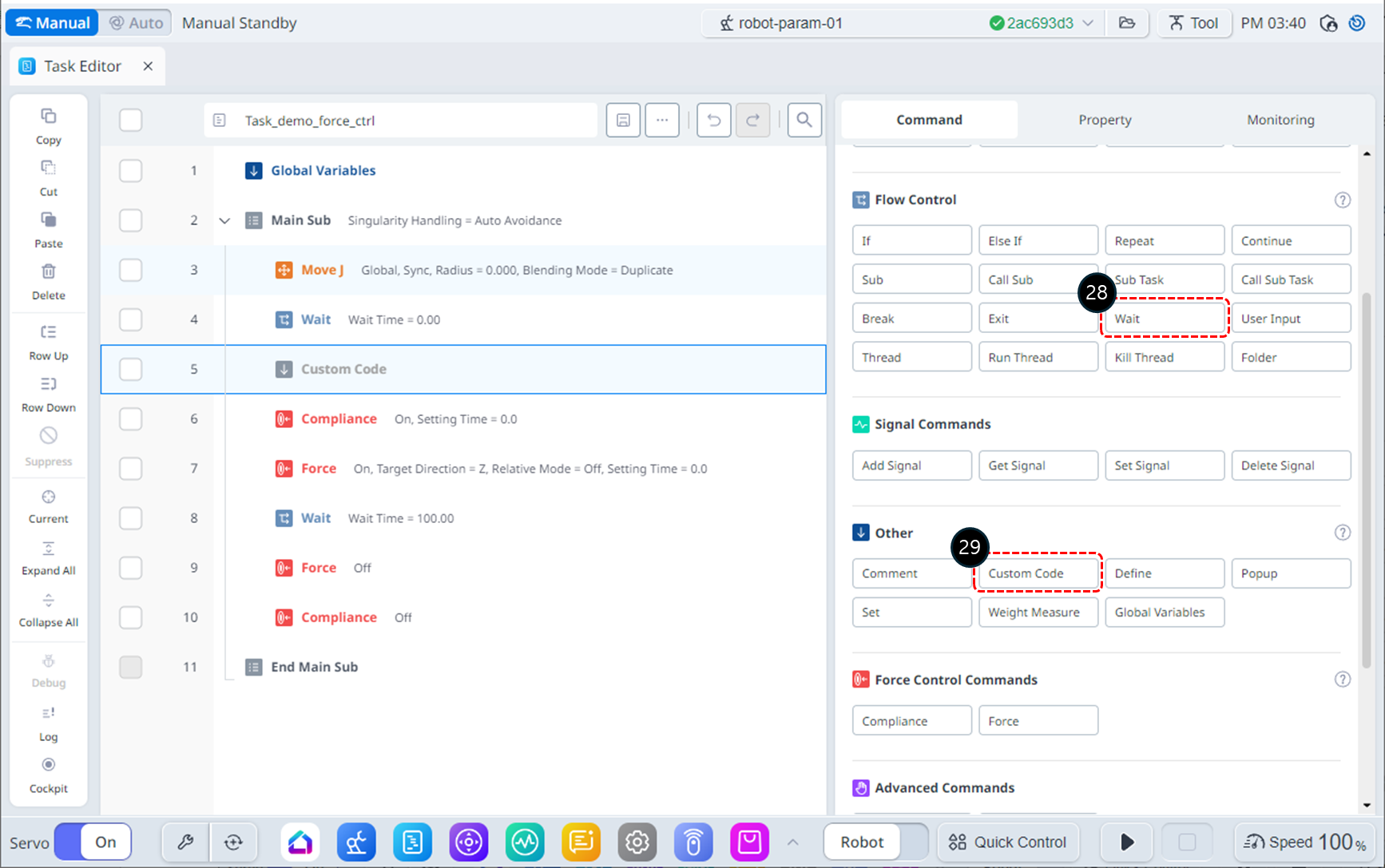
Basculer le mode de fonctionnement sur Manuel pour la modification des tâches.
-
Choisissez l'onglet Commande
-
Ajoutez une commande attendre à la ligne 4 de la liste des tâches.
-
Ajoutez une commande Code personnalisé à la ligne 5 de la liste des tâches.
-
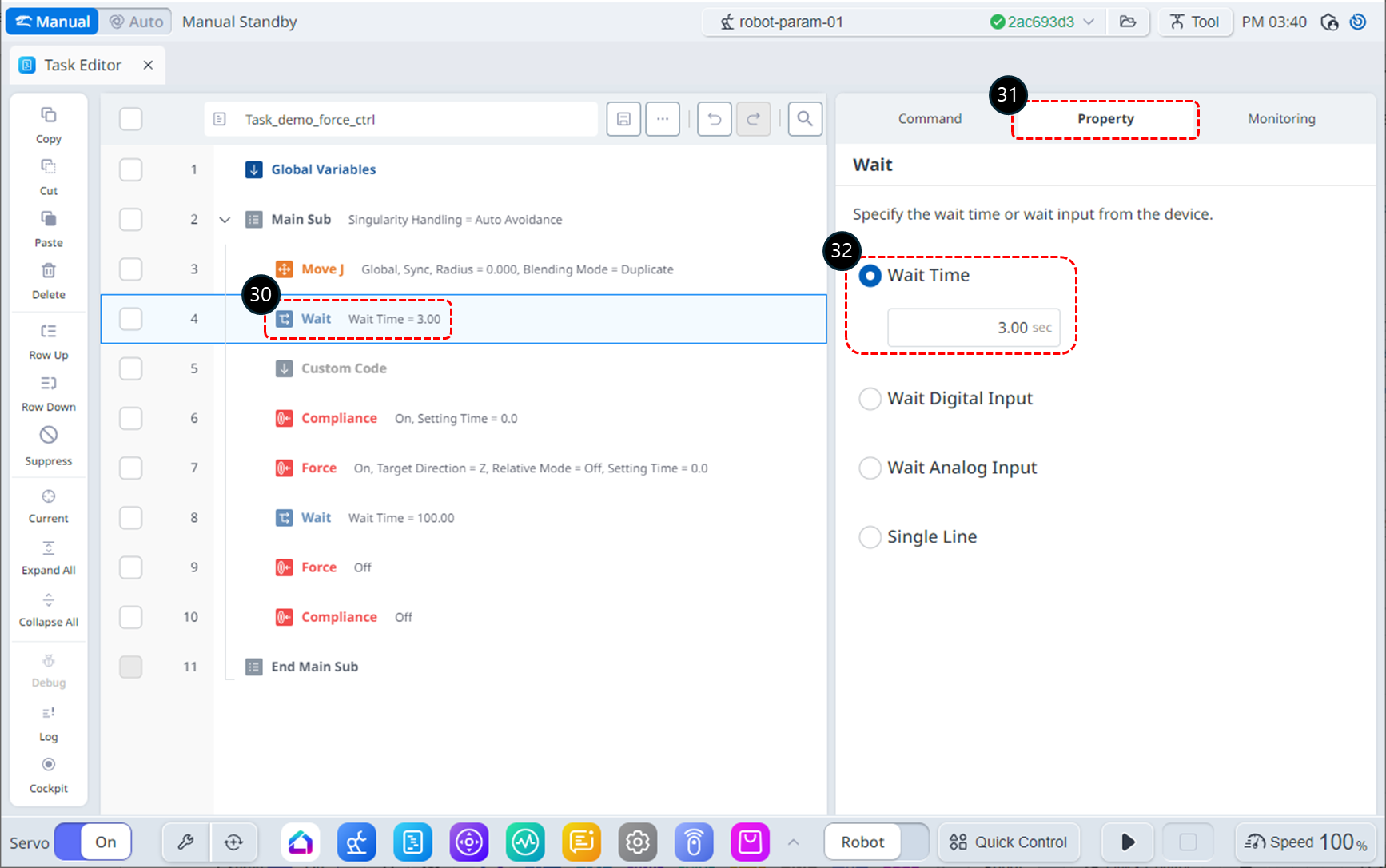
Sélectionnez la commande attendre à la ligne 4.
-
Choisissez l'onglet propriété.
-
Réglez le temps d'attente comme suit.
-
Temps d'attente : 3 s
-
-
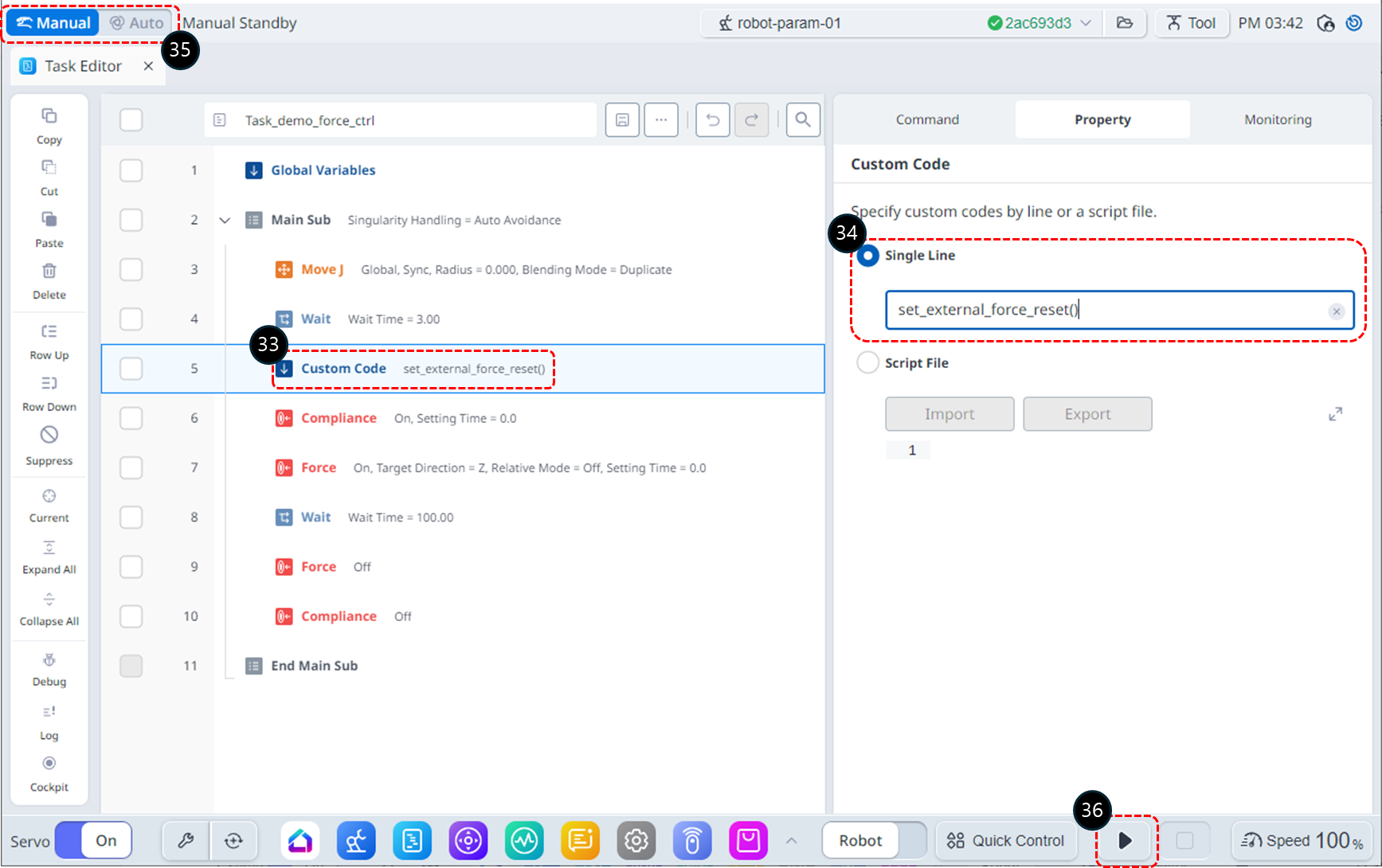
Sélectionnez la commande Code personnalisé à la ligne 5.
-
Choisissez ligne unique et ajoutez la commande DRL suivante : Cette commande réinitialise les valeurs du capteur de force externe pour supprimer les erreurs.
-
set_externl_force_reset()
-
-
Réglez le mode de fonctionnement sur Auto. L'onglet propriété passe automatiquement à l'onglet surveillance.
-
Cliquez sur le bouton exécuter.
-
Dans l'onglet surveillance, vérifiez les valeurs TCP Force. Vous remarquerez que l'erreur a été réduite par rapport à avant d'utiliser la commande set_external_force_reset().