
Module de Recovery
Module de Recovery : S'il y a une erreur avec une violation de sécurité continue ou si un robot doit être emballé pour le transport, l'utilisateur peut utiliser le mode de Recovery de sécurité pour configurer la position et l'angle du robot.

Pour accéder au module Recovery, appuyez sur le bouton Recovery situé en bas.
Recovery logicielle : En mode Servo Off, si une situation d'erreur de violation de sécurité causée par des violations de sécurité liées à la position, telles que la sortie du robot de la zone de fonctionnement ou la violation de zones interdites, se produit ou une force est appliquée en continu lorsque le robot est arrêté en raison d'une collision avec un objet fixe, Servo on ou Jog ne peut pas être défini même lorsque vous tentez de réinitialiser le robot à un état normal à l'aide du Jog ou du programme. Dans de tels cas, le mode Recovery logicielle est utilisé pour réinitialiser le robot à la normale.
Mode emballage : Pour l'emballage et le transport du robot, le robot peut être réglé sur des valeurs prédéfinies (qui vont au-delà de la limite d'angle de fonctionnement normal) pour le transport.
Si le servo est activé lorsque le module de Recovery est lancé, la fenêtre contextuelle suivante s'affiche et le servo est automatiquement désactivé.
Utilisation du mode de Recovery logicielle
Mode de Recovery logicielle
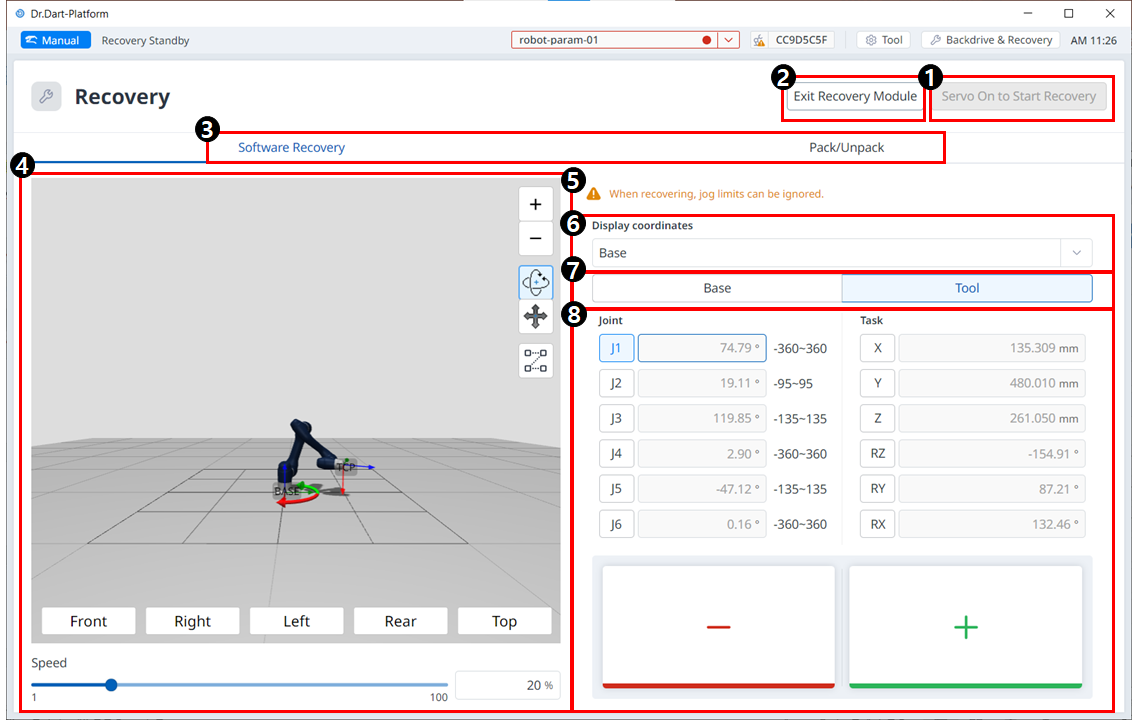
Menu
Éléments | Description | |
|---|---|---|
| 1 | Servo activé pour démarrer la Recovery | Il s'agit d'un bouton permettant d'activer le servo avant de passer en mode Recovery. |
| 2 | Quittez la Recovery | Ce bouton vous permet de quitter le module Recovery. |
| 3 | En-tête | Cette section vous permet de sélectionner le mode Recovery logicielle ou le mode Pack/Unpack. |
| 4 | 3D Simulation | Cette zone vous permet de prévisualiser une simulation 3D des valeurs définies. |
| 5 | Message d'avertissement | Ceci explique les précautions à prendre. |
| 6 | Afficher les coordonnées | C'est ici que vous pouvez définir les coordonnées en fonction de la base ou du monde. |
| 7 | Bouton base/outil | C'est ici que vous pouvez définir la valeur en fonction de la Base ou de l'outil. |
| 8 | Joint/tâche | Cette section vous permet de saisir les valeurs souhaitées pour déplacer le robot. |
Pour utiliser le mode de récupération du logiciel, procédez comme suit :
Appuyez sur le menu Recovery dans le volet d'en-tête. L'écran Recovery logicielle apparaît automatiquement dans la fenêtre Recovery.
Appuyez sur chaque bouton joint sur le côté droit de l'écran récupération de logiciel et utilisez les boutons
 ,
,  pour définir la position. Ou appuyez sur les boutons du cockpit pour régler l'angle d'articulation par apprentissage direct.
pour définir la position. Ou appuyez sur les boutons du cockpit pour régler l'angle d'articulation par apprentissage direct.Pour la définition des boutons dans le cockpit, se reporter à Cockpit
Les modifications apportées au paramètre sont reflétées dans la fenêtre de simulation à gauche en temps réel.
Lorsque le réglage est terminé, appuyez sur le bouton X en haut à gauche pour fermer la fenêtre.
Attention
Le mode de réparation du logiciel n'est pas disponible lorsque la limite d'angle de joint est dépassée de 3 degrés.
Utilisation de Pack/Unpack
Menu
Éléments | Description | |
|---|---|---|
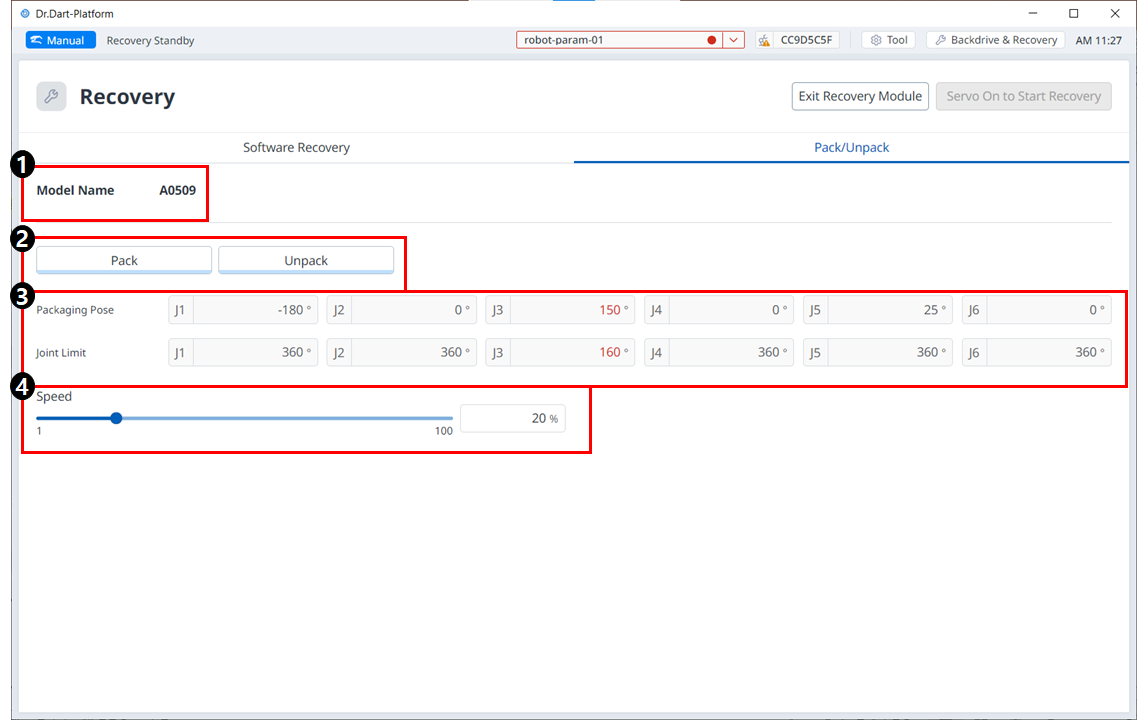
| 1 | Model Name | Le nom du modèle de robot connecté s'affiche. |
| 2 | Emballer/déballer | Vous pouvez sélectionner Emballer ou déballer. |
| 3 | Position d’emballage / Joint Limit | Les valeurs limites de pose et d'articulation s'affichent. |
| 4 | Rapport de vitesse | La vitesse du mode pack ou déballage peut être ajustée via un curseur ou une entrée. |
Pour configurer le mode empaquetage, procédez comme suit :
Appuyez sur le menu Recovery dans le volet d'en-tête.

Sélectionnez l' onglet Packaging mode.

Appuyez sur le bouton Servo on to Start Recovery pour activer le mode packaging.

Le robot se déplace automatiquement vers la pose d'emballage définie.
Le bouton Pack vous permet de placer le robot en position Pack et le bouton Unpack vous permet de placer le robot en position initiale par défaut.