
Position initiale et cockpit
Position initiale

Menu
Éléments | Description | |
|---|---|---|
| 1 | Option de position par défaut | Il s'agit de la section dans laquelle vous pouvez sélectionner l'option position par défaut. |
| 2 | Valeur de position par défaut | Il s'agit des valeurs qui correspondent à la position par défaut, toutes égales à 0. |
| 3 | Option de position personnalisée | Cela vous permet de sélectionner l'option position personnalisée. |
| 4 | Saisie de la valeur de position personnalisée | C'est la section où vous pouvez entrer des valeurs pour les 6 axes, appliquer Get pose et les initialiser. |
| 5 | Position initiale | Ce bouton vous permet de définir la position par défaut ou la position personnalisée que vous définissez comme position initiale. |
| 6 | Message d'avertissement | Un message d'avertissement s'affichera lors de la configuration. |
| 7 | Enregistrer | La valeur de réglage peut être appliquée. |
Avertissement
Lorsqu'un robot ou une articulation d'un robot est en cours de permutation, la position initiale personnalisée doit être réinitialisée.
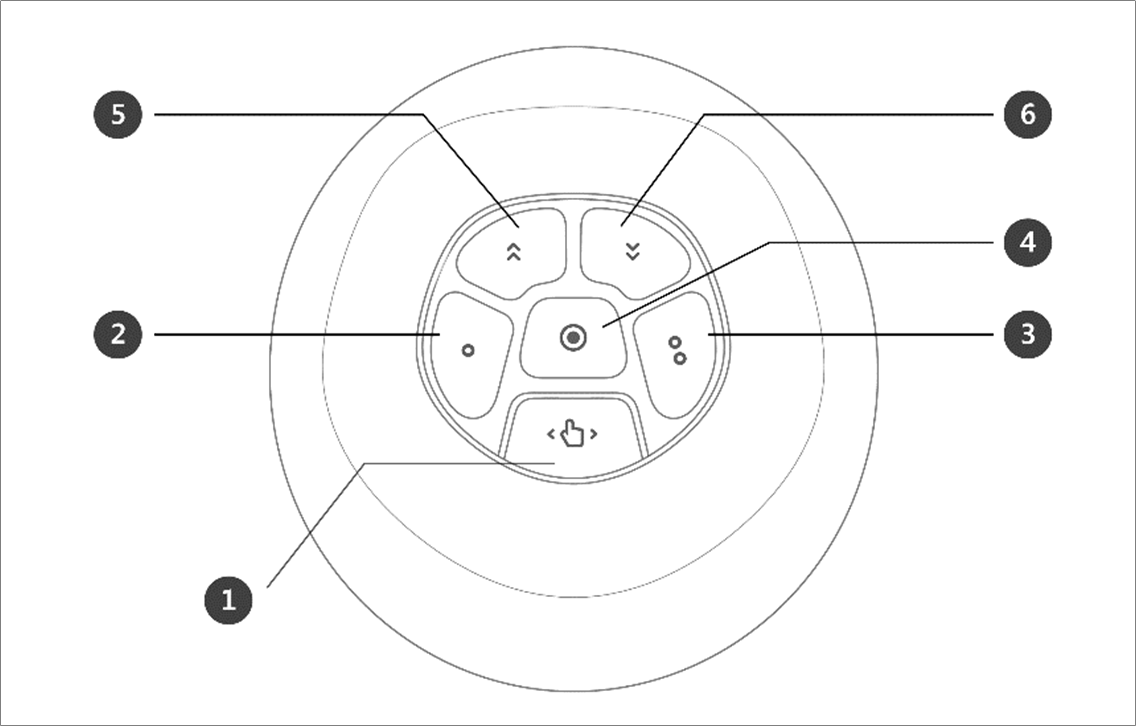
Cockpit
L'apprentissage direct est utilisé pour tenir l'extrémité du robot avec ses mains pour pousser et tirer le robot vers la pose souhaitée, et appliquer la pose au mouvement actuellement sélectionné. Il existe deux méthodes d'enseignement direct.
Freedrive : Chaque articulation se déplace dans la direction de la force appliquée par l'utilisateur
Mouvement contraint : L'extrémité du robot se déplace ou pivote uniquement dans la direction définie dans le mouvement contraint, même lorsque la force est appliquée à partir d'une direction aléatoire
Freedrive
Lorsque le bouton 1 est enfoncé, le mode Freedrive est activé, permettant au robot d'être déplacé librement. Chaque joint se déplace dans la direction de la force appliquée par l'utilisateur. Le robot ne peut pas être déplacé manuellement une fois le bouton relâché.
Pendant l'apprentissage direct, la LED du robot clignote en cyan.
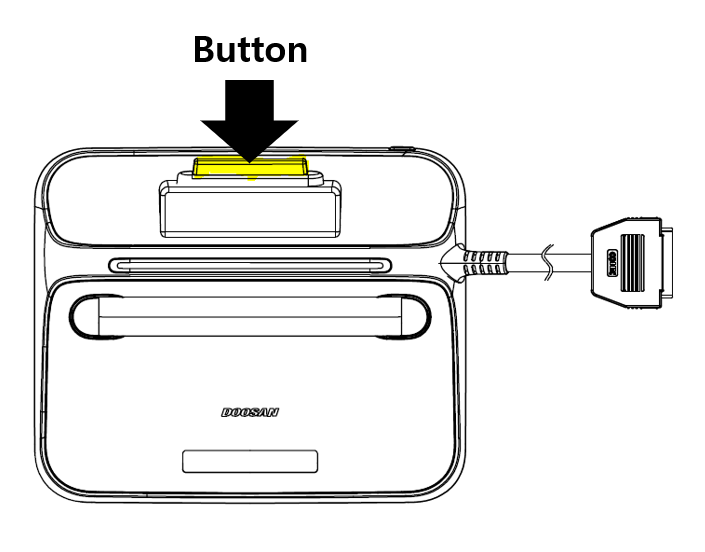
Appuyer sur le bouton Hand Guide à l’arrière du boîtier d’apprentissage activera le mode Freedrive, tout comme l’appui sur le Bouton 1, et le robot pourra être déplacé librement.
Mouvement contraint
Lorsque le bouton 2 et le bouton 3 sont enfoncés, l'extrémité du robot se déplace uniquement dans la direction correspondant à la condition de contrainte, même lorsque la force est appliquée à partir d'une direction aléatoire. La condition de contrainte peut être définie avec 2 des 4 conditions de la figure suivante : Axe Z contraint, plan fixe contraint, surface contrainte et direction contrainte.
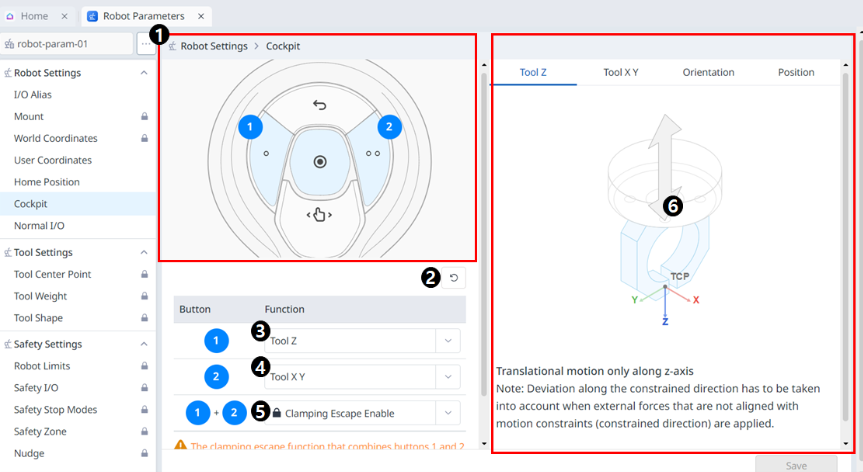
Menu
Éléments | Description | |
|---|---|---|
| 1 | Image cockpit | Ceci est une image pour les paramètres du cockpit. |
| 2 | Réinitialiser | Ce bouton vous permet d'initialiser les valeurs définies. |
| 3 | Réglage 1 bouton | Il s'agit de la section où vous pouvez sélectionner la fonction à régler pour le bouton 1. |
| 4 | Réglage 2 bouton | Il s'agit de la section où vous pouvez sélectionner la fonction à régler pour le bouton 2. |
| 5 | Réglage des boutons 1+2 | Il s'agit de la section où vous pouvez choisir d'activer ou non le serrage des boutons 1+2. |
| 6 | Image guide | Image de guidage pour les éléments de réglage du cockpit. |
Obtention de l'état du bouton Cockpit
L'utilisateur peut obtenir des informations indiquant si le bouton Cockpit est enfoncé ou relâché.
Le robot permet de contrôler le bouton Cockpit, ce qui lui permet d'être utilisé dans diverses applications.
Les "données de surveillance" dans l'API de communication fournissent des informations sur le bouton Cockpit.
Si vous appuyez sur le bouton Cockpit du robot ou vice versa, vous pouvez le détecter via l'API DRL.
API DRL : get_cockpit_input (reportez-vous au Manuel de programmation.)
Paramètres : (int) index
Retours : (int) 1 : Enfoncé (le bouton est enfoncé), 0 : Relâché (le bouton n'est pas enfoncé)