
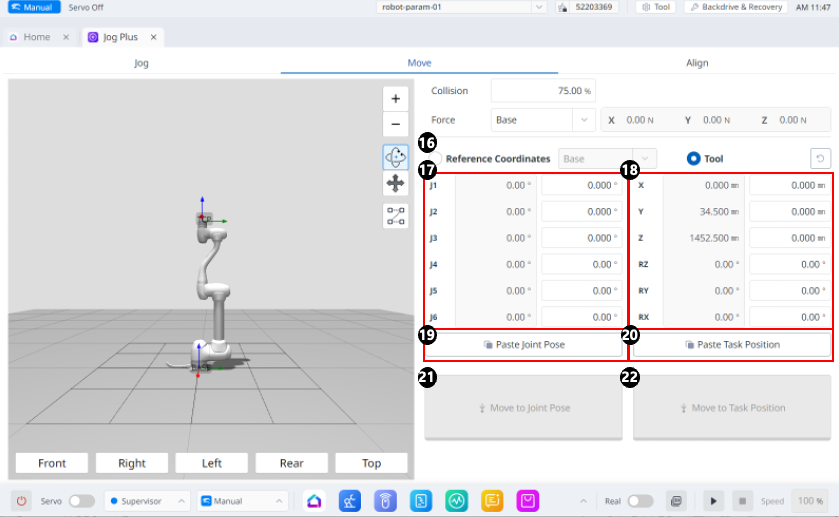
Panneau « Déplacer »
Menu
Éléments | Description | |
|---|---|---|
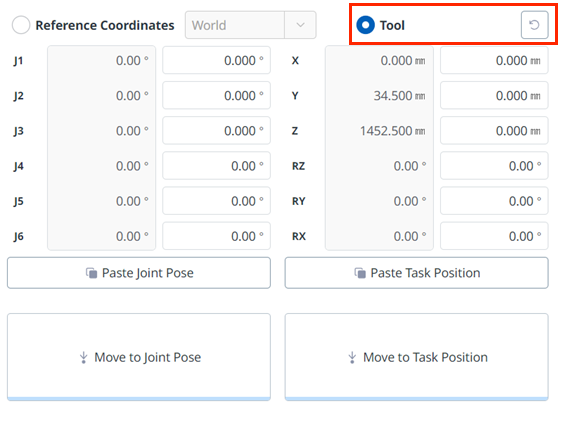
16 | Sélectionnez système de coordonnées de référence | Sélectionnez le système de coordonnées de référence à utiliser pour les coordonnées de la tâche dans la figure 18. Vous pouvez choisir les coordonnées de base, universelles ou utilisateur. |
17 | Posture articulaire | Affiche la posture actuelle du robot et la posture de l'articulation cible. |
18 | Posture de la tâche | Affiche la posture actuelle du robot et la posture de la tâche cible qui correspondent au système de coordonnées de référence sélectionné. |
19 | Coller la posture articulaire | Collez la valeur de posture copiée dans le presse-papiers dans le panneau posture de la liaison. |
20 | Coller la posture de la tâche | Collez la valeur de posture copiée dans le presse-papiers dans le panneau posture de la tâche. |
21 | Bouton de déplacement du joint | Ce bouton permet au robot de se déplacer vers la posture de liaison cible. |
22 | Bouton déplacer la tâche | Ce bouton amène le robot à se déplacer vers la posture de tâche cible. |
Réglage de l'angle à déplacer
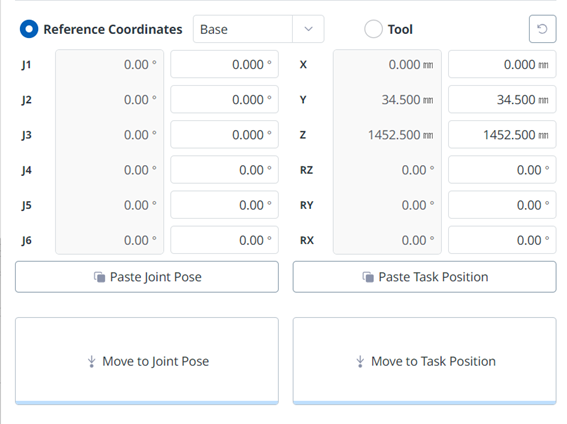
Pour déplacer le robot à un angle spécifique, procéder comme suit :
Sélectionnez l'onglet déplacer.
Entrez l'angle cible de la liaison robot. (J4 est désactivé pour les modèles de la série P)
Activez le mode réel.
Appuyez sur le bouton déplacer vers la pose conjointe correspondante et maintenez-le enfoncé pour régler l'angle de l'articulation du robot.
Définition des coordonnées de référence de base à déplacer
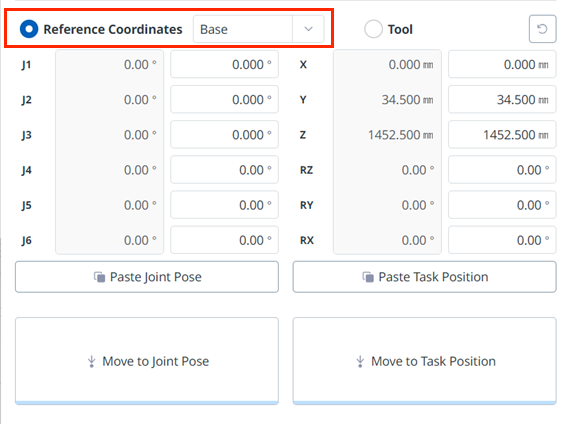
Pour déplacer le robot en fonction de ses coordonnées de base, procéder comme suit :
Sélectionnez l' onglet déplacer et coordonnées de référence.
Sélectionnez la coordonnée d'affichage comme base.
Appuyez sur le bouton déplacer vers la pose de tâche correspondante et maintenez-le enfoncé pour vous déplacer vers les coordonnées définies.
Définition des coordonnées du monde coordonnées de référence à déplacer
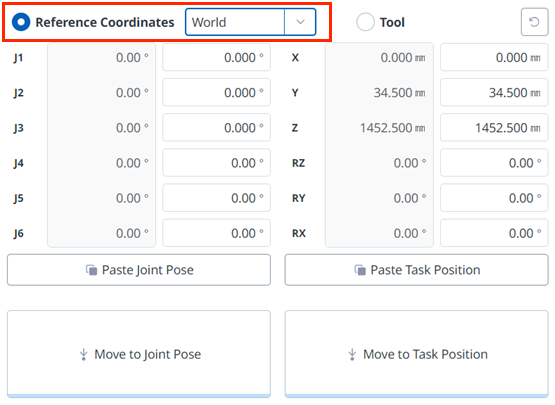
Pour déplacer le robot en fonction des coordonnées du monde, procédez comme suit :
Sélectionnez l’onglet déplacer et coordonnées de référence.
Sélectionnez monde comme coordonnées d'affichage et sélectionnez l'onglet monde.
Configurez la pose pour qu'elle se déplace en fonction des coordonnées du monde.
Appuyez sur le bouton déplacer vers la pose de tâche correspondante et maintenez-le enfoncé pour vous déplacer vers les coordonnées définies.
Définition des coordonnées à déplacer en fonction de l'outil
Pour déplacer le robot en fonction des coordonnées de l'outil, procéder comme suit :
Sélectionnez l' onglet déplacer, puis l'onglet outil.
Configurez la pose pour qu'elle se déplace en référence à l'outil.
Appuyez sur le bouton déplacer vers la pose de tâche correspondante et maintenez-le enfoncé pour vous déplacer vers les coordonnées définies.