
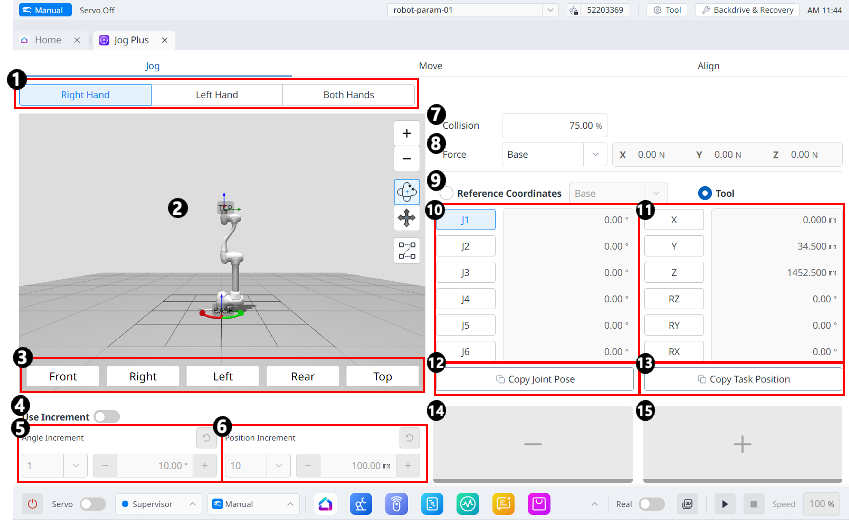
Panneau JOG
Menu
Éléments | Description | |
|---|---|---|
| 1 | Sélectionnez le type de panneau | Vous pouvez choisir l'emplacement du bouton de déplacement. |
| 2 | 3D Simulation | Il s'agit de la visionneuse 3D, où vous pouvez voir à quoi ressemble le robot. |
| 3 | Alignement du simulateur | Vous pouvez utiliser cette section pour diriger le simulateur. |
| 4 | Utiliser l'incrément | Ce bouton vous permet d'activer les incréments d'angle ou de position. |
| 5 | Incrément d'angle | Cette section est l'endroit où l'incrément d'angle sur l'axe sélectionné est défini. |
| 6 | Incrément de position | Cette section est l'endroit où l'incrément de position sur l'axe sélectionné est défini. |
| 7 | Collision | Ce champ permet de définir la collision du robot. |
| 8 | Forcer la surveillance | Cette section vous permet de définir les forces sur les axes X, y et Z en fonction de base, outil, monde, référence, entre autres. |
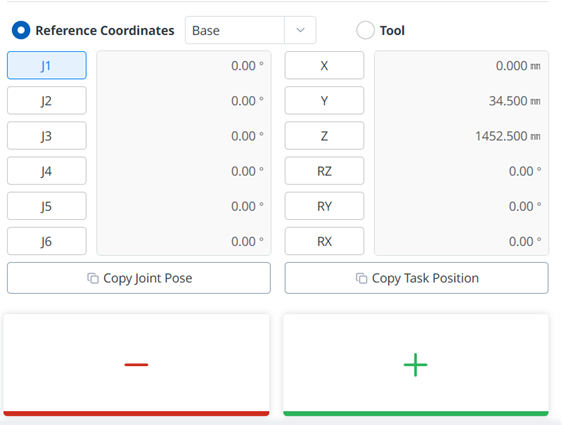
| 9 | Sélectionnez système de coordonnées de référence | Sélectionnez le système de coordonnées de référence à utiliser pour les coordonnées de la tâche dans la figure 11. Vous pouvez choisir les coordonnées de base, universelles ou utilisateur. |
| 10 | Panneau de joint | Vous pouvez sélectionner l'axe de liaison à décaler. |
| 11 | Panneau des tâches | Vous pouvez sélectionner l'axe de tâche à parcourir. |
| 12 | Bouton Copier la pose J | Ce bouton permet de copier la Pose J. |
| 13 | Bouton Copier la pose X | Ce bouton vous permet de copier Pose X. |
| 14 | Déplacer - Bouton | Vous pouvez faire déplacer le robot dans la direction - en fonction de chaque axe. À ce stade, vous pouvez déterminer la direction du - et du + sur la simulation 3D sur le côté gauche. |
| 15 | Déplacer + Bouton | Vous pouvez faire déplacer le robot dans la direction + en fonction de chaque axe. À ce stade, vous pouvez déterminer la direction du - et du + sur la simulation 3D sur le côté gauche. |
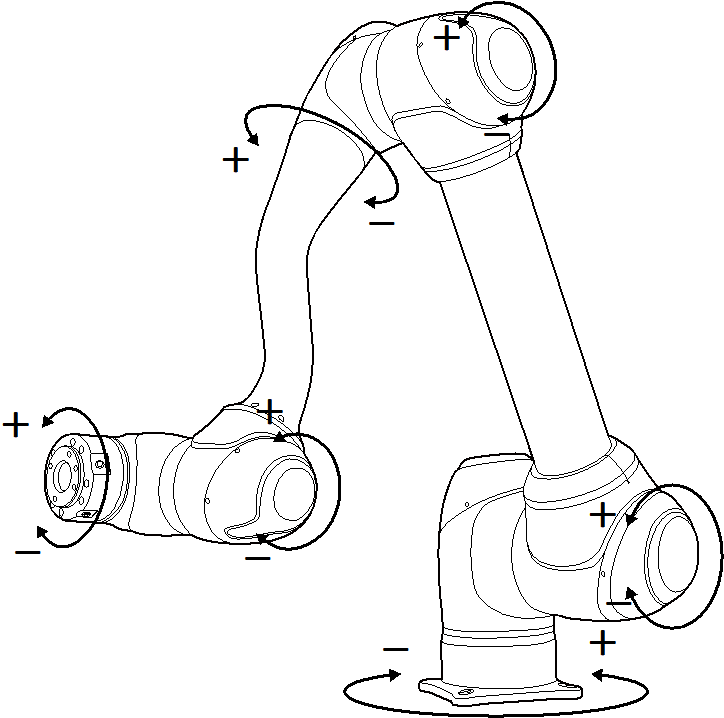
Exécuter en fonction de la liaison robot
Pour régler l'angle en fonction de la liaison du robot, procédez comme suit :
Sélectionnez l'axe (J1-J6) pour ajuster l'angle sur le panneau de joint.
Appuyez sur les boutons de direction (
 ,
,  ) et maintenez-les enfoncés pour régler l'angle de l'axe correspondant.
) et maintenez-les enfoncés pour régler l'angle de l'axe correspondant.
Exécution basée sur la Base du robot

Pour déplacer le robot en fonction de ses coordonnées de base, procéder comme suit :
Sélectionnez la Base comme système de coordonnées de référence.
Dans le panneau des tâches, sélectionnez l'axe (X~RX) pour lequel vous souhaitez régler l'angle.
Appuyez sur le bouton de direction (+, -) et maintenez-le enfoncé pour déplacer l'axe correspondant.
Exécution basée sur les coordonnées du monde

Pour déplacer le robot en fonction des coordonnées du monde, procédez comme suit :
Sélectionnez le monde comme système de coordonnées de référence.
Dans le panneau des tâches, sélectionnez l'axe (X~RX) pour lequel vous souhaitez régler l'angle.
Appuyez sur le bouton de direction (+, -) et maintenez-le enfoncé pour déplacer l'axe correspondant.
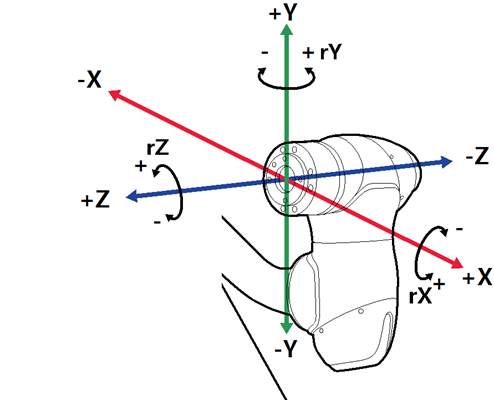
Exécution basée sur robot Tool

Pour déplacer le robot en fonction de l'outil robot, suivez ces étapes :
Sélectionnez l' outil comme système de coordonnées de référence.
Dans le panneau des tâches, sélectionnez l'axe (X~RX) pour lequel vous souhaitez régler l'angle.
Appuyez sur le bouton de direction (+, -) et maintenez-le enfoncé pour déplacer l'axe correspondant.
Remarque
La zone de sécurité ne s'applique pas en mode virtuel.
Rx, Ry et Rz sont exécutés en fonction de TCP (position du centre de l'outil).