
Configuration et description du système robot
Liste des composants
 |  |
Manipulateur | Contrôleur (en option (en option : voir annexe) |
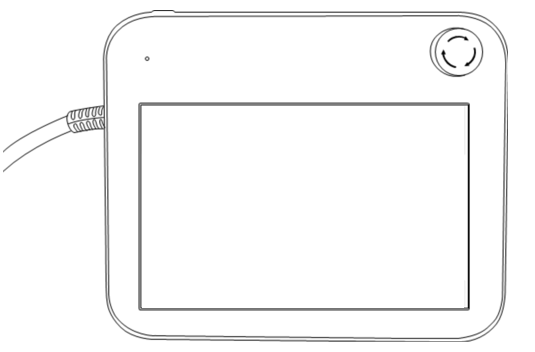 |  |
Boîtier d'apprentissage | Câble d'alimentation du contrôleur |
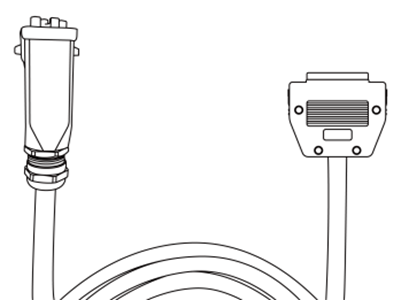 |  |
Câble de connexion du manipulateur | Manuel d'utilisation / guide rapide |
Nom de chaque pièce et fonctions
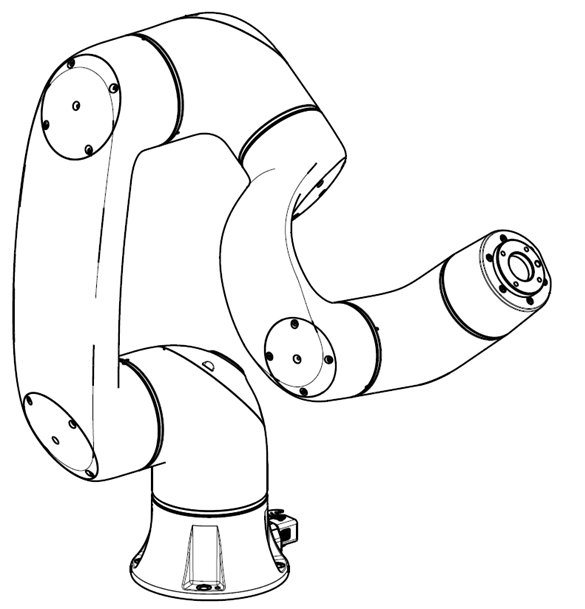
Manipulateur
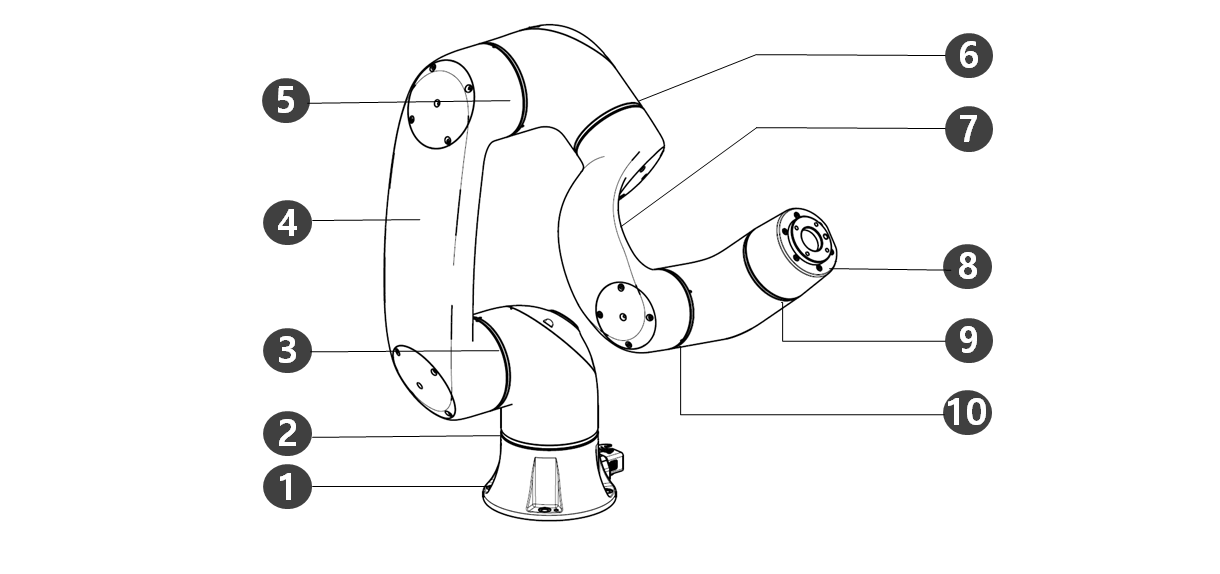
Nom de chaque pièce
No. | Nom | No. | Nom |
|---|---|---|---|
1 | Base | 6 | J4 |
2 | J1 | 7 | Link2 |
3 | J2 | 8 | Bride d'outil |
4 | Link1 | 9 | J5 |
5 | J3 | 10 | J6 |
ㅤ
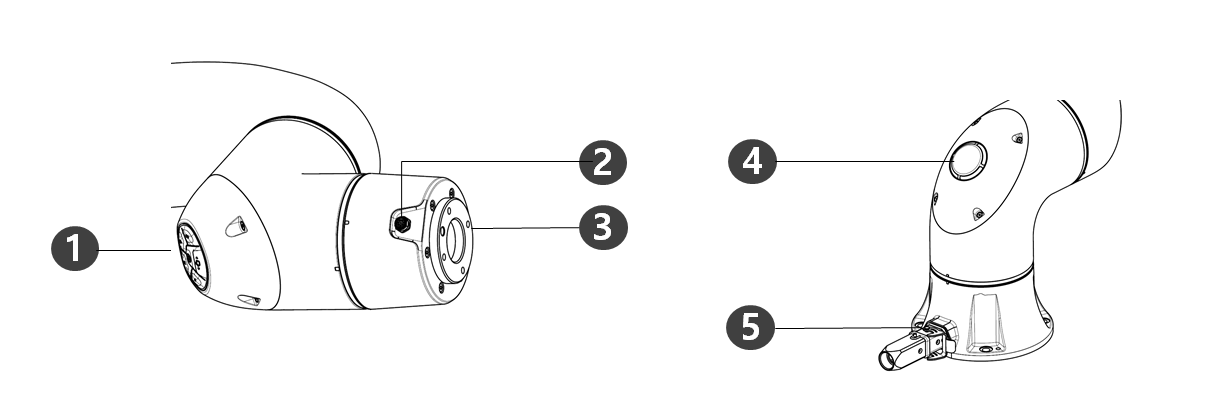
Fonctionnalités clés
No. | Éléments | Description |
|---|---|---|
1 | Cockpit | [Option] contrôleur utilisé pour l'apprentissage direct. |
2 | E/S de bride | Port d'E/S pour le contrôle des outils. |
3 | Bride d'outil | Zone d'installation des outils. |
4 | LED | Affiche l'état du robot avec différentes couleurs. Pour plus d'informations sur l'état du robot, reportez-vous à la section Couleur des voyants d'état et de bride pour chaque mode. |
5 | Connecteur | Utilisé pour alimenter et communiquer le robot. |
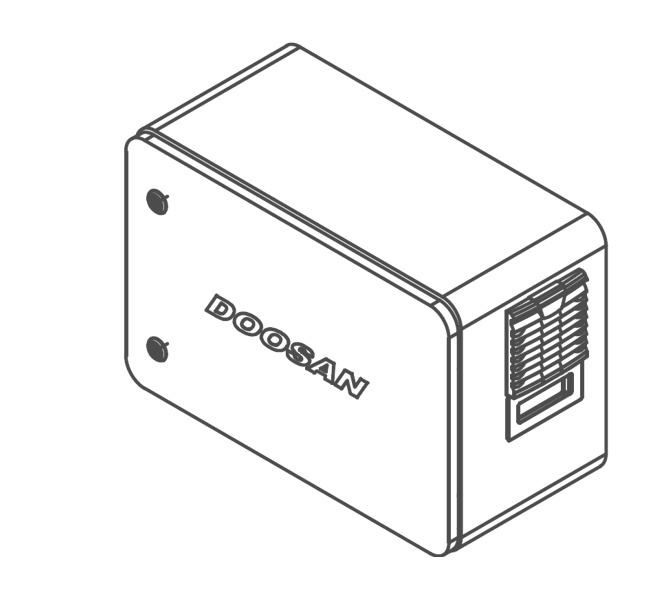
Contrôleur
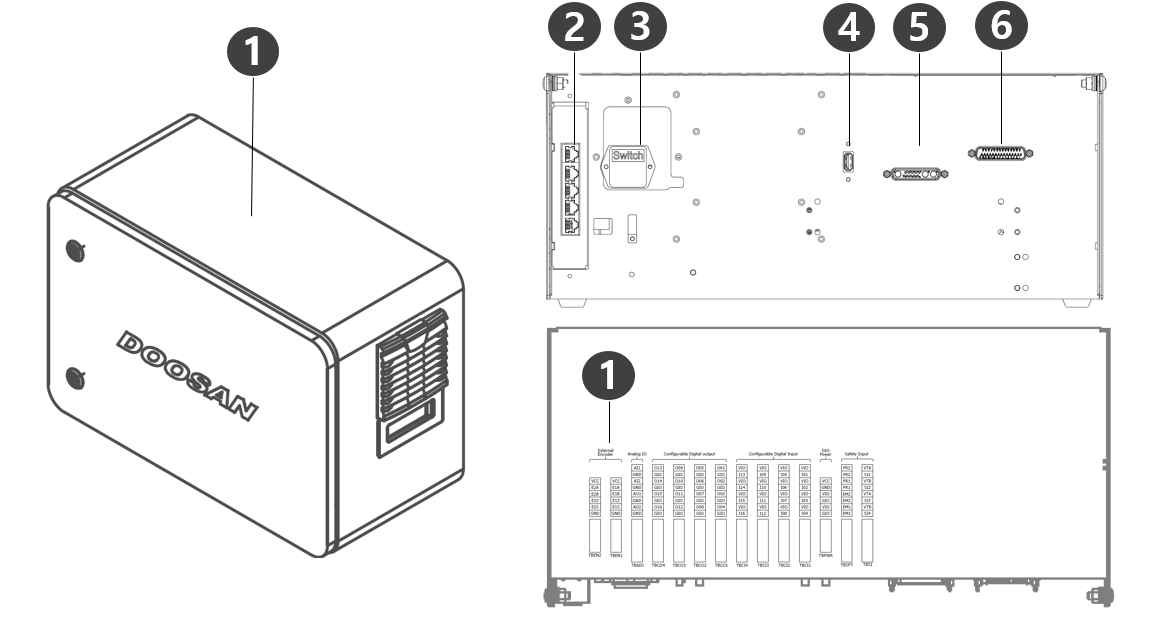
No. | Éléments | Description |
|---|---|---|
1 | Borne de connexion E/S (interne) | Il peut être connecté aux contrôleurs ou périphériques d'autres robots. |
2 | Terminal de connexion réseau | Utilisé pour la connexion au terminal de connexion réseau à l'intérieur du contrôleur afin d'utiliser des ordinateurs portables, des périphériques TCP/IP et des équipements Modbus. |
3 | Borne/interrupteur de connexion d'alimentation | Utilisé pour connecter l'alimentation secteur du contrôleur pour l'allumer ou l'éteindre. Pour plus d'informations, reportez-vous à la section Mettez le système sous/hors tension. |
4 | Borne de connexion USB | Utilisé pour stocker les journaux créés pendant que le robot fonctionne dans le stockage USB, ou les tâches d'exportation et d'importation. |
5 | Borne de connexion du câble du manipulateur | Utilisé pour connecter le câble du manipulateur au contrôleur. |
6 | Terminal de connexion du câble du boîtier d’apprentissage | Utilisé pour connecter le câble du boîtier d’apprentissage au contrôleur. |
Configuration du système
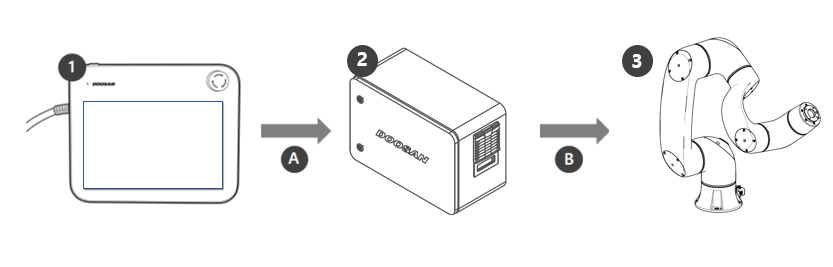
No. | Nom | Description |
|---|---|---|
1 | Boîtier d'apprentissage | Ce dispositif gère l'ensemble du système et est capable d'apprendre au robot des poses spécifiques ou de faire des réglages liés aux manipulateurs et aux contrôleurs. |
2 | Contrôleur | Il contrôle les mouvements du robot en fonction de la pose ou des déplacements définis par le boîtier d’apprentissage. Il dispose de divers ports d'E/S qui permettent la connexion et l'utilisation de divers équipements et périphériques. |
3 | Manipulateur | C’est un robot collaboratif industriel qui peut effectuer des tâches de transport ou d’assemblage avec divers outils. |
A | Commande/surveillance | |
B | Alimentation/réseau |