
Configuration et utilisation de protocoles étendus
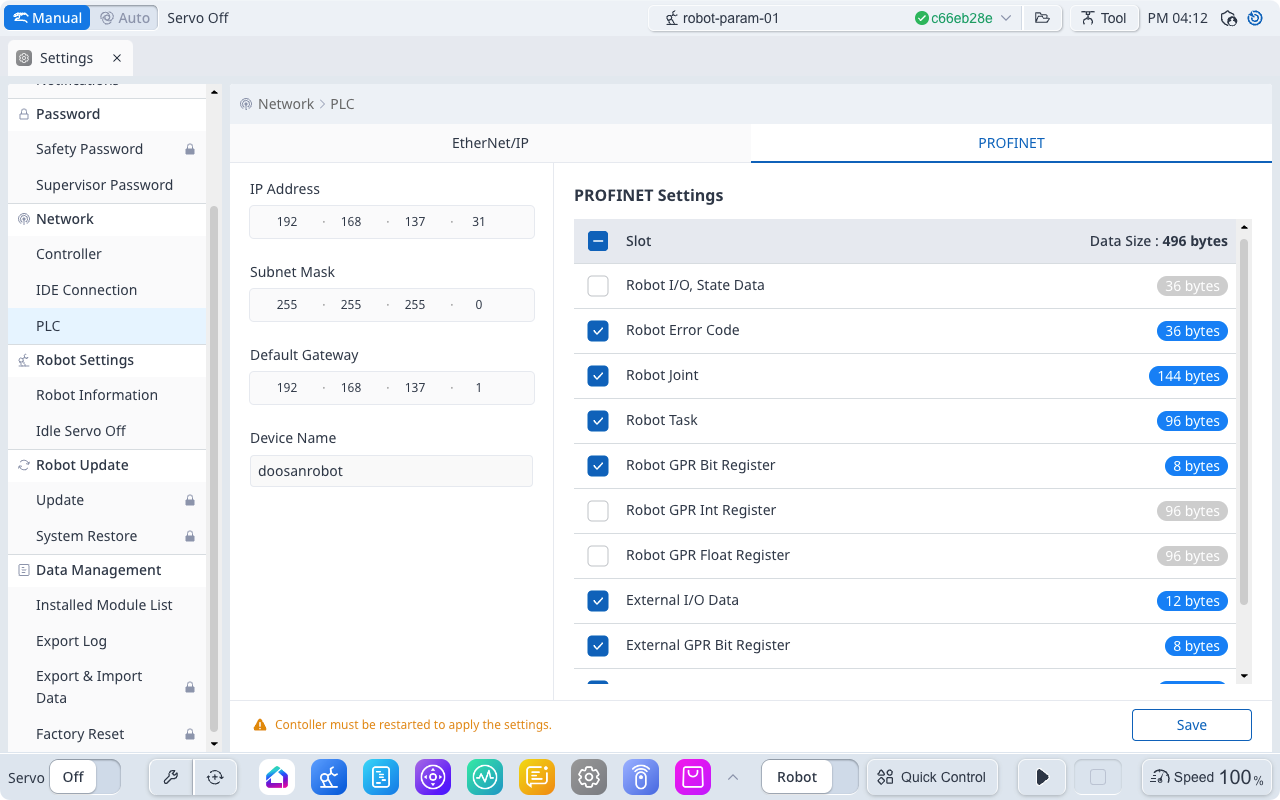
Protocole étendu - Configuration du périphérique d'E/S PROFINET (périphérique PNIO)
Les contrôleurs de robot de Doosan Robotics prennent en charge la fonction PROFITNET IO Device (esclave), qui permet de modifier les données après avoir lu les paramètres du robot à partir d'un périphérique externe (contrôleur/maître PROFINET IO). (Par exemple, surveillance des paramètres du robot, registre à usage général (bit, Int, Float) – utilisation du registre à usage général (GPR))
Remarque) pour plus d'informations sur PROFINET, visitez http://www.profibus.com
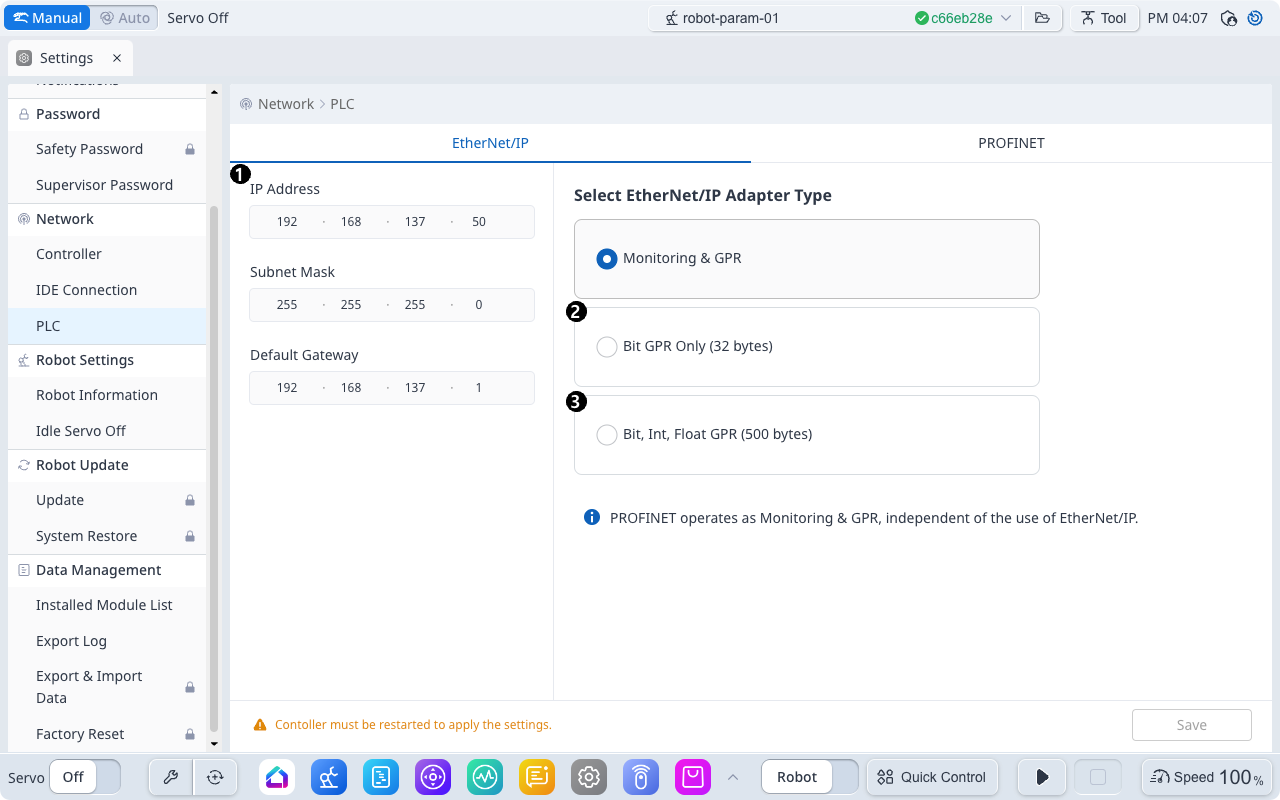
Protocole étendu - Configuration de l'adaptateur Ethernet/IP (adaptateur EIP)
Les contrôleurs de robot de Doosan Robotics prennent en charge la fonction Ethernet/IP adapter (esclave), qui permet de modifier les données après avoir lu les paramètres du robot à partir d'un périphérique externe (Ethernet/IP scanner/Master). (Par exemple, surveillance des paramètres du robot, registre à usage général (bit, Int, Float) – utilisation du registre à usage général (GPR))
Remarque 1) pour plus d'informations sur Ethernet/IP, consultez le site www.odva.org.
Remarque 2) L'adresse IP par défaut initiale est 192.168.137.50. Après cela, vous pouvez modifier l'adresse IP du contrôleur en fonction de l'utilisation de l'application de contrôle API.
Utilisation du protocole étendu
Les fonctions PROFINET IO Device (périphérique PNIO) et Ethernet/IP adapter (adaptateur EIP) démarrent ensemble au démarrage du contrôleur et sont en état de veille de connexion avec le périphérique maître. Par conséquent, pour utiliser la fonction, il est nécessaire de connecter et de configurer le maître. Chaque appareil maître a des caractéristiques différentes, il est donc nécessaire de les vérifier.
Remarque
Vous trouverez ci-dessous des descriptions des caractéristiques de mise en œuvre des fonctions générales pour Industrial Ethernet.
La fonction Industrial Ethernet des contrôleurs Doosan Robotics n'utilise pas un ASIC séparé, mais implémente sa fonction basée sur TCP/IP, de sorte qu'elle ne prend pas en charge les performances en temps réel.
La sortie de données vers des périphériques externes a des marquages identiques (PNIO, EIP), mais l'entrée de données vers le robot a uniquement des structures identiques et ne se lie pas. Par conséquent, la sortie des données du contrôleur PNIO ne se synchronise pas avec les données de sortie du scanner EIP.
Pour la table E/S de PNIO et EIP, veuillez vous reporter à un document séparé (ou pièce jointe).
Carte Ethernet/IP Full GPR
Ethernet/IP Full GPR map est disponible et prend en charge différents types d'E/S dans le robot.
Bit E/S GPR 24ea
Integer E/S GPR 50ea
Float E/S GPR 50ea
Dans le menu de gauche du module Réglages, sélectionner API pour accéder à l'écran ci-dessous. (Veuillez vous reporter à configurer dans la section réseau)
Dans l'image ci-dessous, l'élément 3 est Full GPR map, et le paramètre est enregistré uniquement après l'enregistrement et le redémarrage.
Emplacement Profinet
Pour l'optimisation du réseau, seuls les slots intéressés peuvent utiliser la capacité à effectuer une transaction.
Emplacement # 1 : État du robot (T2O)
Emplacement # 2 : Code d'erreur du robot (T2O)
Emplacement # 3 : Joint (T2O)
Emplacement # 4 : Tâche (T2O)
Emplacement # 5 : Bit GPR (T2O)
Emplacement # 6 : INT GPR (T2O)
Emplacement # 7 : Float GPR (T2O)
Emplacement # 8 : CONTRÔLE E/S (O2T)
Emplacement # 9 : Bit GPR (O2T)
Emplacement # 10 : INT GPR (O2T)
Emplacement # 11 : Float GPR (O2T)
Dans le menu de gauche du module Settings, sélectionner API et sélectionner l'onglet PROFINET pour afficher l'écran ci-dessous. (Veuillez vous reporter à configurer dans la section réseau)
Vous pouvez utiliser la case à cocher au centre pour sélectionner uniquement les emplacements qui intéressent l'utilisateur, et les paramètres ne sont enregistrés qu'après l'enregistrement et le redémarrage.
Informations sur le code d'erreur du robot
Dans un environnement sans TP (IHM), l'utilisateur peut vérifier les informations de code d'erreur du robot via PLC. (Veuillez vous reporter à configurer dans la section réseau)
EtherNet/IP
Remarque
Ethernet/IP reflète jusqu'à deux codes d'erreur en raison de la limite de transaction (500 octets).
Décalage d'octet | Description |
|---|---|
36 | Majeur & Mineur (Code d'erreur #1)
|
40 | Année & mois & jour & heure (Code d'erreur # 1)
|
44 | Minute et seconde et milliseconde (Code d'erreur n° 1)
|
48 | Majeur & Mineur (Code d'erreur #2)
|
52 | Année & mois & jour & heure (Code d'erreur # 2)
|
56 | Minute et seconde et milliseconde (Code d'erreur # 2)
|
ProfiNet: Emplacement # 2 :
Décalage d'octet | Description |
|---|---|
0 | Majeur & Mineur (Code d'erreur #1)
|
4 | Année & mois & jour & heure (Code d'erreur # 1)
|
8 | Minute et seconde et milliseconde (Code d'erreur n° 1)
|
12 | Majeur & Mineur (Code d'erreur #2)
|
16 | Année & mois & jour & heure (Code d'erreur # 2)
|
20 | Minute et seconde et milliseconde (Code d'erreur # 2)
|
24 | Majeur & Mineur (Code d'erreur #3)
|
28 | Année & mois & jour & heure (Code d'erreur # 3)
|
32 | Minute et seconde et milliseconde (Code d'erreur # 3)
|