
Pantalla de movimiento
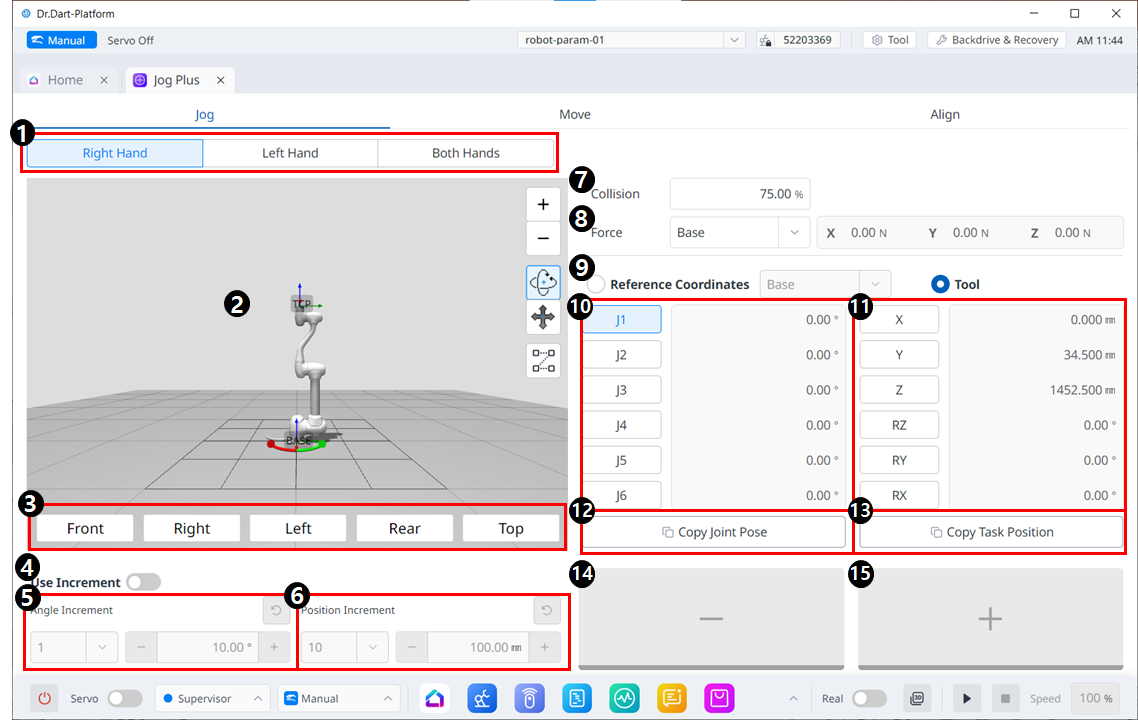
Diseño del menú de desplazamiento
| Artículo | Descripción | |
|---|---|---|
| 1 | Seleccionar tipo de panel | Puede elegir la ubicación del botón de movimiento. |
| 2 | simulación 3D | Este es el visor 3D, donde podrás ver cómo luce el robot. |
| 3 | Alineación del simulador | Puede utilizar esta sección para dirigir el simulador. |
4 | Incremento de ángulo | Este botón le permite habilitar incrementos de ángulo o posición. |
| 5 | Angle Increment | Esta sección es donde se establece el incremento del ángulo en el eje seleccionado. |
| 6 | Incremento de posición | Esta sección es donde se establece el incremento de posición en el eje seleccionado. |
| 7 | Colisión | Este campo es donde configura la colisión del robot. |
| 8 | Monitoreo de fuerza | Esta sección es donde configura las fuerzas en los ejes X, Y y Z según Base, Herramienta, Mundo, Referencia y entre otros. |
| 9 | Seleccionar sistema de coordenadas de referencia | Seleccione un sistema de coordenadas de referencia para mostrar o desplazar las coordenadas de la tarea en la Figura 11. Pueden ser coordenadas base, mundial o de usuario. |
| 10 | Panel de unión | Puede seleccionar el eje de articulación para desplazar. |
| 11 | panel de tareas | Puede seleccionar el eje de la tarea para avanzar. |
| 12 | Copiar pose Botón J | Este botón le permite copiar Pose J. |
| 13 | Botón Copiar pose X | Este botón le permite copiar Pose X. |
| 14 | Mover - Botón | Puede hacer que el robot se mueva en la dirección - según cada eje. En este momento, puede determinar la dirección de - y + en la simulación 3D del lado izquierdo. |
| 15 | Mover + Botón | Puede hacer que el robot se mueva en la dirección + según cada eje. En este momento, puede determinar la dirección de - y + en la simulación 3D del lado izquierdo. |