
Desenganche la posición de embalaje
OBLIGATORIO FÁCIL 3 MIN
El robot está en su posición de embalaje para permitir un fácil transporte o embalaje. Para utilizar el robot, es necesario desenganchar la postura de embalaje. Como el robot mantiene una postura que excede el límite de ángulo de unión cuando está en posición de embalaje, es imposible establecer el estado Servo en ON debido a la violación del límite de seguridad. El LED del robot se ilumina en rojo en este estado.
Nota
Si hay un caso en el que necesita empaquetar el robot debido a la reubicación, establezca la postura del paquete utilizando Move with packaging pose en el modo de empaquetado.
El proceso de liberación de la postura de embalaje es el siguiente:
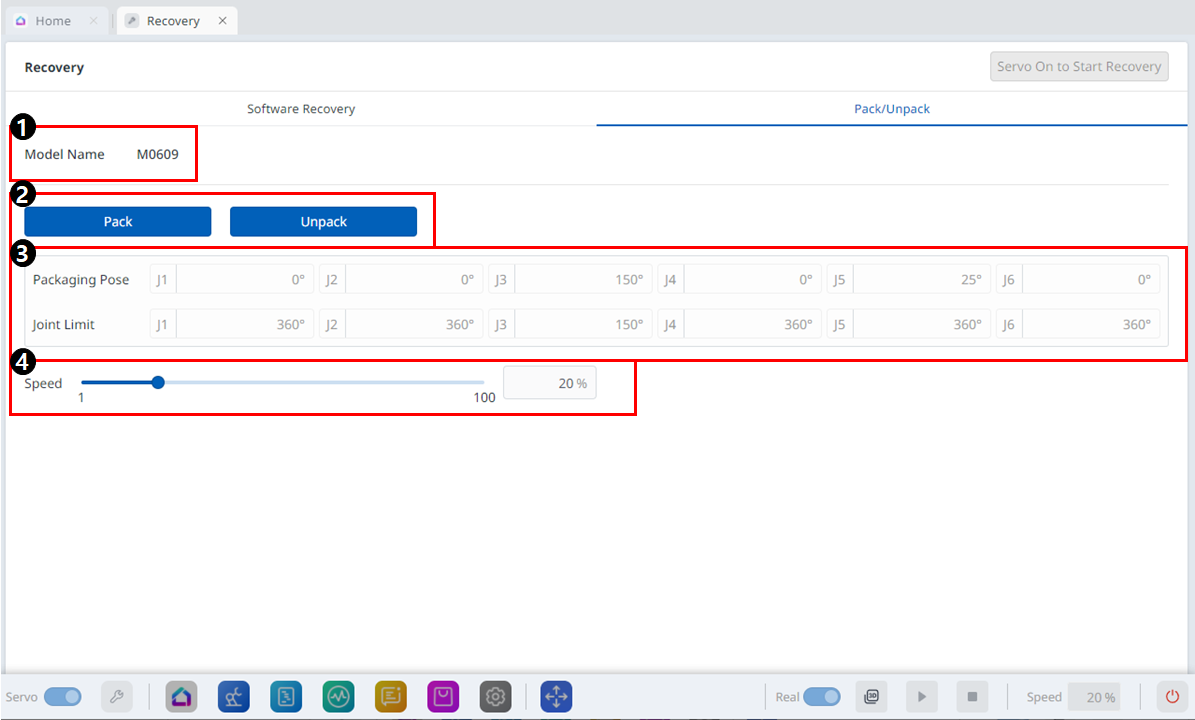
Elementos de menú
| Elemento | Descripción | |
|---|---|---|
| 1 | Nombre del modelo | Aparece el nombre del modelo de robot conectado. |
| 2 | Empaquetar/Desempaquetar | Puede seleccionar Empaquetar o Desempaquetar. |
| 3 | Posición de empaquetado/límite de junta | Aparecen los valores límite de pose y joint. |
| 4 | Relación de velocidad | La velocidad del modo de empaquetado o desempaquetado se puede ajustar a través de un deslizador o entrada. |
Para configurar el modo de empaquetado, siga estos pasos:
- Toque el menú Recuperación en el panel de cabecera.

- Seleccione la ficha Modo de empaquetado.

- Toque el botón Servo para iniciar la recuperación para activar el modo de empaquetado.

- El robot se mueve automáticamente a la pose de empaquetado establecida.
- El botón Pack le permite colocar el robot en la posición Pack y el botón Unpack le permite colocar el robot en la posición inicial predeterminada.