Configuración de la zona de reducción de la sensibilidad de colisión
Para configurar la zona de reducción de la sensibilidad de colisión, toque el botón 
- Introduzca el nombre de la Workcell en el campo Nombre de celda de trabajo, en la parte superior de la pantalla Configuración de celda de trabajo.
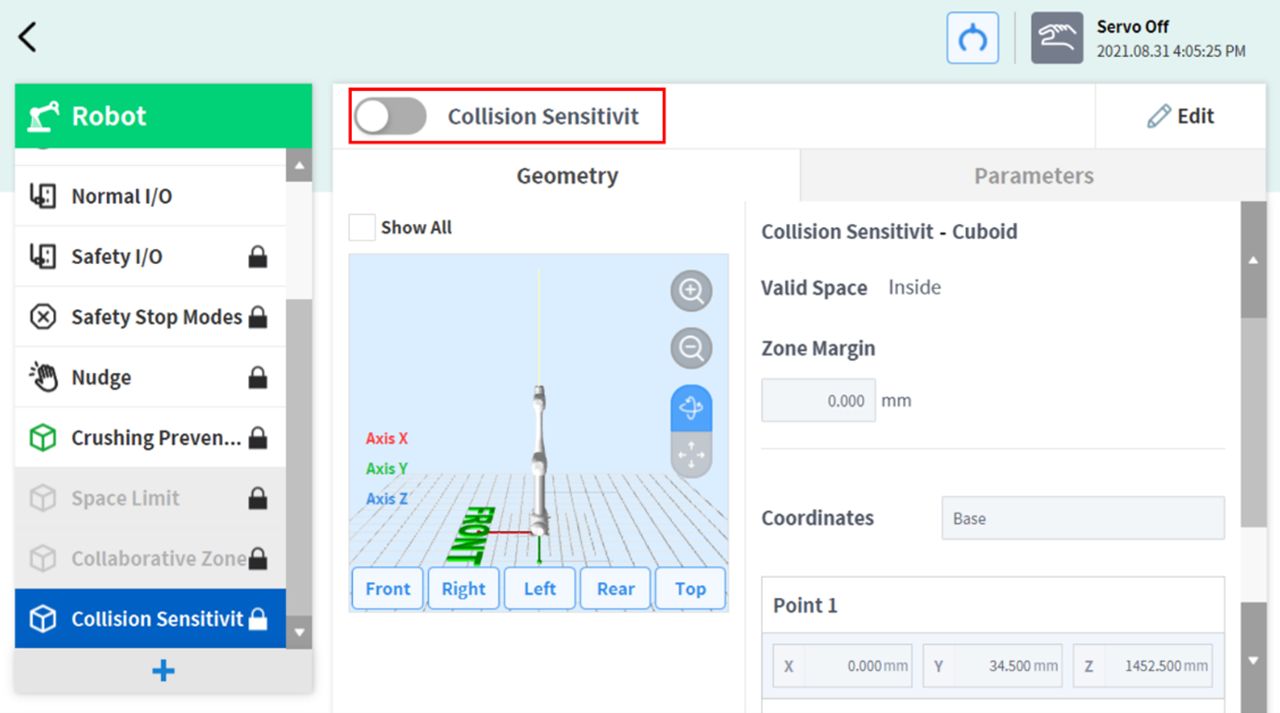
- Establezca la información de postura según la forma de la sección junto con el espacio válido y el margen de zona en la pestaña Geometría.
- Establezca la opción de anulación, los límites del robot/TCP y la activación de zona dinámica en la pestaña Parámetros y pulse Borrador.
Advertencia
- La zona de reducción de la sensibilidad de colisión es una zona de alta prioridad.
- Las zonas de alta prioridad tienen prioridad por sobre las otras zonas y la configuración global de los límites del robot. Además, si hay múltiples zonas de alta prioridad superpuestas, la función de seguridad utiliza el límite de seguridad MENOS Por eso, el tamaño de la zona de alta prioridad se debe especificar lo más pequeño posible por motivos de seguridad.
- Compruebe que todos los parámetros que se muestran sean iguales a los que pretende configurar; luego marque Confirmar borrador y pulse Confirmar.
- Presione el botón para activar la alternancia para aplicar la Zona de reducción de la sensibilidad de colisión.