
Configuración del robot
El diseño de la pantalla de configuración del robot se compone de la siguiente manera:
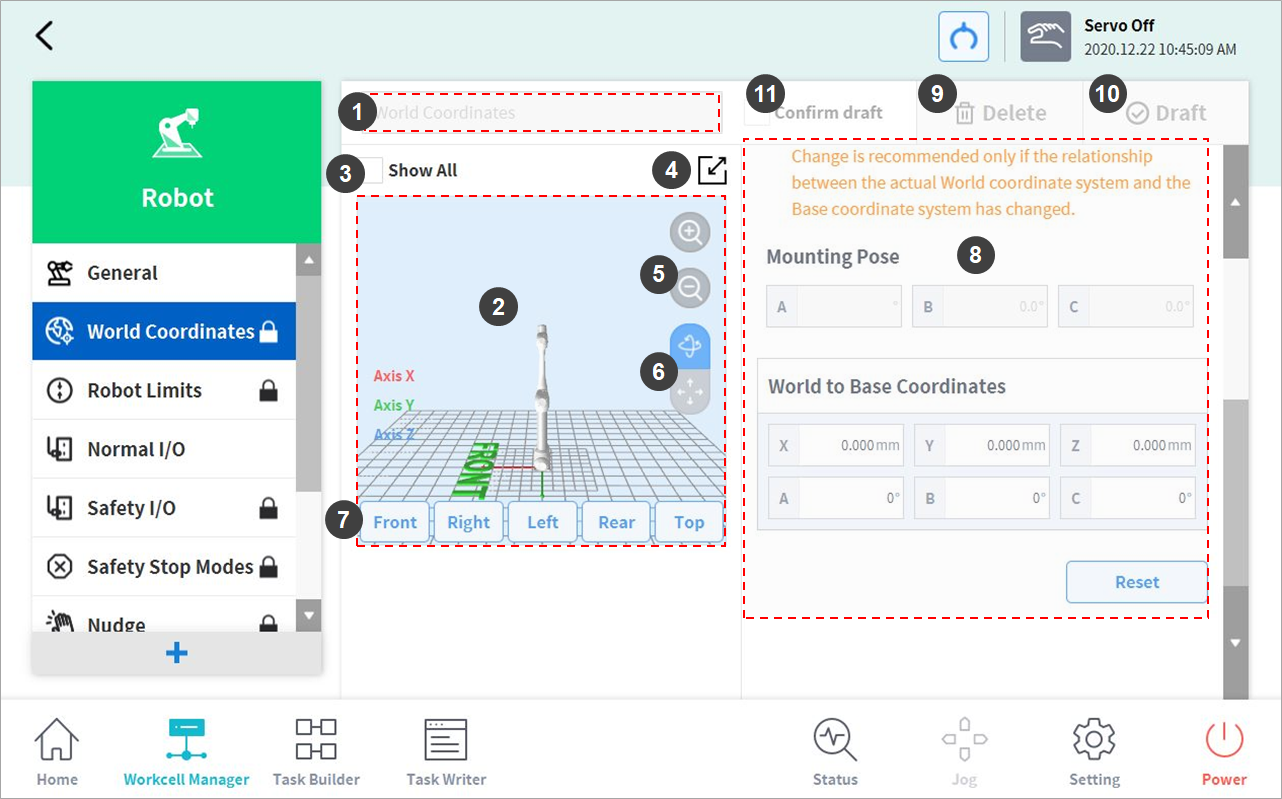
N.º | Elemento | Descripción |
1 | Enter Workcell Name | Introduzca el nombre de la celda de trabajo. |
2 | Simulation Screen | Muestra la simulación del espacio de trabajo de la celda de trabajo. |
3 | View All | Se muestran todas las otras celdas de trabajo registradas. Seleccionar todas las casillas de verificación permite ver toda la función. Desmarcar las casillas de verificación desactiva la función. |
4 | Change to Full Screen ( | La pantalla de simulación se muestra como una pantalla completa. Toque el botón minimizar ( |
5 | Zoom In ( | Acerque o aleje la pantalla de simulación. |
6 | Rotate ( | Rote o mueva la pantalla de simulación. Toque el botón y arrastre o toque la pantalla para controlar. |
7 | Simulator Direction Setting | Establece la dirección del simulador. La simulación se muestra desde la dirección seleccionada. |
8 | Workspace | Muestra el espacio de trabajo de la celda de trabajo. |
9 | Delete | Elimina la celda de trabajo actual. |
10 | Draft Confirm | Borrador: Guarda temporalmente la configuración del espacio de trabajo de la celda de trabajo. Confirmar: Guarda la copia de seguridad actual o la copia de seguridad temporal confirmada de la configuración del espacio de trabajo de la celda de trabajo. (Para celdas de trabajo relacionadas con la seguridad únicamente, el botón Confirmar aparece después de que se ha llevado a cabo Confirmar copia de seguridad temporal. Para celdas de trabajo generales, solamente se muestra el botón Confirmar.) |
11 | Confirm Draft | Confirma el guardado de la configuración del espacio de trabajo guardada temporalmente. (Aparece únicamente para las celdas de trabajo relacionadas con la seguridad y no aparece para celdas de trabajo generales.) |





