
Alineación basada en eje base / eje geográfico
Cuando el elemento de trabajo se encuentra en la dirección del eje base/geográfico del robot, es posible alinear el TCP en la pieza de trabajo antes de llevar a cabo la enseñanza. La postura de enseñanza se puede configurar acorde con el eje de las coordenadas base/geográfica, lo que facilita la especificación de una postura de enseñanza. Para llevar a cabo la enseñanza después de bloquear la postura, utilice la función de enseñanza directa de plano o línea bloqueada con los botones de la "Cabina".
Alinea la TCP del robot en función del eje base, siga las siguientes indicaciones:
- Seleccione la pestaña Alinear y luego la pestaña Alineación básica.
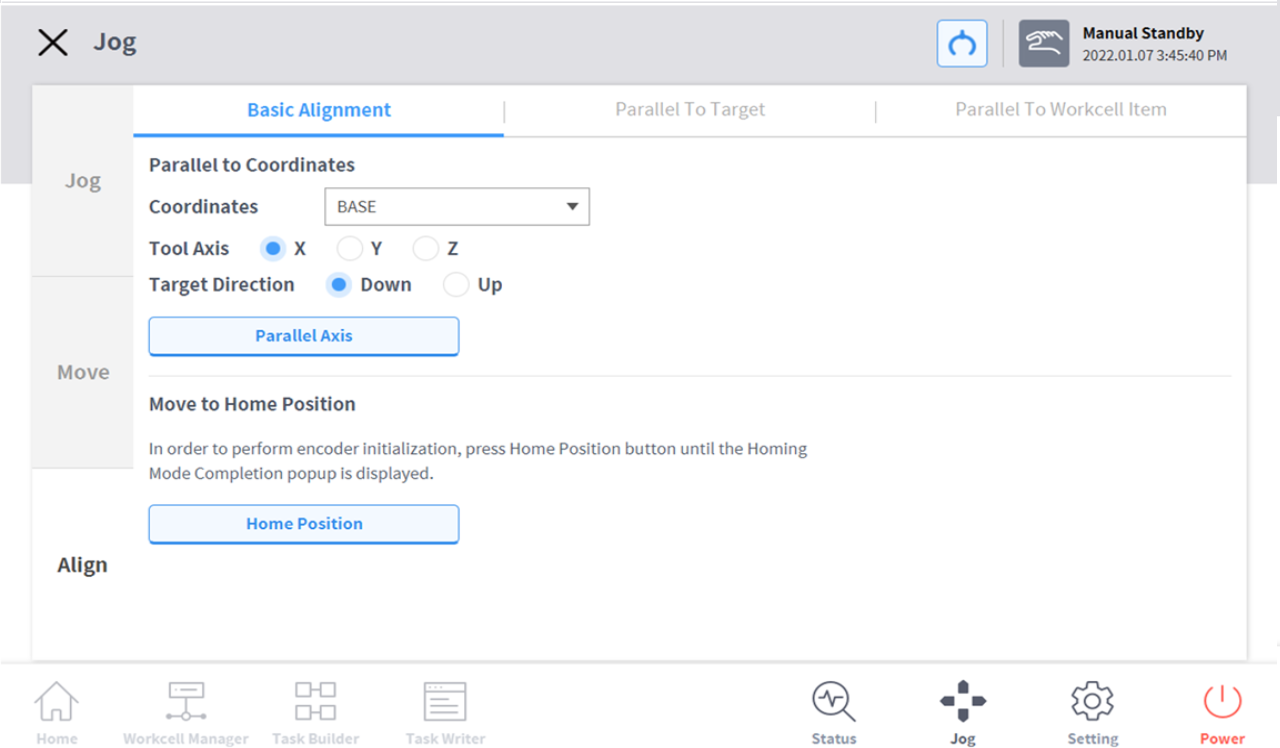
- Seleccione las coordenadas de referencia para alineación.

- Seleccione el eje de herramienta de referencia.

- Seleccione la dirección de alineación.

- Mantenga pulsado el botón Alinear eje para alinear el eje.