
Módulo de Remote Control
El módulo Remote Control permite ejecutar el control remoto para tareas que ya ha creado.
En Autoridad del operador, puede iniciar el modo de Remote Control, pero no puede modificar la configuración de IO. La configuración de IO solo se puede cambiar con la autoridad del administrador.
Menú
Temas | Descripción | |
|---|---|---|
| 1 | Advertencia | Esto mostrará las precauciones necesarias al usar el módulo. |
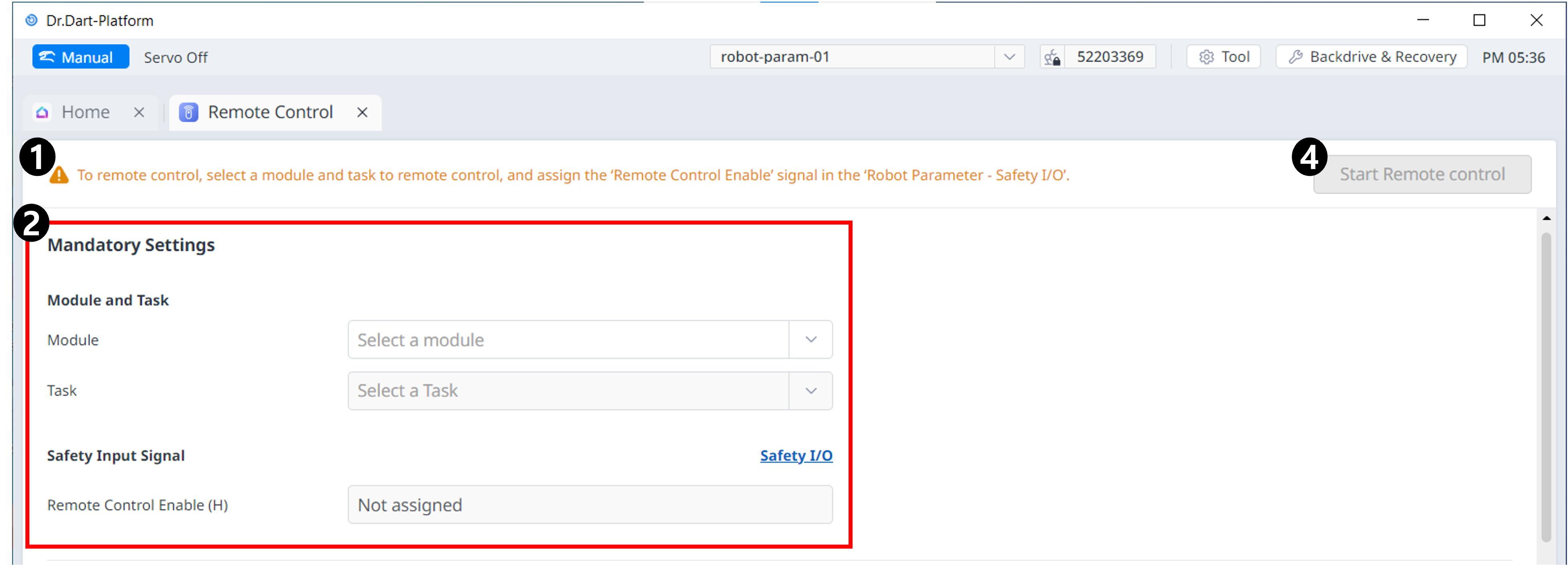
| 2 | Configuraciones obligatorias | Esta es una configuración obligatoria para el control remoto. Puede configurar módulos y tareas y establecer señales de entrada seguras. |
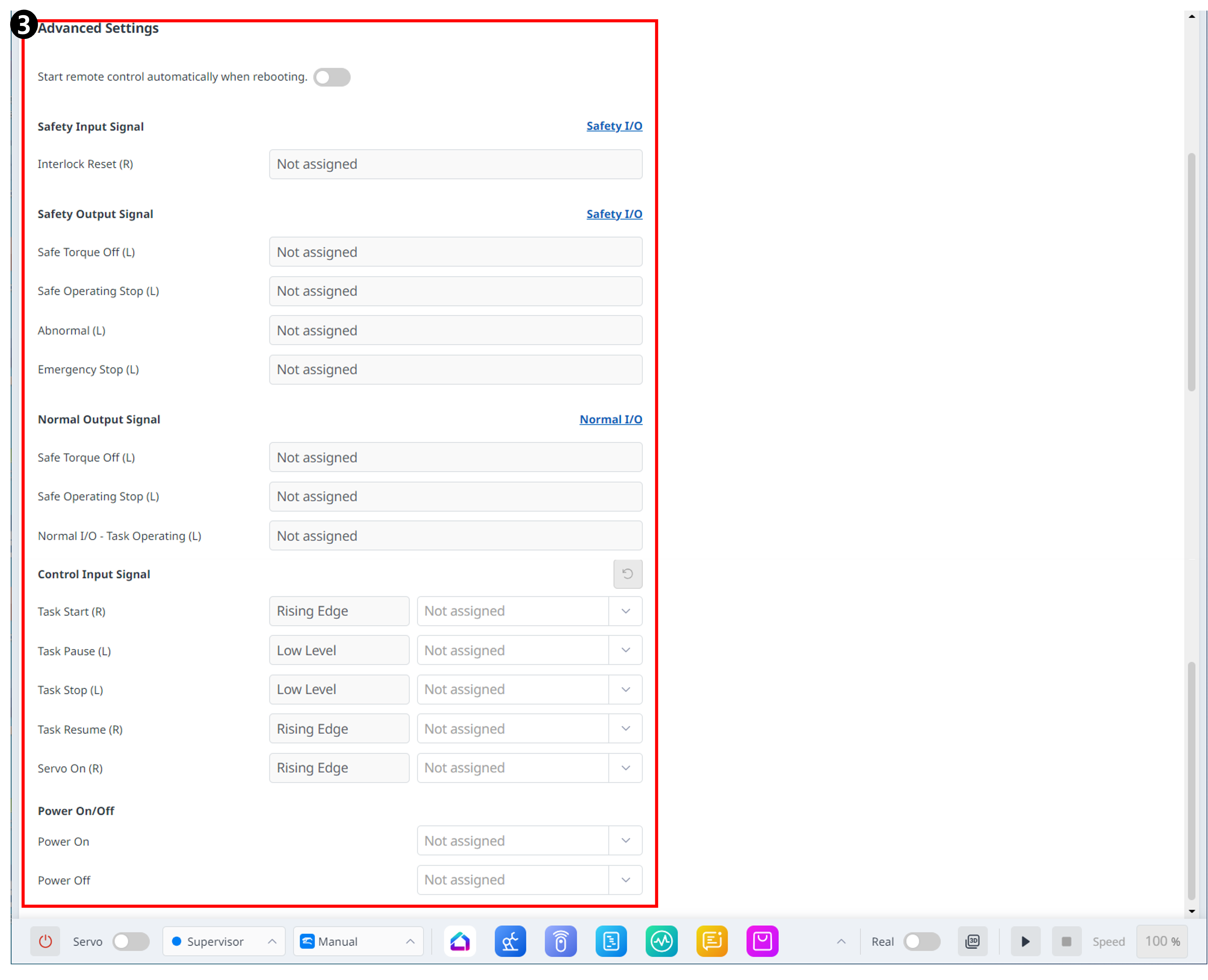
| 3 | Ajustes avanzados | Esto permite ajustes avanzados para el control remoto. Puede configurar cada puerto para la tarea para iniciar/pausar/detener/reanudar/servo encendido. Si el control remoto está configurado para ejecutarse automáticamente después de reiniciar, se ejecutará tan pronto como se reinicie Dart-Platform. |
| 4 | Inicie el control remoto | Este botón le permite iniciar el control remoto después de que se hayan completado todos los ajustes. |
Elementos de configuración
Configuraciones obligatorias
En Configuración obligatoria, debe configurar los elementos esenciales para ejecutar el control remoto.
Estos ajustes deben completarse para habilitar la función de control remoto.
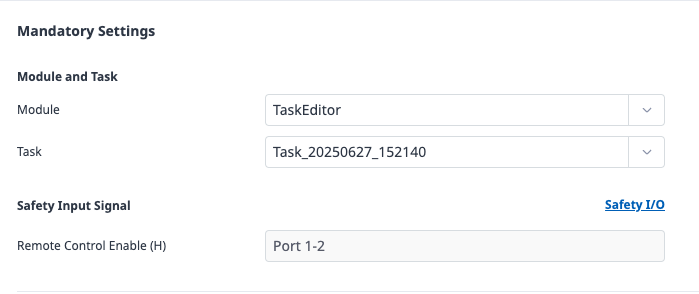
Seleccione Módulo y tarea
Seleccione el módulo que admite el control remoto y especifique la tarea a controlar dentro de ese módulo.
Señal de entrada de seguridad
Configure la señal de habilitación del control remoto.
Puede especificar esto en la pestaña de E/S de seguridad del módulo de Robot Parameter.
Ajustes avanzados
En Configuración avanzada, puede configurar adicionalmente las características opcionales necesarias para la operación de control remoto.
Estos ajustes son opcionales, y si no están configurados, la función básica de control remoto seguirá estando disponible.
Inicie el control remoto automáticamente al reiniciar

Cuando el botón de cambio está configurado en ON, el sistema entrará automáticamente en la pantalla Modo de control remoto después de reiniciar el robot.
Ajustes avanzados de señal
Todas las siguientes señales son opcionales.
Precauciones generales
Estos no son elementos obligatorios.
El mismo puerto y señal no se pueden asignar de forma redundante.
Señal de entrada de seguridad

Configure la señal de restablecimiento de interbloqueo para inicializar los dispositivos conectados.
Esto funciona de manera idéntica a la configuración de restablecimiento de interbloqueo en E/S de seguridad > Reset de interbloqueo en el módulo de Robot Parameter.
Señales de salida de seguridad
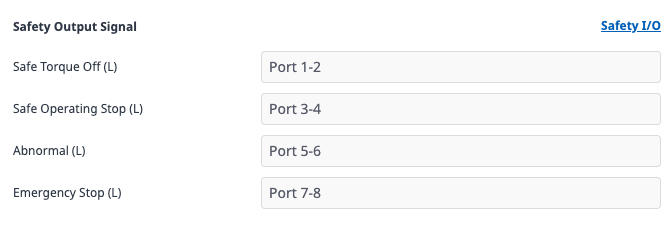
Puede asignar puertos de salida para STO, SOS y señales de parada de emergencia.
Si STO, SOS o Stop de emergencia ya están configurados en la sección Señales de salida de seguridad del módulo de Robot Parameter, se aplicarán esos ajustes.
Nota
Para obtener información detallada sobre cada señal, consulte la sección de Seguridad Señal I/O.
Señales de salida normales
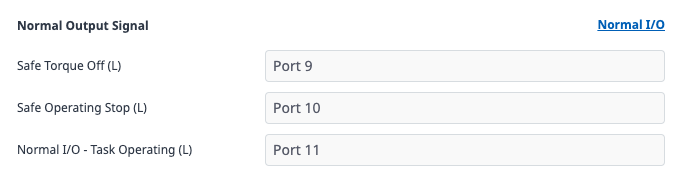
Puede asignar puertos de salida para STO, SOS y señales de operación de tareas.
Si las mismas señales ya están configuradas en la sección Señales de salida generales del módulo de Robot Parameter, se aplicarán esos ajustes.
Control de señales de entrada
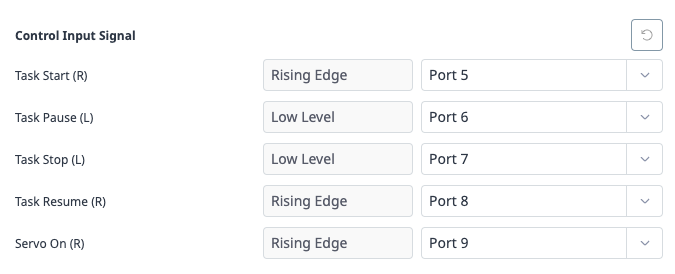
Puede asignar puertos de entrada para los comandos Start, Stop, Pause, Reanudar y Servo On.
Presione el botón Reset para borrar la configuración de la señal de entrada de control.
Encendido/apagado

Puede configurar los puertos de entrada para Power On/Off.
La descripción que se muestra junto a cada puerto de señal indica la condición de funcionamiento de esa señal.
Rising Edge
La señal de entrada se activa cuando se eleva.
Por ejemplo, la señal de inicio de tareas se activa cuando la entrada aumenta de 0V a 24V.
Al volver a intentarlo, primero debe devolver la señal a 0V antes de levantarla de nuevo.
Nivel bajo
La señal de parada tiene prioridad sobre la señal de inicio.
Por ejemplo, si la señal de parada está en un nivel bajo, la señal de inicio de tareas se ignorará y se mostrará un mensaje de señal de IO remoto ignorado.