
Módulo de Recovery
Módulo de Recovery: Si hay un error con una violación de seguridad continua o si un robot necesita ser embalado para su transporte, el usuario puede usar el Modo de Recovery de Seguridad para configurar la posición y el ángulo del robot.

Para acceder al módulo Recovery, toque el botón recuperación ubicado en la parte inferior.
Recuperación de software: En el estado Servo Off, si se produce una situación de error de violación de seguridad causada por violaciones de seguridad relacionadas con la posición, como el robot que sale del área de operación o viola áreas prohibidas, o se aplica fuerza continuamente cuando el robot se detiene debido a que colisiona con un objeto fijo, Servo On o Jog no se pueden configurar incluso cuando se intenta restablecer el robot a un estado normal usando el Jog o programa. En tales casos, el modo de recuperación de software se utiliza para restablecer el robot a la normalidad.
Modo de embalaje: Para empaquetar y transportar el robot, el robot puede ajustarse a valores predefinidos (que van más allá del límite de ángulo de operación normal) para el transporte.
Si el servo está habilitado cuando se inicia el módulo de recuperación, aparece el siguiente pop-up y el servo se apaga automáticamente.
Uso del modo de recuperación de software
Modo de recuperación de software
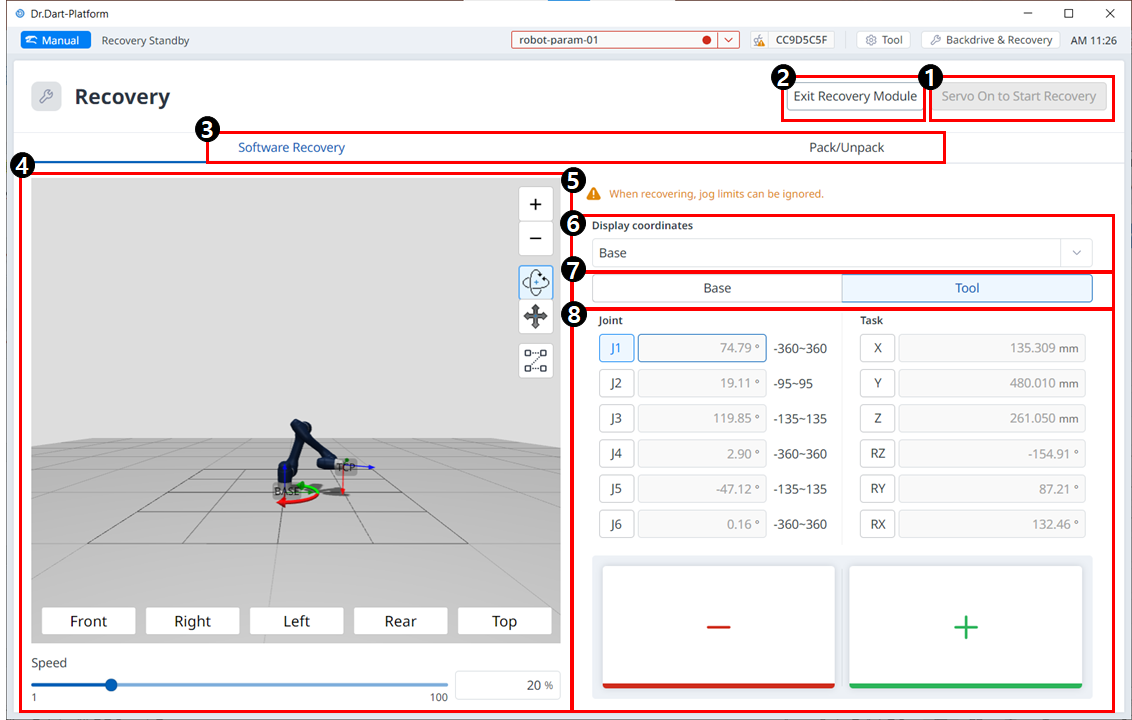
Menú
Temas | Descripción | |
|---|---|---|
| 1 | Servo para iniciar la recuperación | Este es un botón para habilitar el servo antes de entrar en el modo de recuperación. |
| 2 | Salir de recuperación | Este botón le permite salir del módulo de recuperación. |
| 3 | Encabezado | Esta sección le permite seleccionar el modo de recuperación de software o el modo de empaquetar / desempaquetar. |
| 4 | 3D Simulation | Esta área le permite previsualizar una simulación 3D de los valores establecidos. |
| 5 | Mensaje de advertencia | Esto explica las precauciones. |
| 6 | Mostrar coordenadas | Aquí es donde puedes establecer la coordenada basada en Base o Mundo. |
| 7 | Botón Base/Herramienta | Aquí es donde puede establecer el valor basado en Base o Herramienta. |
| 8 | Conjunto/tarea | Esta sección le permite introducir los valores deseados para hacer que el robot se mueva. |
Para utilizar el modo de recuperación de software, siga estos pasos:
Toca el menú Recovery en el panel de encabezado. La pantalla de recuperación de software aparece automáticamente en la ventana de recuperación.
Pulse cada botón de unión en el lado derecho de la pantalla de recuperación de software, y utilice
 los botones , para establecer la posición. O presione los botones de la cabina para ajustar el ángulo de la articulación mediante la enseñanza directa.
los botones , para establecer la posición. O presione los botones de la cabina para ajustar el ángulo de la articulación mediante la enseñanza directa.Para las definiciones de los botones en la cabina, consulte Cockpit
Los cambios realizados en la configuración se reflejan en la ventana de simulación de la izquierda en tiempo real.
Cuando se complete la configuración, pulse el botón X en la parte superior izquierda para cerrar la ventana.
Precaución
El modo de reparación del software no está disponible cuando el límite del ángulo de unión se excede en 3 grados.
Usando Pack/Unpack
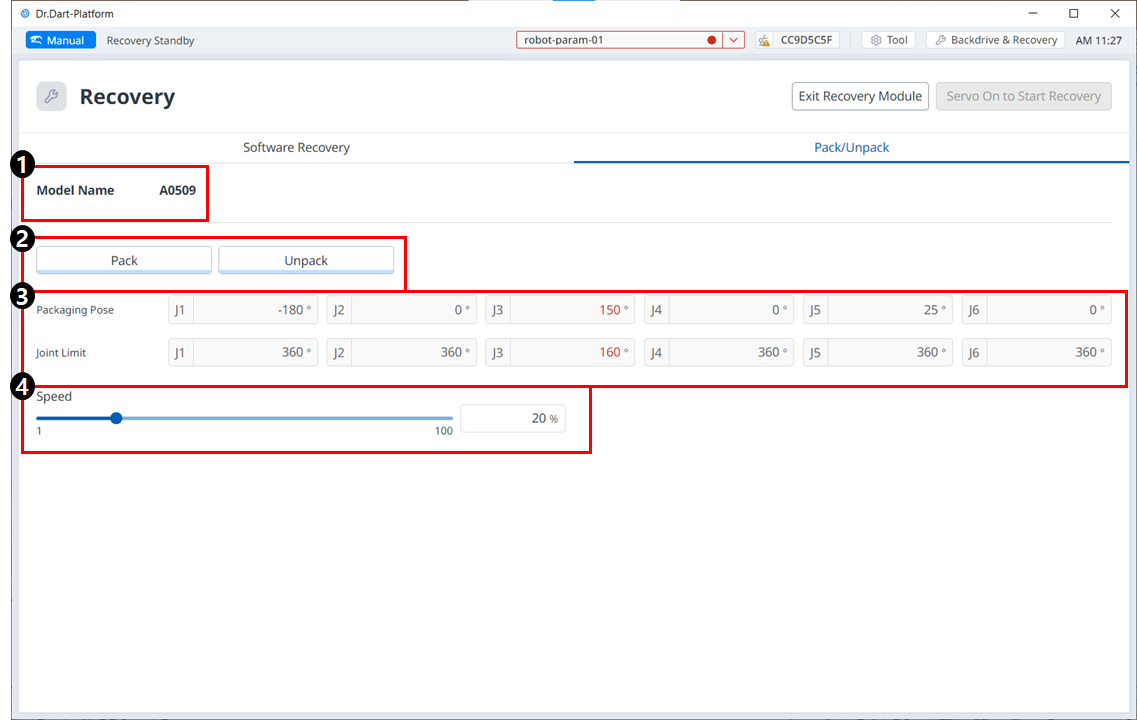
Menú
Temas | Descripción | |
|---|---|---|
| 1 | Nombre del modelo | Aparece el nombre del modelo de robot conectado. |
| 2 | Empacar/desempacar | Se puede seleccionar Pack o Unpack. |
| 3 | Posición de embalaje/límite de la junta | Aparecen los valores límite pose y joint. |
| 4 | Relación de velocidad | La velocidad del modo pack o unpack se puede ajustar a través de un deslizador o entrada. |
Para configurar el modo de empaquetado, siga estos pasos:
Toque el menú Recovery en el panel de encabezado.

Seleccione la pestaña Modo de empaquetado.

Toque el botón Servo On to Start Recovery para habilitar el modo de empaquetado.

El robot se mueve automáticamente a la pose de embalaje establecida.
El botón Pack le permite poner el robot en la posición Pack y el botón Unpack le permite poner el robot en la posición Home predeterminada.